Изобретение относится к области электрических машин и может быть использовано для измерения электромагнитного момента погружных асинхронных двигателей, применяемых в нефтяной и газовой промышленности.
Известен способ [1] и устройства [2, 3] косвенного измерения электромагнитного момента двигателя по методу IZ - компенсации, при котором информация о магнитном потоке в зазоре машины переменного тока получается путем интегрирования напряжения, пропорционального ЭДС фазы и полученного путем физического моделирования фазы двигателя.
Физическое моделирование ЭДС фазы вносит дополнительную погрешность при измерении потокосцеплений и не обладает универсальностью, т.к. использует элементы, моделирующие параметры конкретного двигателя.
Другой способ [4] и устройство [5] косвенного измерения электромагнитного момента основаны на определении магнитного потока в зазоре машины с помощью измерительных элементов (датчиков Холла, измерительных катушек), укрепленных на внутренней поверхности статора. Недостатком способа является сложность конструкции, поскольку размещение измерительных элементов в воздушном зазоре машины связано с необходимостью ее разборки, что не всегда возможно по условиям эксплуатации и снижает надежность устройств.
Известен способ [6] бесконтактного непрерывного определения электромагнитного момента двигателя переменного тока, основанный на измерении действительных значений токов и напряжений статора. Способ [6], реализованный в устройствах [7, 8, 9, 10], по технологической сущности и достигаемым результатам является наиболее близким к предлагаемому техническому решению и принимается за прототип.
В соответствии с данным способом бесконтактного непрерывного определения электромагнитного момента трехфазного асинхронного двигателя измеряют действительные токи и напряжения статора двигателя, значения которых подают на вход вычислительного устройства, с помощью которого вычисляют момент по зависимости

где ψст - результирующий вектор потокосцепления статора, Iст - результирующий вектор тока статора.
Структурная схема реализации способа-прототипа содержит три датчика фазных напряжений статора (их мгновенных значений), три датчика мгновенных значений фазных токов статора и вычислительное устройство, подключенное к датчикам напряжений и датчикам токов. Вычислительное устройство содержит блок определения напряжений по двум прямоугольным координатам, подключенный к датчикам фазных напряжений, блок определения составляющих токов по двум прямоугольным координатам, подключенный к датчикам токов статора, два элемента определения составляющих производной по времени потокосцепления по двум прямоугольным координатам, подключенные к выходам указанных блоков, два блока интегрирования, включенные на выходах этих элементов, два блока перемножения, первые входы которых соединены с выходами двух блоков интегрирования, а вторые их входы соединены с выходами блока определения составляющих токов статора по двум прямоугольным координатам, элемент суммирования, подключенный к выходам двух блоков перемножения.
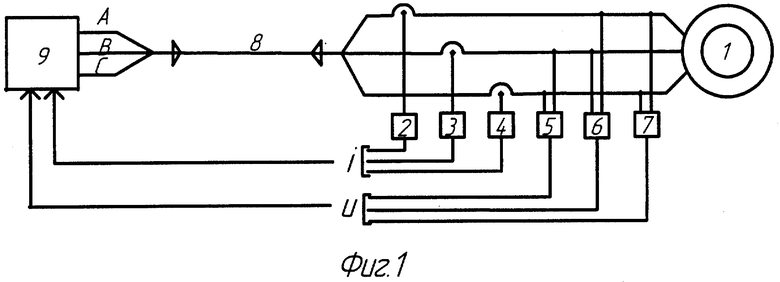
Недостатком прототипа являются ограниченные функциональные возможности. Так, данным способом невозможно измерить электромагнитный момент у погружных асинхронных двигателей. Последние используются в буровых установках нефтяной и газовой промышленности и по условиям их эксплуатации работают в стволах скважин на глубинах, доходящих до 1,8...2,7 км от поверхности земли. Для измерения электромагнитного момента по способу [6] необходимо, во-первых, разместить на погружном двигателе 1 (фиг.1), находящемся в стволе скважины на глубине 1,8...2,7 км, три датчика 2, 3, 4 фазных токов статора и три датчика 5, 6, 7 фазных напряжений, во-вторых, измерить высоковольтные фазные напряжения и токи статора двигателя и, в-третьих, передать данные измерений по дополнительной двенадцатипроводной линии связи i, u (фиг.1) в наземную станцию управления 9. Выполнение этих условий на действующих нефтяных и газовых скважинах практически невозможно.
