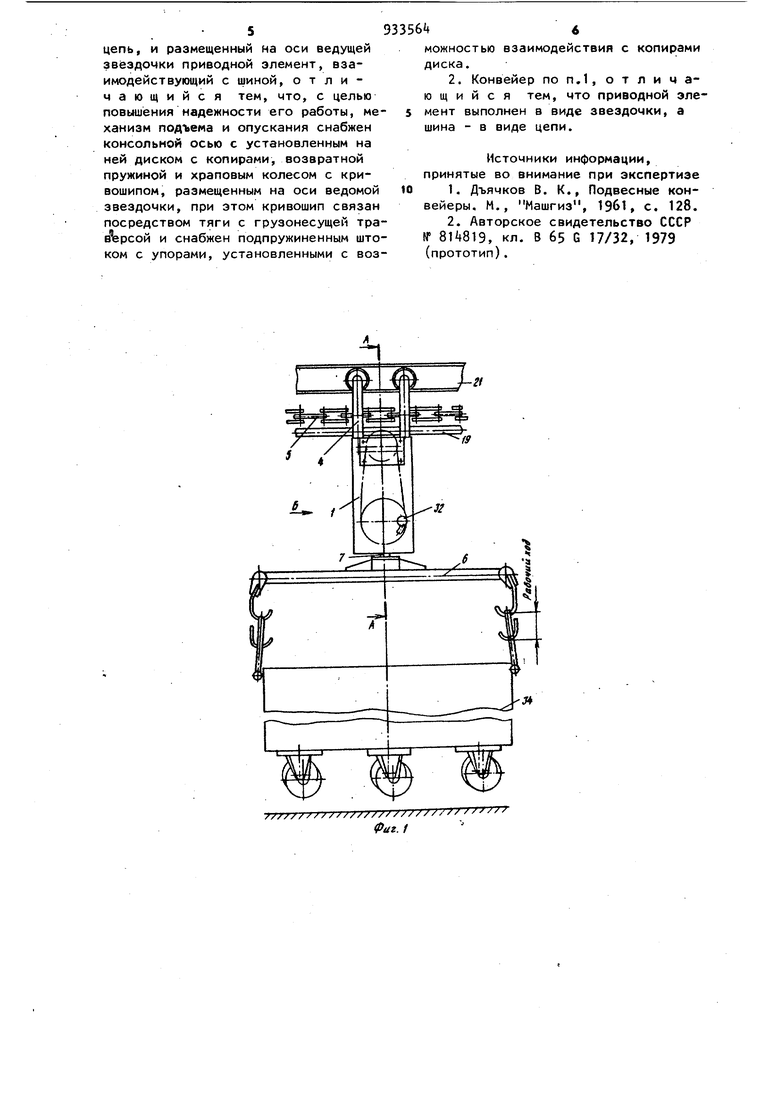
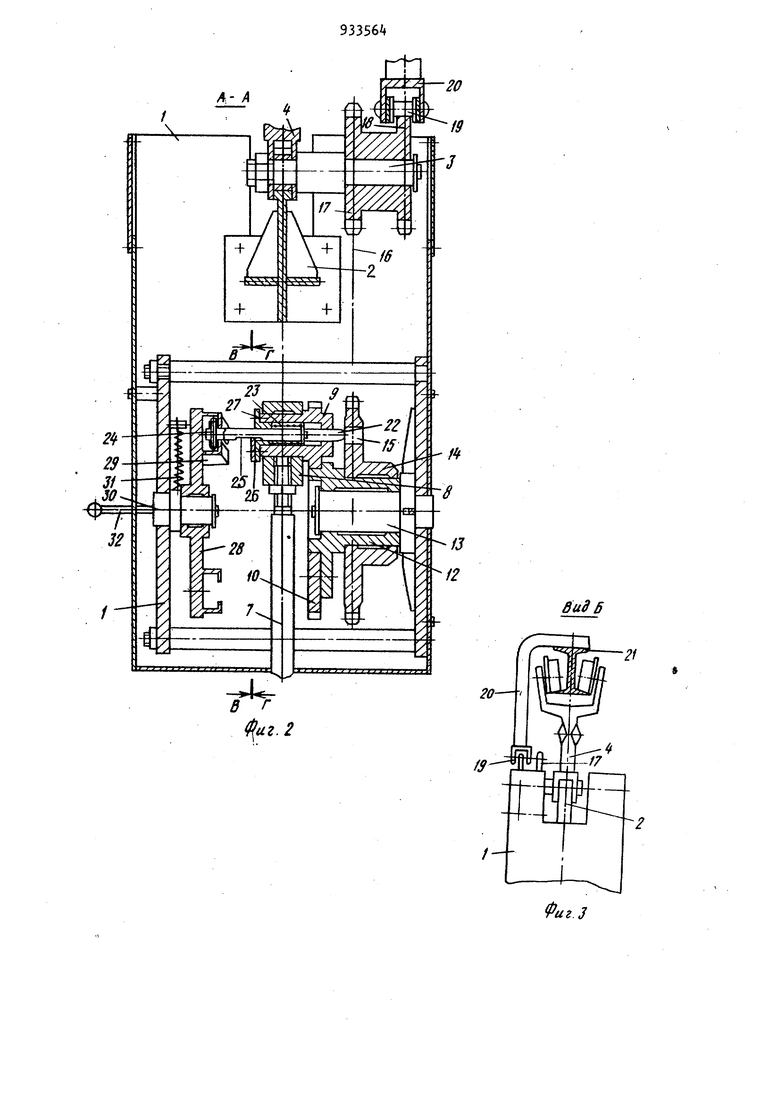
Изобретение относится к промышле ному транспорту, в частности подвес ным грузонесущим конвейерам. Известен подвесной конвейер, вкл чающий ходовой путь, тяговый орган с каретками с грузоподъемными устрбйствами, выполненными в виде рычажных захватов 1. Недостатком известного устройства является необходимость применения ручного труда для их обслуживания. Наиболее близким техническим решением из известных является подвес ной конвейер, включающий ходовой путь, тяговый орган с каретками, по парно соединенными с корпусом механизма подъема и опускания, содержащим огибающую установленные на осях ведущую и ведомую звездочки цепь, и размещенный на оси ведущей звездочки приводной элемент, взаимодействующий с шиной 2. Недостатком известного технического решения является ненадежность его работы. Цель изобретения - повышение надежности работы конвейера. Поставленная цель достигается тем, что в подвесном конвейере, включающем ходовой путь, тяговый орган с каретками, попарно соединенными с корпусом механизма подъема и опускания, содержащим огибающую установленные на осях ведущую и ведомую звездочки цепь, и размещенный на оси ведул ей звездочки приводной элемент, взаимодействующий с шиной, механизм подъема и опускания снабжен консольной осью с установленным на ней. диском с копирами, возвратной пружиной и храповым колесом с кривошипом, размещенным на оси ведомой звездочки при этом кривошип связан посредством тяги с грузонесущей траверсой и снабжен подпружиненным штоком с упорами, установленными с возможностью взаи Юдействия с копирами диска Кроме того, приводной элемент выполнен в .виде звездо чки, а шина - в виде цепи. На фиг. 1 показан общий вид конвейера; на фиг. 2 - разрез А-А на фиг.1; на фиг. 3 - вид Б на фиг.1; на фиг. k - разрез В-В на фиг.2; на фиг. 5 - разрез Г-Г на фиг.2. Подвесной конвейер содержит механизм для подъема и опускания, который состоит из корпуса 1, шарнирно соединенного с помощью серьги 2 и оси 3 с рабочей кареткой Ц конвейера 5, грузонесущую траверсу 6 с тягой i и проушиной 8, шарнирно закрепленный на полом пальце 9 кривошип установленный на храповом колесе 10, сто порную собачку 11. Храповое колесо 10 прикреплено к ступице 12,свободно сидящей на консольной оси 13. УЭ сту пице 12 свободно сидит ведомая звездочка I с радиально расположенными гнездами 15 связанная цепной переда чей 16 с ведущей звездочкой. Приводной элемент выполнен заодно с ведущей звездочкой 17 также в виде звездочки 18 и установлен на той же оси.