Изобретение относится к электроприводам постоянного тока и может применяться в электроприводах лифтов, шахтных подъемников, кранов, в которых отсутствуют существенные возмущающие воздействия со стороны нагрузки.
Известно устройство для управления электроприводом с реверсом поля, содержащее контур регулирования частоты вращения и подчиненные ему контуры регулирования тока якоря и магнитного потока возбуждения двигателя 1.
Наиболее близким к изобретению по технической сущности и достигаемому .результату является устройство для управления электроприводом с реверсом поля с нереверсивным преобразователем в цепи якоря и реверсивньлм преобразователем в цепи возбуждения двигателя, -содержащее контур регулирования частоты вращения двигателя с регулятором частоты врсодения и датчиком частоты вращения и подчиненные ему контур регулирования магнитного потока с регулятором и датчиком магнитного потока и контур регулирования тока якоря с блоком выделения модуля на его входе, регулятором и датчиком тока якоря 2,
Недостатки известного устройства - существенные перерегулирования и колзбательность переходных процессов п электроприводе, возникающее вследствие больших значений скорости изме-. нения момента двигателя перед переходом к его установившемуся значению, что, в свою очередь, определяется нелинейным характером изменения задания момента, пропорционального произведению задающих сигналов тока и магнит10ного потока двигателя.
Цель изобретения - уменьшение перерегулирования и колебательности переходных процессов в электроприводе.
Цель достигается тем, что в устрой15ство для управления электроприводом постоянного тока с нереверсивным преобразователем в цепи якоря и реверсивным преобразователем в цепи возбуждения двигателя, содержащее контур
20 регулирования частоты вращения двигателя с регулятором и датчиком частоты вращения и подчиненные ему контур регулирования магнитного потока с регулятором, и датчиком магнитного потока
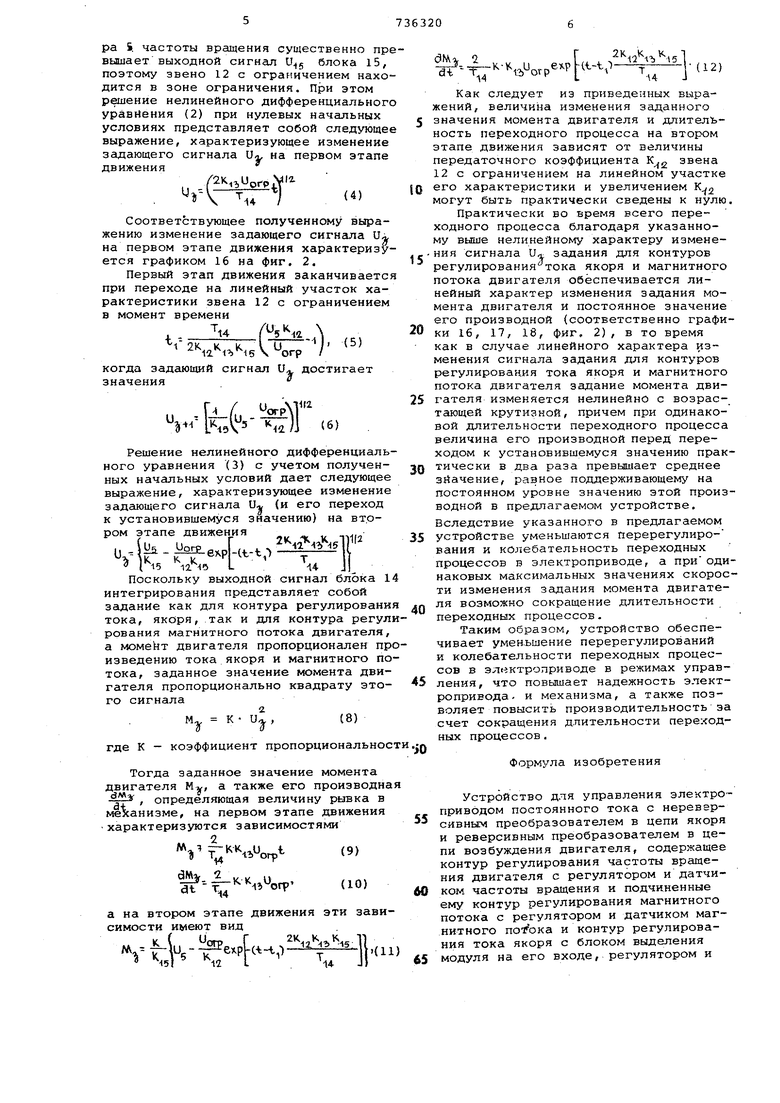
25 и контур регулирования тока якоря с блоком выделения модуля на его входе, регулятором и датчиком тока якоря, введены звено с ограничением, блок деления и блок интегрирования, а так30же нелинейный блок возведения в квадрат модуля входного сигнала, причем соединенные последовательно звено с ограничением, блок деления и блок интегрирования включены между выходом регулятора частоты вращения и входами контуров регулирования тока якоря и магнитного потока, нелинейный блок розведения в квадрат модуля входного сигнала включен между выходом блока интегрирования и входом звена с ограничением, а вход делителя блока деления соединен с выходом включенного на входе контура регулирования тока якоря блока выделения модуля. На фиг. 1 приведена схема устройства; на фиг. 2 - временные диаграммы, поясняющие его работу. Якорная цепь двигателя 1 подключена к нереверсивному преобразователю 2, а его обмотка 3 возбуждения - к реверсивному преобразователю 4. Устройство для управления электроприводом содержит контур регулирования частоты вращения двигателя с регулятором 5 и датчиком б частоты враиения и подчиненные ему контур регулирования магнитного потока с регулятором 7 и датчиком 8 магнитного потока и контур регулирования тока якоря с блоком 9 выделения модуля на его входе, регулятором 10 и датчиком 11 тока якоря, в устройство введены зве но 12 с ограничением, блок 13 делени и блок 14 интегрирования, нелинейный блок 15 возведения в квадрат модуля входного сигнала, причем соединенные последовательно звено 12 с ограничением блок 13 деления и блок 14 инте рирования включены между выходом регулятора 5 частоты вращения и входами контуров регулирования тока якоря и магнитного потока, нелинейный блок 1 возведения в квадрат модуля входного сигнала включен между выходом блок 14 интегрирования и входом звена 12 с ограничением, а вход делителя блок 13 деления соединен с выходом вклю ченного на входе контура регулирования тока якоря блока 9 вьщеления iMOдуля. На фиг. 2 приведены графики 16, 1 и 18, характеризующие соответственно изменения задающего сигнала U, задан ного значения