1
Изобретение относится к автоматизации технологических процессов и может быть исцользовапо в электродной нромышленности, а также в любой отрасли промышленности для управления реверсивным механизмом, имеющим несколько фиксированных положений, в частности для управления различными раздаточными и дозировочными тележками, а также для управления электромостовыми кранами.
Известны устройства для дистанционного управления с автоматическим выбором направления перемещения объекта, содержащие кнопки управления, датчики положения объекта с двумя рабочими состояниями, исполнительный блок 1.
Недостаток этих устройств заключается в их сложности.
Наиболее близким по технической сущности к изобретению является устройство для дистанционного управления реверсивным механизмом, содержащее датчики положения, реле управления, кнопки управления и обмотки управления реверсивного механизма 2.
Для управления механизмом с помощью известного устройства следует провести несколько операций, т. е. выбор положения, выбор направления движения и, наконец, нажатие кнопки «Пуск. Кроме того, для правильного выбора операций необходимо, чтобы механизм был в поле зрения оператора или, в противном случае, нужно давать дополнительную сигнализацию о положении механнзма.
Предлагаемое устройство позволяет повысить надежность п, кроме того, упростить управление реверсивным механизмом. Оно обеспечивает автоматический выбор направления движения, возможность вынесения управления из зоны видимости движения механизма, что особенно важно в цехах с вредными условиями труда.
Это достигается тем, что устройство содержит параллельные цепочки пз последовательно соединенных кнопки управления, зашунтированной первым замыкающим контактом реле управления, первого размыкающего контакта датчика положения и обмотки реле управления, к одним концам параллельных цепочек подключены одни концы цепочек из последовательно соединенных обмотки управления реверсивного механизма и ее размыкающего контакта, между другими концами которых носледовательно соединены вторые размыкающие контакты датчиков положения, к их точкам соединения подключены одни концы одноименных вторых замыкающих контактов реле управления, другие концы которых соединены с другими концами параллельных
цепочек.
Управление механизмом с помощью устройства производится нажатием кнопки, соответствующей новому положению механизма, а выбор направления движения происходит автоматически.
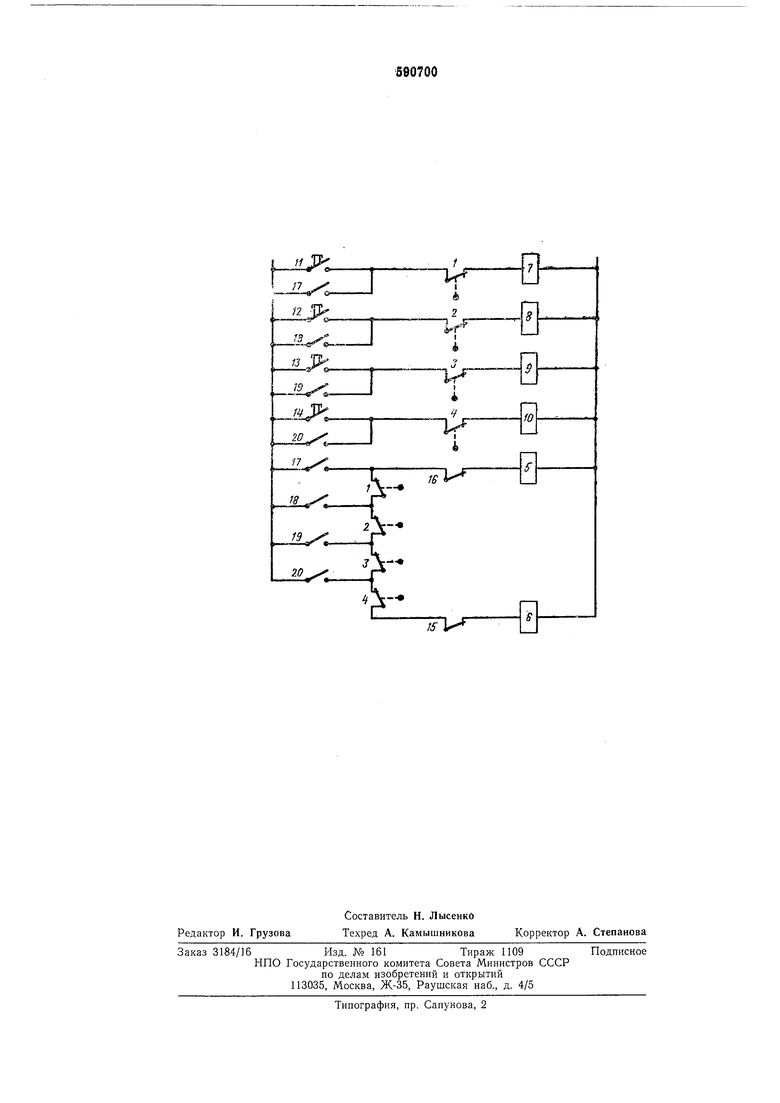
На чертеже представлена принципиальная электрическая схема устройства для дистанционного управления реверсивным механизмом с автоматическим выбором направления движения, где 1-4 - размыкающие контакты датчиков положения; 5-6 - обмотки управления реверсивного механизма; 7-10 - обмотки реле управления; кнопки 11-14 - управления; 15-16 - размыкающие контакты обмоток управления реверсивного механизма; 17-20 - замыкающие контакты реле з равления.