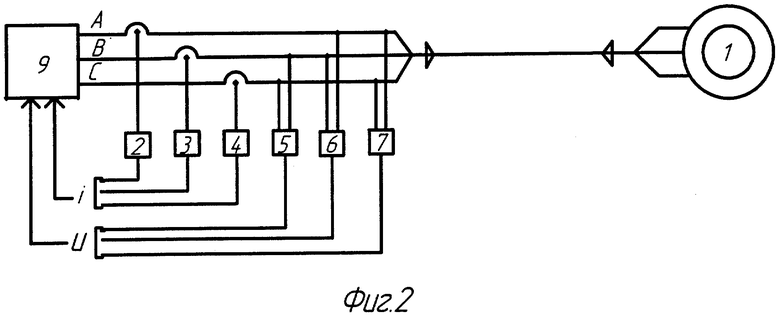
Принципиально возможно определение электромагнитного момента у погружного трехфазного асинхронного двигателя в переходных и установившихся режимах путем наземных измерений токов и напряжений непосредственно в фазах А, В, С электропитающей сети (фиг.2) и вычислении электромагнитного момента по зависимости (1). Однако между фазными напряжениями электросети и выходными фазными напряжениями кабельной линии электропитания (фиг.2) большой протяженности имеются отличия за счет потерь напряжения в самой кабельной линии 8. Эти потери создают методическую погрешность определения электромагнитного момента у погружного асинхронного двигателя по результатам наземных измерений.
Как показывают расчеты [11] величина погрешности в сторону завышения значений электромагнитного момента составляет примерно 41% при длине кабельной линии 2 км. Такую погрешность следует признать практически неприемлемой. Поэтому формальная замена фазных напряжений статора погружного двигателя на напряжения фаз А, В, С (фиг.2) электросети неправомерна при определении электромагнитного момента по предлагаемому способу.
Задачей изобретения является расширение функциональных возможностей способа бесконтактного непрерывного измерения электромагнитного момента у погружных асинхронных двигателей в переходных и установившихся режимах и повышение точности способа.
Поставленная задача решена за счет того, что в способе бесконтактного непрерывного определения электромагнитного момента трехфазного асинхронного двигателя в переходных и установившихся режимах работы, по которому измеряют действительные токи и напряжения, по которым вычисляют результирующий вектор потокосцепления статора и результирующий вектор тока статора, а затем определяют электромагнитный момент по зависимости
где ψст - результирующий вектор потокосцепления статора, iст - результирующий вектор тока статора, согласно изобретению осуществляют указанные измерения в фазах сети, питающей асинхронный двигатель, дополнительно измеряют длину кабеля, соединяющего двигатель с сетью, определяют потери фазных напряжений на индуктивном и на омическом сопротивлениях жил кабельной линии, алгебраически суммируют их с действительными значениями одноименных фазных напряжений питающей сети и полученные трехфазные напряжения и измеренные фазные токи питающей сети используют для вычисления результирующего вектора потокосцепления статора и результирующего вектора тока статора.
Сущность изобретения поясняется чертежами, где на фиг.1 изображена структурная схема измерения электромагнитного момента у погружного асинхронного двигателя в переходных и установившихся режимах известным способом; на фиг.2 приведена структурная схема измерения электромагнитного момента путем формальной замены фазных напряжений статора погружного двигателя на напряжения фаз А, В, С питающей электросети, а на фиг.3 дается блок-схема устройства для реализации заявляемого способа измерения электромагнитного момента. Устройство для реализации заявляемого способа содержит три датчика 1-3 мгновенных значений фазных токов iA, iB, iС электросети, питающей асинхронный двигатель; три датчика 4-6 фазных напряжений uA, uB, uC, электросети (их мгновенных значений); три идентичных блока 7-9 определения потерь фазных напряжений в кабельной линии 10; три элемента 11-13 выделения напряжений статора асинхронного двигателя 14 и вычислительное устройство 15 определения электромагнитного момента. Вариант выполнения блоков 7-9 с описанием их работы дается в приложении 2 к данной заявке на изобретение.
Способ бесконтактного непрерывного измерения электромагнитного момента трехфазных асинхронных двигателей осуществляется следующим образом.
