1
Изобретение относится к области измерительной техники и может быть иснользовано для измерения угловой скорости движения основания.
Известны датчики угловой скорости, иостроенные на двухстепенных гироскопах, содержащие гиромотор, внешнюю рамку, преобразователь координат, датчик угла и приводной электродвигатель 1, 2. Недостатком этих устройств является наличие вредных моментов от боковых перегрузок.
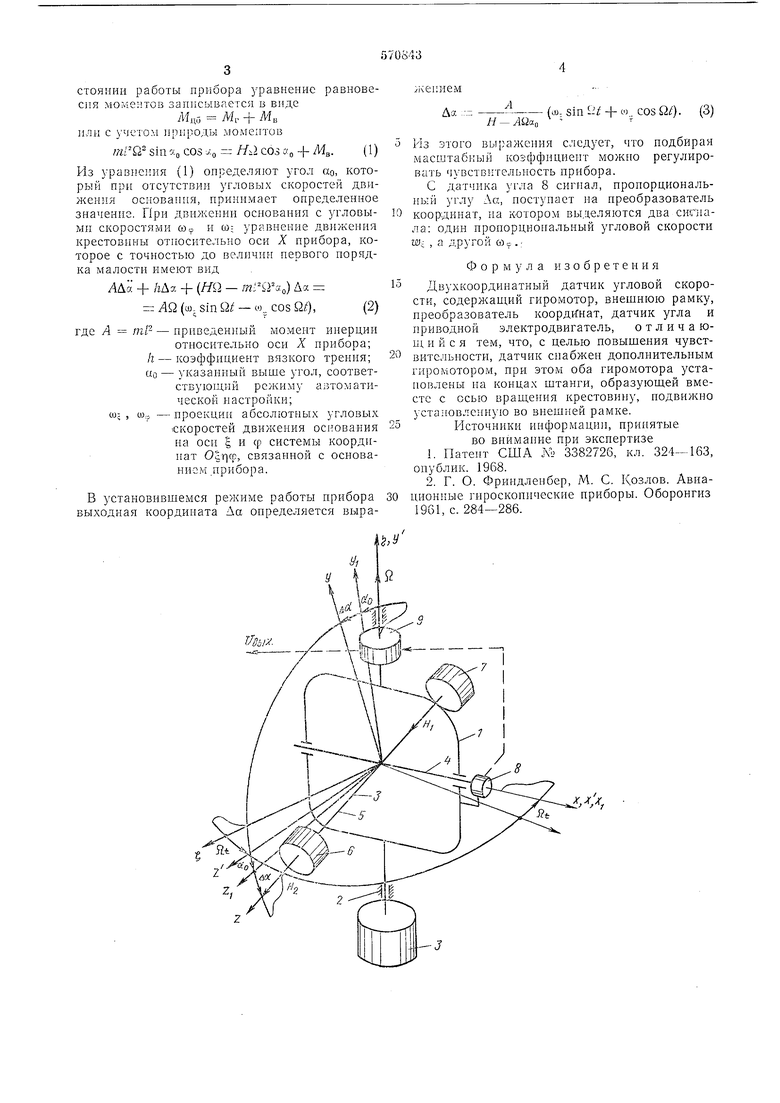
Цель изобретения - повышение чувствительности за счет исключения влияния боковых перегрззок и автоматической компенсации центробежного момента гироскопическим. Это достигается тем, что предлагаемый датчик угловой скорости снабжен дополнительным гиромотором, при этом оба гиромотора установлены на концах штанги, образующей вместе с осью вращения крестовину, нодвижно установленную во внешней рамке. На чертеже показана кинематическая схема двухкоординатного датчика угловой скорости.
Датчик состоит из внешней рамки 1, которая установлена в подшипниках корпуса 2 прибора и вращается вокруг оси Y с угловой скоростью Q Const при помощи синхронного электродвигателя 3. В опорах внешней рамки установлена ось 4 крестовины, на штанге 5 длиной 2/ которой закреплены гиромоторы 6 и 7, вращающиеся в одну сторону. На оси 4 установлен датчик 8 утла поворота крестовины относительно оси X прибора, который электрически соединен с преобразоватг;лем 9 координат.
Принцин действия прибора состоит в следующем.
С подачей напряжения на двигатель 3 и гиромоторы 6 и 7 и при отсутствии угловых скоростей движения основания по оси X прибора нрилол ены следующие моменты:
момент центробежных сил
Жцб - (/«1 -f- т.) /Q sin «о cos «о ; : тГ sin «о cos я„,
гдеао - угол между перпендикуляром к
оси вращения внещней рамки и осью Z прибора; nil, т2 - массы первого и второго гиромоторов, и гироскопический момент
Mf (Н, -f Яа) Q cos я„ . Яй cos а,
25
где HI, HZ - кинематические моменты первого и второго гиромоторов.
Суммарный вредный момент, приведенный 30 к оси X ирибора - М. В установивщемся со
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения кривизны горизонтальных и наклонных скважин | 1983 |
|
SU1141187A1 |
| Учебный прибор по механике | 1987 |
|
SU1497633A1 |
| ГИРОИНЕРЦИАЛЬНЫЙ МОДУЛЬ ГИРОСКОПИЧЕСКОГО ИНКЛИНОМЕТРА | 2012 |
|
RU2499224C1 |
| ГИРОСТАБИЛИЗАТОР ОПТИЧЕСКИХ ЭЛЕМЕНТОВ | 2016 |
|
RU2625643C1 |
| БЕЗОПОРНОЕ УСТРОЙСТВО РАЗВОРОТА СКВАЖИННОГО ПРИБОРА | 2000 |
|
RU2184229C2 |
| СИСТЕМА СТАБИЛИЗАЦИИ ЛИНИИ ВИЗИРОВАНИЯ | 1995 |
|
RU2102785C1 |
| СПОСОБ АВТОКОМПЕНСАЦИИ НЕЗАВИСЯЩИХ ОТ УСКОРЕНИЯ ДРЕЙФОВ ГИРОСКОПИЧЕСКОГО УСТРОЙСТВА | 2015 |
|
RU2603767C1 |
| Учебный прибор по механике | 1990 |
|
SU1767513A1 |
| ПРЕЦИЗИОННЫЙ ГИРОСТАБИЛИЗАТОР | 2009 |
|
RU2417352C1 |
| СПОСОБ ВЗВЕДЕНИЯ ПРУЖИНЫ ГИРОМОТОРА | 2001 |
|
RU2189012C1 |
