Изобретение относится к оёпасти автоматики, телемеханики и вычислительной техники н может быть использовано в высокоточных системах .передачи и кодирования угла поворота вала.
Известны преобразователи угла поворота вала, в фазовый сщвиг двух напряженки LIJ , содержащие фазоврашатели, соединенные с входным валом псхзреаством редукторов с заданными передаточными, числами, выходы фазовращателей подключены к одним входам фазовых дискриминаторов, к друпгм входам которых подключен источник опорного сигнала.
Недостатком известного преобразовав геля является его сложность, вызванная необходимостью применения для питания фазовращателей напряжений разнсй частоты.
Наиболее близким решением является преобразователь 2, содержащий параметрический датчик угла, ротор которого соединен с контролируемым валом, а ротор модулятора соединен с приводным
двигателем, выход роторной обмотки параметрического датчика угла соедШ1ен с первыкти входами фазоььтх дискриминаторов.
Недостатками известного преобразователя является его низкая помехоустойчивость и точность, вызванные невысоким отношением полезного сигнала к частоте модуляции.
Целью изобретения является повьпие- ние помехоустойчивости и точности преобразователя.
Это достигается тем, что в него вве дены фазовращатели,, соединенные с валом модулятора через повышающий и по« нижаюший редукторы с передаточными числами fj () и12-(1 ) соответственно, где О 1 / 4- , выход параметрического датчика угла соединен со .входамифазовращателей, выходы которых подключены к вторым входам фазовых дискрим1таторов.
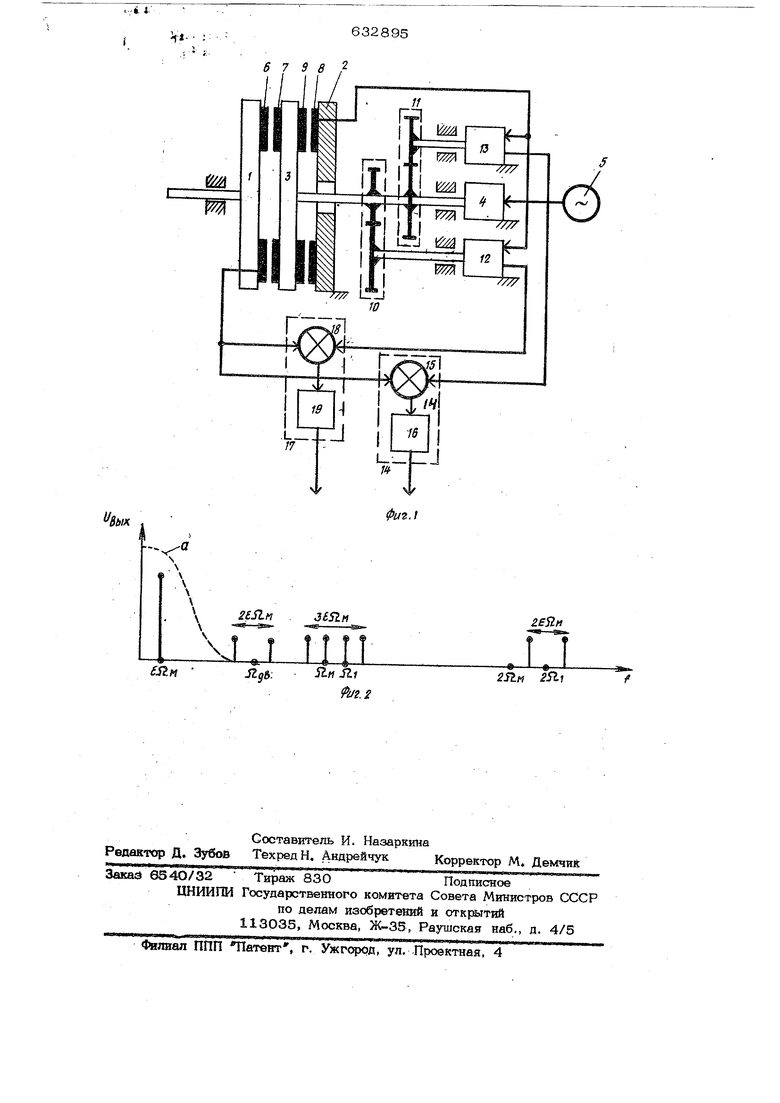
На фиг. 1 приведена функциональная схема предложенного преобразователя; на 363 фиг. 2 представлен спектр частот etX5 вьгходного сигнала. Преобразователь (см. фиг. 1) содержит ротор 1, сопрягаемый с валом, угол поворота которого необходимо измерять, статор 2 и модулятор 3, установленный на валу приводного двигателя 4 (например, синхронного), подключенного к иС точнику питания 5, На роторе 1 помете на, например, многополюсная обмотка 6 с числом пар полюсов р7 взаимодействующая с обмоткой 7 модулятора 3 с числом пар полюсов р. На статоре 2 поме щена обмотка 8 с числом пар полюсов (р) или (), взаимодействующая с аналогичной обмоткой 9 на модуляторе 3„ Одноступенчатые редукторы 10 и 11 выполнены с передаточнь ми отноше шями соответственно -t 1 а 14S к ,- () Где О- /4. Входные зубчатые колеса редукторов установлены на валу модулятора 3, а выходные - соответственно на валах фазовращателей 12 и 13, установленных на корпусе преобразователя, Входы фазовращателей 12 и 13 подключены к обмотке 8 статора. Выход фазовращате ля 13 подключен к одному из входов фа-зового дискриминатора 14, к другому входу которого подключена обмотка 6 ро тора. Фазовый дискриминатор 14 составлен из синхронного детектора 15 и фильт ра высоких частот 16, выход которого является первым выходом преобразователя. Выход фазовращателя 12 подключен к