Датчики тока 1-3 и напряжения 4-6 подключаются к соответствующим фазным цепям электропитания асинхронного двигателя. Сигналы с датчиков 1-3 фазных токов (фиг.3), пропорциональные также токам статора асинхронного двигателя [11], поступают на вычислительное устройство 15 для определения электромагнитного момента, а также на первые входы блоков 7-9 определения потерь фазных напряжений в кабельной линии 10. На вторые входы указанных блоков подается с измерительного устройства сигнал в виде постоянного напряжения u1 пропорциональный длине 1 кабельной линии 10. При этом на первом выходе блока 7 формируется сигнал

пропорциональный мгновенным значениям потерь напряжения фазы А на омическом сопротивлении жилы кабеля электропитания 10, где Ro - сопротивление кабеля на единицу длины; k1 - коэффициент пропорциональности.
На втором выходе блока 7 формируется сигнал

пропорциональный мгновенным значениям потерь напряжения фазы А на индуктивном сопротивлении жилы кабеля электропитания 10, где Lo - индуктивность кабеля на единицу длины; k2 - коэффициент пропорциональности.
Аналогичным соотношениям удовлетворяют выходные сигналы блоков 8, 9 определения потерь напряжения фаз В и С в кабельной линии 10. Выходные сигналы блоков 7-9 вместе с выходными сигналами датчиков напряжений 4-6, пропорциональными мгновенным значениям uA,uB,uC фазных напряжений электропитающей сети, поступают на входы элементов 11-13. Последние реализуют операцию алгебраического суммирования указанных сигналов по формулам

где кu - передаточный коэффициент датчиков напряжений, и при обеспечении равенства

формирует на своих выходах трехфазную систему сигналов
пропорциональных напряжениям статора асинхронного двигателя 14 (фиг.3). Трехфазные напряжения uA, uB, uC участвуют вместе с сигналами от датчиков тока 1-3 в определении результирующего вектора потокосцепления статора ψст и результирующего вектора тока статора iст, по которым вычисляется (см. ур-ние 1) мгновенное значение электромагнитного момента М с помощью вычислительного устройства 15, не отличающегося от вычислительного устройства прототипа [6].
Техническим преимуществом заявляемого способа бесконтактного непрерывного измерения момента в сравнении с прототипом является более широкая область применения, позволяющая, в частности, измерять мгновенное значение электромагнитного момента у погружных асинхронных двигателей, для которых измерения токов и напряжений в фазах статора невозможны по условиям эксплуатации таких двигателей. Другим преимуществом способа является снижение методической погрешности определения электромагнитного момента по результатам наземных измерений с 41% до приемлемого для практических целей значения не более 8% при длине кабельной линии 8 электропитания в 2 км. При этом, как показывают расчеты, приведенные в приложении 3 к данной заявке на изобретение, значение методической погрешности слабо зависит от длины кабельной линии.
Все это подтверждает техническую эффективность предлагаемого способа и обеспечивается измерениями фазных токов и напряжений в электросети, питающей асинхронный двигатель, дополнительным измерением длины кабельной линии и определением потерь фазных напряжений на индуктивном и на омическом сопротивлениях жил кабельной линии.
Реализация предлагаемого способа измерения мгновенных значений электромагнитного момента может быть выполнена с использованием стандартных датчиков тока и напряжения, измерительных преобразователей перемещений, интегральных микросхем, таких как цифроаналоговые преобразователи (ЦАП) КР572ПА1А [12] аналого-цифровых преобразователей (АЦП) КР572ПВ1А, масштабных преобразователей на операционном усилителе КР140УД17 с использованием соответствующих дискретных компонентов (резисторов и конденсаторов). Наиболее вероятный и приемлемый вариант реализации способа заключается в использовании для этой цели стандартных плат сбора и обработки информации АЦП/ЦАП, таких, например, как PCI - 4551 (АЦП, два канала ЦАП с выходным сигналом ±10 В, ±1 В, ±0,1 В; переключение выполняется программным путем) и PCI - MIO - 16ХЕ -10 (АЦП, два ЦАП с выходным сигналом ±10 В и О - 10 В) фирмы National Instruments вместе со стандартными датчиками. Способ может быть использован в нефтяной и газовой промышленности для непрерывного бесконтактного измерения мгновенного значения электромагнитного момента асинхронных двигателей в буровых установках.
Источники информации
1. Поляков Г.Н. и др. Об одном методе измерения электромагнитного момента при частотном управлении асинхронным двигателем. Тезисы докладов, Смоленск, 1975.
2. Авторское свидетельство СССР N 492764, кл. G01L 3/00, 1974.
3. Авторское свидетельство СССР N 781622, кл. G01L 3/00, 1978.
4. Дацковский Л.Х., Тарасенко Л.М. и др. Синтез систем подчиненного регулирования в асинхронных электроприводах с непосредственными преобразователями частоты. Электричество, 9, 1975.
