(54) ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА
того, нз-за перерегулирования скорости работа привода будет характеризоваться недостаточной надежностью. Перерегулирование скорости связано с тем, что реверс потока двигателя будет начинаться при скорости двигателя, близкой к заданной скорости вращения. Изза инерционности цепи возбуждения на изменение направления потока, а следовательно, момента двигателя требуется определенное время. В течение этого времени продолжается увеличение скорости двигателя под действием активного момента нагрузки, и она превысит заданную скорость вращения. Из-за перерегулирования скорости увеличивается время переходного процесса. Перерегулирование скорости снижает также надежность работы привода, так как оно может привести к авариям в механической части привода и вызвать из-за увеличения напряжения на двигателе так называемый «прорыв инвертора.
Целью изобретения является уменьщение перерегулирования скорости и времени регулирования при работе двигателя с активным моментом нагрузки. Для достижения этой цели электропривод постоянного тока снабжен дополнительным регулятором скорости и нелинейным элементом, имеющим коэффициент усиления для одной из полярностей входного сигнала меньший, чем для другой, причем первый вход дополнительного регулятора скорости подключен к источнику сигнала задания скорости через нелинейный элемент, второй вход - к датчику скорости, а выход - ко входу блока задания тока возбуждения.
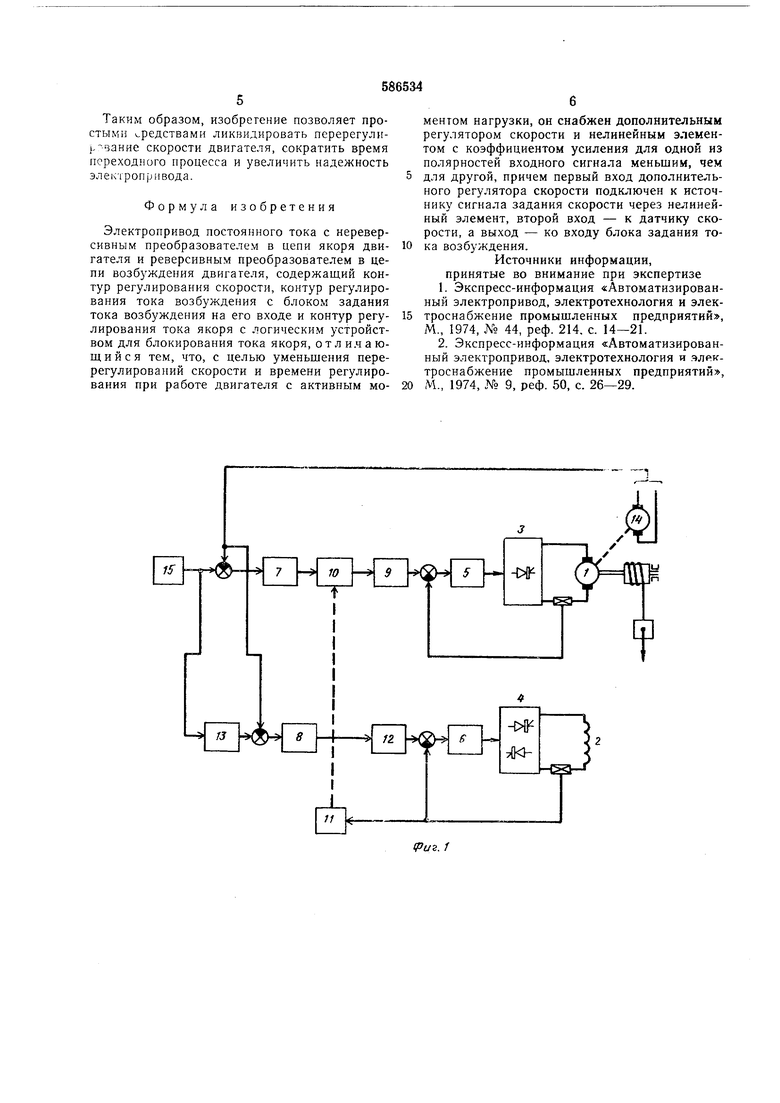
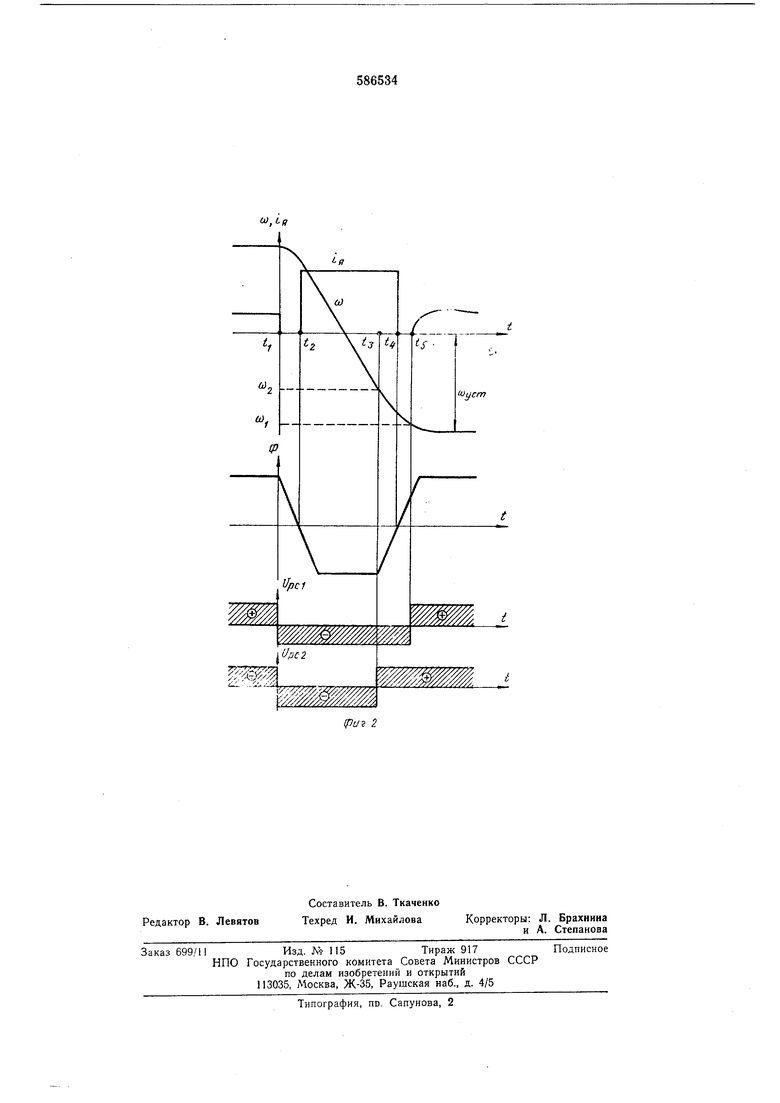
На фиг. 1 изображена функциональная схема предложенного электропривода; на фиг. 2 - диаграмма изменения его основных координат при реверсе скорости двигателя в сторону, совпадающую с действием активного момента нагрузки.
Электропривод содержит якорь двигателя постоянного тока 1 и его обмотку возбуждения 2, нереверсивный преобразователь цепи якоря 3 и реверсивный преобразователь 4 цепи возбуждения, регулятор 5 тока якоря, регулятор 6 тока возбуждения, основной регулятор 7 скорости, дополнительный регулятор 8 скорости, звено выделения модуля 9, ключевой элемент 10, управляющее устройство И, блок задания тока возбуждения 12, нелинейный элемент 13, датчик скорости 14. Ключевой элемент 10 и управляющее устройство 11 образуют логическое устройство для блокирования тока якоря. Ко входу регулятора 8 подключен источник сигнала задания скорости 15.
Выбор нелинейного элемента определяется следующим.
Коэффициент усиления нелинейного элемента для одной из полярностей входного сигнала должен быть меньще, чем для другой. Больший коэффициент усиления или, что то же, большее заданное значение скорости для дополнительного регулятора скорости, соответствует работе привода в направлении, противоположном действию активного момента наIpyjKH.
Предлагаемый электропривод pad. .ает следующим образом.