одному из входов второго фазового дис криминатора 17, к другому входу которого параллельно со входом фазового дис криминатора 14 подключена обмотка 6 ротора. Фазовый дискриминатор 17 составлен из сзинхронного детектора 18 и фюштра 1 9, аналогичных элементам 15 и 16. Выход фильтра 19 является вторым выходом преобразователя. Преобразователь работает следующим образом. При подключении обмоток моду. лятора к источнику повышенной частоты (на чертеже не показан) и вращении моду лятора 3 со скоррс гью оборотов в секунду HiacTora i напряжения, снимаемь го с обмотки 8 статора с числом пар полюсов (р 4- 1) будет равна f.n(pUl. Частота напряжевия ig , снимаемого о обмотки 6 пар вращении 1 со скоростью М оборотов в секунду будет равна iV(N)p.(2) Напряжение статора поступает на входы фазовращателей 12 и 13, роторы которых через редукторы 10 и 11 с передаточными отношениями t и 1 вращаются от вала .модулятора 3. Частота i напряжения на выходе фаовращателя 12 будет равна f2,, где ij. -(l-el. Частота д напряжения на выходе фазовращателя 1 3 будет равна (4) где 42--(i)Частота ig напряжения на выходе дискриминатора 17 будет равна а частота I,«, напряжения на выходе дискри;и-инатора 14 будет равна б 2-14С учетом выражений (1), (2), (З) и (4) равенства (5) и (б) можно запи сать в виде 5 nS-Np-, ;,. Относительное изменение частоты i относительно частоты ig будет равно P i,-f5.2pW. (9) Умножив обе части равенства (9) на 23 i , где t - время, получим 21lPt«2p-2ftKi ийи срг2р (10) колеса редуктора и ротора фазовращате-ля, от второй гармоники погрешности фазовращателя Z9.€u И 2Л1-ейц Таким образом, для фильтрашпй сигнала преобразователя достаточно использования простейшего фильтра низких чаотот типа интегрирующего звена из емкости и резистора. Требуемая амплитуд- но-частотная характеристика фильтра
представлена на фиг, 2 пунктирной кривой.
К погрешностям редукторов 10 и 11 j а также фазовращателей 12 и 13 не предъявляется высоких требований, так как основные паразитньге составляющие выходного сигнала, обусловленные этими погрешностями, лежат в высокочастотной области и отфильтровываются. Однако нельзя считать, что допускается любое значение погрешности редуктора и фазовращателя, так как в приведенном на фиг. 2 спектре частот не учтены составляющие высших порядков малости. Так, например, не учитывается ввод малости второго порядка составляющая, амплитуда которой if j равна произведению погрешности S I редуктора на погрешность So фазовращателя, т.е.
При о угл.мин. О,О06 радиана, угл, мин. О,ООЗ радиана, погреигаость, внесенная в датчик, определенная по формуле 2 3 JS. , при р 1ОО будет равна
,0,.ceM.
Применение преобразователя в системах передачи и кодироватш угла поворота вала позволит повысить точность измерения При этом электронная аппаратура датчика существенно ущзсяцается ввиду устранения высокостабилыгых избирательных фильтров и устройства стабилизации скорости вращения приводного двигателя.