5. Авторское свидетельство СССР N 649971, кл. G01L 3/00, 1976
6. Авторское свидетельство СССР N 342093. кл. G01L 3/00, 1970.
7. Авторское свидетельство СССР N 1606882 А1, кл. G01L 3/00, 1988.
8. Авторское свидетельство СССР N 976313, кл. G01L 3/00, 1981
9. Авторское свидетельство СССР N 1545107 A1, кл. G01L 3/00, 1987.
10. Авторское свидетельство СССР N 691703, кл. G01L 3/10, 1977.
11. Поверка средств электрических измерений: Справочная книга / Л.И.Любимов, И.Д.Форсилова, Е.З.Шапиро. - Л.: Энергоатомиздат, 1987. - 296 с.: ил., раздел «Погрешности косвенных измерений».
12. Смирнов В.И., Петров Ю.А., Рязанцев В.И. Основы проектирования и расчета следящих систем. М.: Машиностроение, 1993, с.26-36.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОДВИГАТЕЛЕМ ПЕРЕМЕННОГО ТОКА | 2021 |
|
RU2775819C1 |
| СПОСОБ ПОЛУЧЕНИЯ СИГНАЛА ОЦЕНКИ ЧАСТОТЫ ВРАЩЕНИЯ РОТОРА И СИГНАЛА ОЦЕНКИ МОМЕНТА СОПРОТИВЛЕНИЯ НА ВАЛУ АСИНХРОННОГО ДВИГАТЕЛЯ | 2023 |
|
RU2822608C1 |
| Способ определения момента нагрузки асинхронного электродвигателя | 2024 |
|
RU2838353C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ ВРАЩЕНИЯ ПОГРУЖНЫХ АСИНХРОННЫХ ЭЛЕКТРОДВИГАТЕЛЕЙ | 2011 |
|
RU2463612C1 |
| Способ определения расхода жидкости центробежного насоса с асинхронным электроприводом | 2021 |
|
RU2781571C1 |
| СПОСОБ ОПТИМАЛЬНОГО ВЕКТОРНОГО УПРАВЛЕНИЯ АСИНХРОННЫМ ДВИГАТЕЛЕМ | 2009 |
|
RU2402147C1 |
| СПОСОБ ОЦЕНКИ РЕГУЛИРУЕМЫХ СИГНАЛОВ ТРЕХФАЗНОГО ДВИГАТЕЛЯ С КОРОТКОЗАМКНУТЫМ РОТОРОМ | 1998 |
|
RU2158472C2 |
| ЭЛЕКТРОПРИВОД С СИНХРОННОЙ РЕАКТИВНОЙ МАШИНОЙ | 2012 |
|
RU2510877C1 |
| СПОСОБ ОЦЕНКИ РЕГУЛИРУЕМЫХ СИГНАЛОВ ТРЕХФАЗНОГО ДВИГАТЕЛЯ С КОРОТКОЗАМКНУТЫМ РОТОРОМ | 1998 |
|
RU2158471C2 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОМАГНИТНЫМ МОМЕНТОМ И МАГНИТНЫМ ПОТОКОМ ЭЛЕКТРИЧЕСКОЙ МАШИНЫ ПЕРЕМЕННОГО ТОКА | 2011 |
|
RU2469459C1 |
Изобретение относится к измерительной технике и может быть использовано для измерения электромагнитного момента погружных асинхронных двигателей, применяемых в нефтяной и газовой промышленности. Технический результат - расширение функциональных возможностей. Для достижения данного результата осуществляют измерения токов и напряжений в фазах сети, питающей