З- При этом звездочка 18 уста новлена с возможностью взаимодействия с шиной, выполненной в виде цепи 19 установленной при помощи кронштейнов 20 параллельно ездовому пути 21 конвейера 5 В попом пальце 9 установлен палец 22,. снабженный пружиной 23 имеющий на одном из торцов упоры 2k, а также лыску 25 взаимодействующую с ри гелем 26, закрепленным на втулке 27 предохраняющим палец 22 от поворота вокруг его горизонтальной оси. Соосно с кривошипом установлен диск 28 с пространственными кулачками 29 свободно сидящий на консольной оси 30 и снабженный возвратной пружиной 31 рукояткой управления 32 расположенной в радиальном пазу 33 корпуса 1. Груз З подвешивается на грузонесущей траверсе 6. Работает устройство следующим образом. При движении конвейера 5 одна из звездочек .или шестерен блока входит во взаимодействие с цепью или зубчатой рейкой, закрепленной в приводной шине 19 в зоне загрузки и разгрузки. При этом блок звездочек 17 н чинает вращаться и посредством цепНОЙ передачи 16 передает вращение ведомой звездочке . В исходном положении грузонесущая траверса 6 находится в нижнемположении, а упоры 2k пальца 22 находятся во взаимодействии с нижним кулачком 29 диска 28. Крюки грузонесущей траверсы 6 соединяются с грузом 3 например, напольно-подвесной тсглежкой, движением рукоятки управления 32 диск 28 поворачивается, упоры 2k пальца 22 выходят из зацепления с кулачком 29 и под действием пружины 23 входят в гнездо 15 ведомой.звездочки 1. При этом храповое 10 с кривошипом начинает поворачиваться вместе со звездочкой k, поднимая груз 3k вверх. При подходе к верхнему положению упоры 2k пальца 22 входят во взаимодействие с верхним кулачком 29 диска 28, выводя палец 22 из гнезда 13 звездочки 1. Операция подъема окончена, храповое колесо 10 удерживается в верхнем положении стопорной собачкой 11. Для надежной фиксации груза 3k в верхнем положении расцепление пальца 22 осуществляется в момент, когда кривошип не достиг на 5.. 10 верхней мертвой точки, т.