5 При реверсе в момент времени /i источника cnrna.ia задания скорости на его входе происходит изменение полярности напряжений t/pci и 6рс2 на выходах соответственно основного 7 и дополнительного 8 регуляторов скорости. Изменение полярпости напряжения t/pc2 вызывает, в свою очередь, изменение направления заданного значения потока двигателя на входе блока задания тока возбуждения 12, вследствие чего в этот же момент времени /1 начинается реверс потока Ф двигателя. В промежуток времени ti-/2 логическое устройство для блокирования тока якоря уменьшает ток якоря IH до нуля, так как текущее направление потока двигателя, контролируемое управляющим устройством 11, не соответствует требуемому направлению его момента, которое определяется полярностью напряжения 6рс1 на выходе основного регулятора скорости 7 и контролируется ключевым элементом 10; в это время уменьшение скорости ю двигателя происходит под действием момента статической нагрузки. С момента времени tz поток.приобретает требуемое направление, логическое устройство прекращает блокирование
0 тока якоря, и с этого времени уменьшение скорости и ее реверс происходят уже под действием суммарного момента двигателя и момента статической нагрузки. Вследствие того, что в направлении реверса дополнительный регулятор скорости 8 имеет меньшее заданное значение, чем основной 7, полярность напряжения Upc2 на его выходе меняется при скорости двигателя «2, меньшей, чем скорость иь при которой меняется полярность напряжения f/pci
0 на выходе основного регулятора. В промежуток времени момент двигателя уменьшается от максимального значения до нуля вследствие уменьшения потока двигателя. С момента времени t логическое устройство 11.лп
5 блокирования тока якоря снова уменьшает ток якоря до нуля, так как направление потока двигателя уже не соответствует требуемому направлению его момента, и в дальнейшем скорость двигателя увеличивается за счет дей0 стьия активного момента, создаваемого нагрузкой. В момент времени t, когда двигатель разгоняется до скорости шь близкой к установившейся скорости Шуст, меняется полярность напряжения fypci на выходе основного регулятора скорости, и логическое устройство прекращает блокирование тока якоря. К этому времени поток двигателя уже успевает нарасти до достаточной величины в требуемом направлении, и поэтому двигатель способен
0 развить момент, достаточный для уравновешивания момента, созданного нагрузкой. Вс.;1едствие этого переход на установившуюся скорость вращения соугт гропсходпт плавно, oc-i перерегулирований скорости и с миппмальпым временем переходио процесса.
Таким образом, изобретение позволяет простыми .редствами ликвидировать перерегули},-вание скорости двигателя, сократить время переходного процесса и увеличить надежность электропривода.
Формула изобретения
Электропривод постоянного тока с нереверсивным преобразователем в цепи якоря двигателя и реверсивным преобразователем в цепи возбзждения двигателя, содержащий контур регулирования скорости, контур регулирования тока возбуждения с блоком задания тока возбуждения на его входе и контур регулирования тока якоря с логическим устройством для блокирования тока якоря, от лила ющ и и с я тем, что, с целью уменьшения перерегулирований скорости и времени регулирования при работе двигателя с активным моментом нагрузки, он снабжен дополнительным регулятором скорости и нелинейным элементом с коэффициентом усиления для одной из полярностей входного сигнала меньшим, чем для другой, причем первый вход дополнительного регулятора скорости подключен к источнику сигнала задания скорости через нелинейный элемент, второй вход - к датчику скорости, а выход - ко входу блока задания тока возбуждения.
Источники информации, принятые во внимание при экспертизе
1.Экспресс-информация «Автоматизированный электропривод, электротехнология и электроснабжение промышленных предприятий, М., 1974, № 44, реф. 214. с. 14-21.
2.Экспресс-информация «Автоматизированный электропривод, электротехнология и .электроснабжение промышленных предприятий, М., 1974, № 9, реф. 50, с. 26-29.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления механизмом экскаватора | 1978 |
|
SU773212A1 |
| Электропривод постоянного тока | 1978 |
|
SU748756A2 |
| Электропривод шахтной подъемной машины | 1973 |
|
SU650192A1 |
| Реверсивный электропривод с двухзонным регулированием частоты вращения | 1978 |
|
SU780135A1 |
| Устройство для управления электроприводом постоянного тока | 1978 |
|
SU736320A1 |
| Электропривод постоянного тока с двухзонным регулированием частоты вращения | 1982 |
|
SU1096745A1 |
| Электропривод для подъемной машины | 1983 |
|
SU1159138A1 |
| Устройство для управления электроприводом поворота одноковшового экскаватора | 1975 |
|
SU670695A1 |
| Реверсивный электропривод постоянного тока с двухзонным регулированием частоты вращения | 1986 |
|
SU1394383A1 |
| Электропривод постоянного тока | 1984 |
|
SU1228208A2 |
(У-,
ts
Шуст
; t