асинхронный двигатель. При этом дополнительно измеряют длину кабеля, соединяющего двигатель с сетью, определяют потери фазных напряжений на индуктивном и на омическом сопротивлениях жил кабельной линии, алгебраически суммируют их с действительными значениями одноименных фазных напряжений питающей сети. Полученные трехфазные напряжения и измеренные фазные токи питающей сети используют в процессе определения результирующего вектора потокосцепления статора и результирующего вектора тока статора. 3 ил.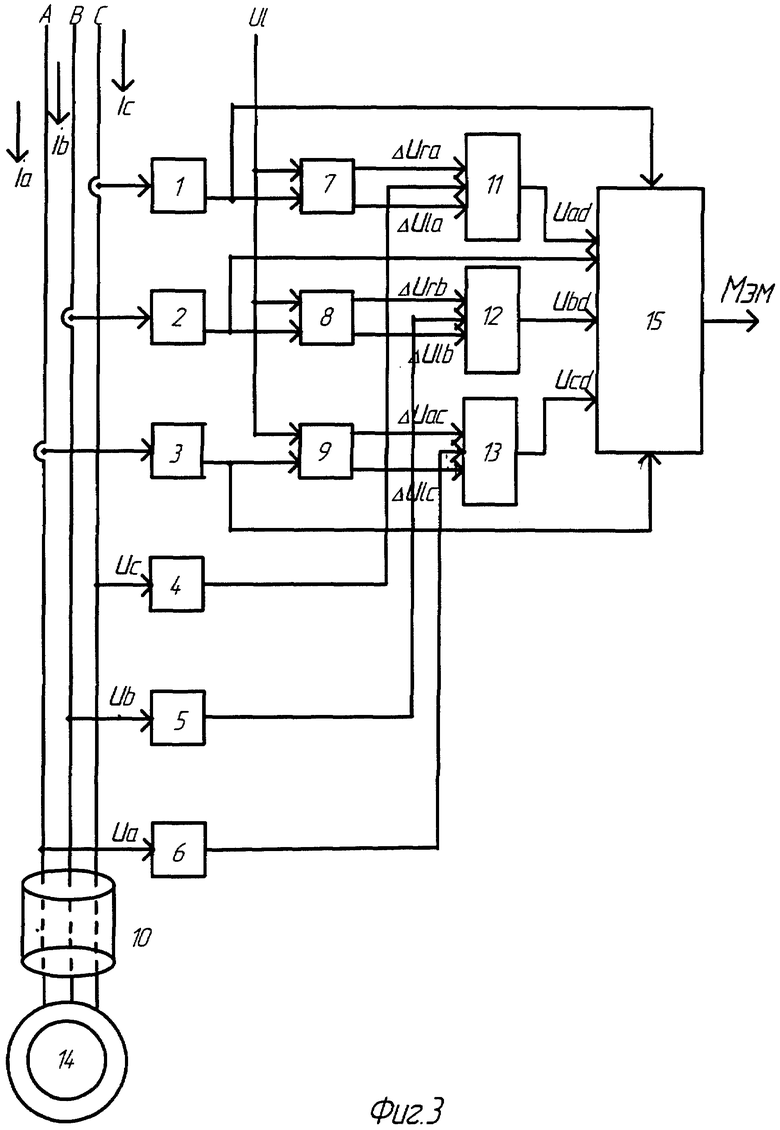
Способ бесконтактного непрерывного определения электромагнитного момента трехфазного асинхронного двигателя в переходных и установившихся режимах работы, по которому измеряют действительные токи и напряжения, по которым вычисляют результирующий вектор потокосцепления статора и результирующий вектор тока статора, а затем определяют электромагнитный момент по зависимости
где ψст - результирующий вектор потокосцепления статора, iст - результирующий вектор тока статора, отличающийся тем, что указанные измерения токов и напряжений осуществляют в фазах сети, питающей асинхронный двигатель, дополнительно измеряют длину кабеля, соединяющего двигатель с сетью, определяют потери фазных напряжений на индуктивном и на омическом сопротивлениях жил кабельной линии, алгебраически суммируют их с действительными значениями одноименных фазных напряжений питающей сети и полученные трехфазные напряжения и измеренные фазные токи питающей сети используют для вычисления результирующего вектора потокосцепления статора и результирующего вектора тока статора.
| СПОСОБ ИЗМЕРЕНИЯ ЭЛЕКТРОМАГНИТНОГО МОМЕНТА ТРЕХФАЗНОГО АСИНХРОННОГО ДВИГАТЕЛЯ | 0 |
|
SU342093A1 |
| СПОСОБ ИЗМЕРЕНИЯ ЭЛЕКТРОМАГНИТНОГО МОМЕНТА АСИНХРОННОГО ДВИГАТЕЛЯ | 1991 |
|
RU2039955C1 |
| СПОСОБ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ЭЛЕКТРИЧЕСКОЙ МАШИНЫ ПЕРЕМЕННОГО ТОКА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1994 |
|
RU2074394C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ЭЛЕКТРОПОГРУЖНЫХ УСТАНОВОК ДЛЯ ДОБЫЧИ НЕФТИ | 2001 |
|
RU2213270C2 |
| Устройство для измерения электромагнитного момента асинхронного двигателя | 1989 |
|
SU1631322A1 |