момента М и его производной на обоих этапах движения. Устройство работает следующим обра зом. . Выходной сигнал блока 14 интегрироаания является задающим (f%) как для контура регулирования тока якоря так и для. контура регулирования магнитного потока двигателя. Формирование этого задающего сигнала обеспечивается с помощью звена 12 с ограничением, блока 13 деления, ко входу делителя которого подключен выход блока 9 выделения модуля, блока 14 интегрирования и нелинейности блока 15 возведения в квадрат модуля входного сиг Нала. На входе звена 12 с ограничением сравниваются выходной сигнал регулятора 5 частоты вращения Uj и выходной сигнал нелинейного блока 15 возведения в квадрат модуля входного сигнала , который характеризуется выражениемU -modU (i; signu К. Нелинейный блок 15 возведения в квадрат модуля входного сигнала может быть выполнен в виде блока перемножения и подключенных к его входам блока определения знака и блока возведения в квадрат, входы которых соединены с выходом блока 14 интегрирования (сигнал и) . Указанный нелинейный блок может быть выполнен также в виде блока перемножения, к двум входам которого подключен выход блока 4 интегрирования (сигнал и) непосредственно и через дополнительный блок выделения модуля. Наиболее просто этот нелинейный блок может быть реализован на операционном усилителе, на входе которого включен нелинейный резистор с квадратичной вольт-амперной характеристикой, При этом, если звено 12 с ограничением выполнено на операционном усилителе, указанный нелинейный резистор может быть включен непосредственно на вход звена 12 с ограничением. При больших рассогласованиях выходного сигнала регулятора 5 частоты вращения, выходного сигнала U..,5 нейного блока 15 возведения в квадрат модуля входного сигнала звено 12 с огргшичением находится в зоне насыщения, а его выходное напряжение равно напряжению ограничения . При этом дифференциальное уравнение, характеризующее изменение задающего сигнала и, имеет вид огр- signU ; где - постоянная времени блока 14 интегрирования; передаточный коэффициент блока.13 деления. При малых значениях рассогласования входных сигналов звена 12 с ограничением выходного, напряжение этого звена определяется линейным участком его характеристики. При этом изменение задающего сигнала Uj характеризуется нелинейным дифференциальным уравнением . Ь где . -,передаточный коэффициент звена 12 с ограничением на линейном участке его характеристики. В режиме разгона на первом этапе движения выходной сигнал Не; регулято pa S. частоты вращения существенно пр вышает выходной сигнал блока 15, поэтому звено 12 с ограничением нахо дится в зоне ограничения. При этом решение нелинейного дифференциальног уравнения (2) при нулевых начальных условиях представляет собой следующе выражение, характеризующее изменение задающего сигнала Uj, на первом этапе движения /2K,Uor2 -14 / Соответствующее полученному выражению изменение задающего сигнала Uj. на первом этапе движения характеризу ется графиком 16 на фиг, 2. Первый этап движения заканчиваетс при переходе на линейный участок характеристики звена 12 с ограничением в момент времени ), 2,,К,,К,5 огр / когда задающий сигнал U достигает значения ., .±.L MV V LSoV Nl)J (6) . Решение нелинейного дифференциаль ного уравнения (3) с учетом полученных начальных условий дает следующее выражение, характеризующее изменение задающего сигнала U (и его переход к установившемуся значению) на втором этапе движения 2к,К„К,(а I, - - UooLexD -(t-t -- ( Vb.5 %л. 1 V | Поскольку выходной сигнал блока 1 интегрирования представляет собой задание как для контура регулировани тока, якоря, так и для контура регул рования магнитного потока двигателя, а момейт двигателя пропорционален пр изведению тока якоря и магнитного по тока, заданное значение момента двигателя пропорционально квадрату этого сигнала м к. и, где К - коэффициент пропорциональнос Тогда заданное значение момента двигателя My, а также его производна - , определяющая величину рывка в механизме, на первом этапе движения характеризуются зависимостями M.KK,,, (9) dMj 2 T, dt a на вторюм