е. груз 3k создает грузовой элемент, препятствующий свободному повороту храпового колеса 10 с кривошипом. Разгрузка конвейера 5. Движением рукоятки управления 32 в том же направлении, что и при операции sai- рузки, поворачивается диск 28, кулачок 29 освобождает упоры 2k пальца 22 и процесс повторяется аналогично описанному до нижней мертвой точки храпового колеса 10 с кривошипом. Изобретение обеспечивает механизацию подъема и опускания груза, что позволяет максимально использовать грузоподъемность рабочей каретки конвейера, достичь его полной производительности и тем самым повысить надежность его работы. Формула изобретения 1. Подвесной конвейер, включающий ходовой путь тяговый орган с каретками, попарно соединенными с корпусом механизма подъема и опускания, содержащим огибающую установленные на осях ведущую и ведомую звездочки
цепь, и размещенный на оси ведущей звёздочки приводной элемент, взаимодействующий с шиной, отличающийся тем, НТО, с целью повышения надежности его работы, ме ханизм подъема и опускания снабжен консольной осью с установленным на ней диском с копирами, возвратной пружиной и храповым колесом с кривошипом, размещенным на оси ведомой звездочки, при этом кривошип связан посредством тяги с грузонесущей тра вЪрсой и снабжен подпружиненным што ком с упорами, установленными с воз
93356it4
можностью взаимодействия с копирами диска.
2. Конвейер поп.1,отличаю щ и и с я тем, что приводной элемент выполнен в виде звездочки, а шина - в виде цепи.
Источники информации, принятые во внимание при экспертизе
1.Д-ьячков В. К., Подвесные конвейеры, М., Машгиз, 1961, с. 128.
2.Авторское свидетельство СССР № 814819, кл, В 65 G 17/32, 1979 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Перегрузочное устройство для штучных грузов | 1977 |
|
SU701896A1 |
| Устройство для перегрузки подвесок с траверс подвесного конвейера | 1981 |
|
SU1004227A1 |
| Подвесной грузонесущий конвейер | 1987 |
|
SU1446062A1 |
| Устройство для перегрузки изделий | 1980 |
|
SU948817A1 |
| Устройство для навески и съема изделий с подвесок подвесного конвейера | 1981 |
|
SU994376A1 |
| Устройство для передачи подвесок с одного грузонесущего конвейера на другой | 1978 |
|
SU753739A1 |
| Подвесной конвейер для транспортирования длинномерных грузов | 1971 |
|
SU449857A1 |
| Устройство для перегрузок подвесок подвесного конвейера с одного пути на другой | 1974 |
|
SU682431A1 |
| Шаговый конвейер | 1990 |
|
SU1720955A1 |
| Шаговый конвейер | 1990 |
|
SU1787880A1 |
Фиг J