Каждому фиксированному положению механизма соответствует свой датчик, реле управления и кнопка управления. Предположим, что механизм находится в положении «3. Размыкающие контакты 3 датчика положения разомкнуты как в цепи обмоток 5 и 6 управления реверсивного механизма, так и в цепи обмотки 9 реле управления.
При выборе нового положения нажатием кнопки, например 12, через размыкающий контакт 2 датчика положения срабатывает реле управления с обмоткой 8 и замыкает своп контакты 18, подключая именно обмотку 5, так как цепь обмотки 6 реверсивного механизма разорвана контактом 3 соответствующего датчика положения. Двигаясь, механизм контактом 2 соответствующего датчика положения разрывает цепь обмотки 8 реле управления, контакт 18 размыкается, цепь обмотки 5 разрывается, и механизм останавливается.
Движение механизма в другую сторону аналогично.
Устройство может быть составлено для любого количества фиксированных положений механизма.
Предлагаемое устройство позволяет осуществить автоматический выбор направления движения. Схема устройства проста и надежна.
Формула изобретения
Устройство для дистанционного управления реверсивным механизмом, содержащее датчики положения, реле управления, кнопки управления и обмотки управления реверсивного
хмеханизма, отличающееся тем, что, с целью повыщения надежности устройства, оно содержит параллельные цепочки из последовательно соединенных кнопки управления, зашунтированной первым замыкающим контактом реле управления, первого размыкающего контакта датчика положения и обмотки реле управления, к одним концам параллельных цепочек подключены однп концы цепочек из последовательно соединенных обмотки управления реверсивного механизма и ее размыкающего контакта, между другими концами которых последовательно соединены вторые размыкающие контакты датчиков положения, к точкам соединения которых подключены одни концы одноименных вторых замыкающих контактов реле управления, другие концы которых соединены с другими концами параллельных цепочек.
Источники информации,
принятые во внимание при экспертизе
1.Авторское свидетельство СССР №506003, кл. G 05D 3/00, 1973.
2.Авторское свидетельство СССР № 337765, кл. G 05D 3/00, 1970.
l-JLj
15
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для дистанционного управления реверсивным механизмом | 1983 |
|
SU1158972A1 |
| Устройство для дистанционного управления реверсивным механизмом | 1984 |
|
SU1244641A1 |
| Устройство для автоматического выбора направления движения полок элеваторного стеллажа по кратчайшему пути | 1983 |
|
SU1148825A2 |
| УСТРОЙСТВО для ДИСТАНЦИОННОГО УПРАВЛЕНИЯ ГРУППОЙ ДВУХПОЗИЦИОННЫХ ОБЪЕКТОВ | 1973 |
|
SU368704A1 |
| Устройство управления грузоподъемным механизмом | 1982 |
|
SU1134518A1 |
| ФОНД ЗНООЕРТОЗ | 1973 |
|
SU400709A1 |
| Устройство для дистанционного управления реверсивным механизмом | 1986 |
|
SU1383289A2 |
| Устройство для переноса трубных заготовок и его система управления | 1982 |
|
SU1103925A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ РЕВЕРСИВНЫМ ЭЛЕКТРОДВИГАТЕЛЕМ | 1991 |
|
RU2011285C1 |
| Устройство дистационного реверсивного управления забойной машиной | 1980 |
|
SU972091A1 |