Фор-мула изобретения
Преобразователь угла поворота вала в фазовый сдвиг двух.напряжений, содержащий параметрический датчик угла, ротор которого соединен с контролируемым валом, а ротор модулятора соединен с приводным двигателем, выход роторнсй обмотки параметрического датчика угла соединен с первыми входами фазовых диС кримш1аторов, отличающийся тем, что, с целью повьтшетгя помехоустойчивости и точности преобразователя, в него введены фазовращателя, соединенные с валом модулятора через повышающий и пош1жающий редутсгорьг с передаточными чнслакт i j (14 ) м { 2 {1 - ) соответственно, где О 1/4 выход параметрического датчика угла соединен со входами фазовращателей, выходы которых подключены к вторым вхо- дам фазовых дискриминаторов.
Источники «({формации, принятые во внимание при экспертизе:
1.Патент ФРГ № 1566760, кл. 74 в 8/02, 22.10.76.
2. Авторское свидетельство СССР № 343286, кл. Q 08 С 9/04, 31.05.68.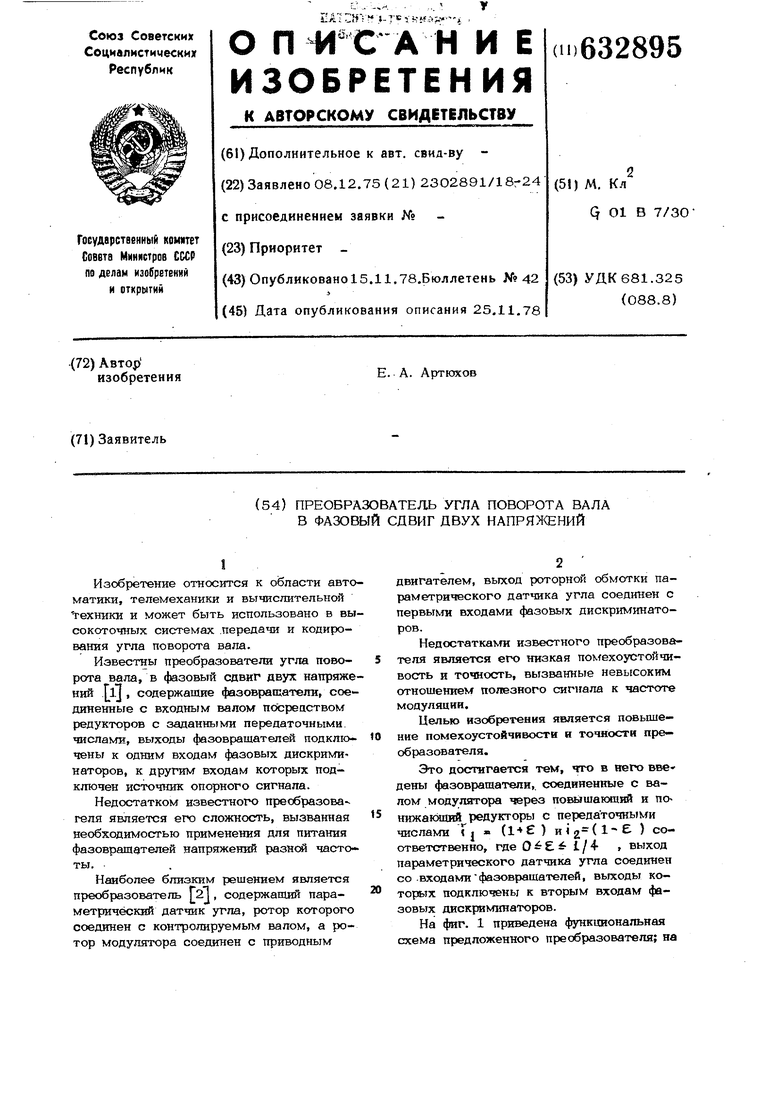
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения малых угловых скоростей | 1976 |
|
SU591767A1 |
| Устройство для контроля многополюсных вращающихся трансформаторов | 1979 |
|
SU868815A1 |
| Устройство контроля следящей системы передачи угла | 1976 |
|
SU651398A1 |
| Фазовая следящая система | 1975 |
|
SU543973A1 |
| Устройство для задания угла поворота | 1979 |
|
SU849269A1 |
| Преобразователь угла поворота вала в фазовый сдвиг | 1979 |
|
SU855396A1 |
| Фазовая следящая система | 1976 |
|
SU779970A1 |
| Устройство для преобразования угла поворота вала в код | 1974 |
|
SU610148A1 |
| Преобразователь кода в угловое положение вала | 1983 |
|
SU1088048A1 |
| Фазовая система для преобразованияуглА пОВОРОТА B КОд | 1979 |
|
SU842901A2 |