этапе движения эти зависимости имеют вид -vtb- -t- l . Как следует из приведенных выражений, величина изменения заданного значения момента двигателя и длительность переходного процесса на втором этапе движения зависят от величины передаточного коэффициента К звена 12 с ограничением на линейном участке его характеристики и увеличением К могут быть практически сведены к нулю. Практически во время всего переходного процесса благодаря указанному выше нелинейному характеру изменения сигнала U,,; задания для контуров регулирования тока якоря и магнитного потока двигателя обеспечивается линейный характер изменения задания момента двигателя и постоянное значение его производной (соответственно графики 16, 17, 18, фиг, 2), в то время как в случае линейного характера изменения сигнала задания для контуров регулирования тока якоря и магнитного потока двигателя задание момента двигателя изменяется нелинейно с возрастающей крутизной, причем при одинаковой длительности переходного процесса величина его производной перед переходом к установившемуся значению практически в два раза превьлиает среднее зйачение, равное поддерживающему на постоянном уровне значению этой производной Б предлагаемом устройстве. Вследствие указанного в предлагаемом устройстве уменьшаются перерегулирования и колебательность переходных процессов в электроприводе, а приодинаковых максимальных значениях скорости изменения задания момента двигателя возможно сокращение длительности переходных процессов. Таким образом, устройство обеспечивает уменьшение перерегулирований и колебательности переходных процессов в электроприводе в режимах управления, что повышает надежность электропривода, и механизма, а также позволяет повысить производительность за счет сокращения длительности переходНЫ.Х процессов . Формула изобретения Устройство для управления электроприводом постоянного тока с нереверсивным преобразователем в цепи якоря и реверсивным преобразователем в цепи возбуждения двигателя, содержащее контур регулирования частоты вращения двигателя с регулятором и датчиком частоты вращения и подчиненные ему контур регулирования магнитного потока с регулятором и датчиком магнитного и контур регулирования тока якоря с блоком выделения модуля на его входе, регулятором и
датчиком тока якоря, отличающееся тем, что, с целью уменьшения перерегулирования и колебательности переходных процессов в электроприводе, в него введены звено с ограничением, блок деления и блок интегрирования, а также нелинейный блок возведения в квадрат модуля входного сигнала, причем соединенные последовательно звено с ограничением, блок деления и блок интегрирования включены между выходом регулятора частоты вращения и входами контуров регулирования тока якоря и
магнитного потока, нелинейный блок возведения в квадрат модуля входного сигнала включен: между выходом блока интегрирования и входом эвена с ограничением, а вход делителя блока деления соединен с выходом включенного на входе контура регулирования тока якоря блока выделения модуля.
Источники информации, принятые во внимание при экспертизе
1.Ж. BBC-Nachrichten, W 4, 8, 1976, с. 153-160,
2.Ж. Brown Boveri Review,
№ 3, 63, 1976, с, 188-194 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления электроприводом постоянного тока | 1978 |
|
SU746848A1 |
| Электропривод постоянного тока | 1976 |
|
SU657554A1 |
| Электропривод с подчиненным регулированием параметров | 1979 |
|
SU896733A1 |
| Реверсивный тиристорный электропривод с упругой передачей от двигателя к механизму | 1977 |
|
SU731539A1 |
| Устройство для управления асинхронным электроприводом | 1979 |
|
SU788325A1 |
| Устройство для демпфирования колебаний в упругой связи между двигателем и механизмом электропривода | 1978 |
|
SU714607A1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| Устройство для регулирования частоты вращения электропривода постоянного тока | 1977 |
|
SU731538A1 |
| Электропривод с подчиненным регулированием параметров | 1981 |
|
SU997215A2 |
| Электропривод постоянного тока с двухзонным регулированием частоты вращения | 1986 |
|
SU1385216A1 |
