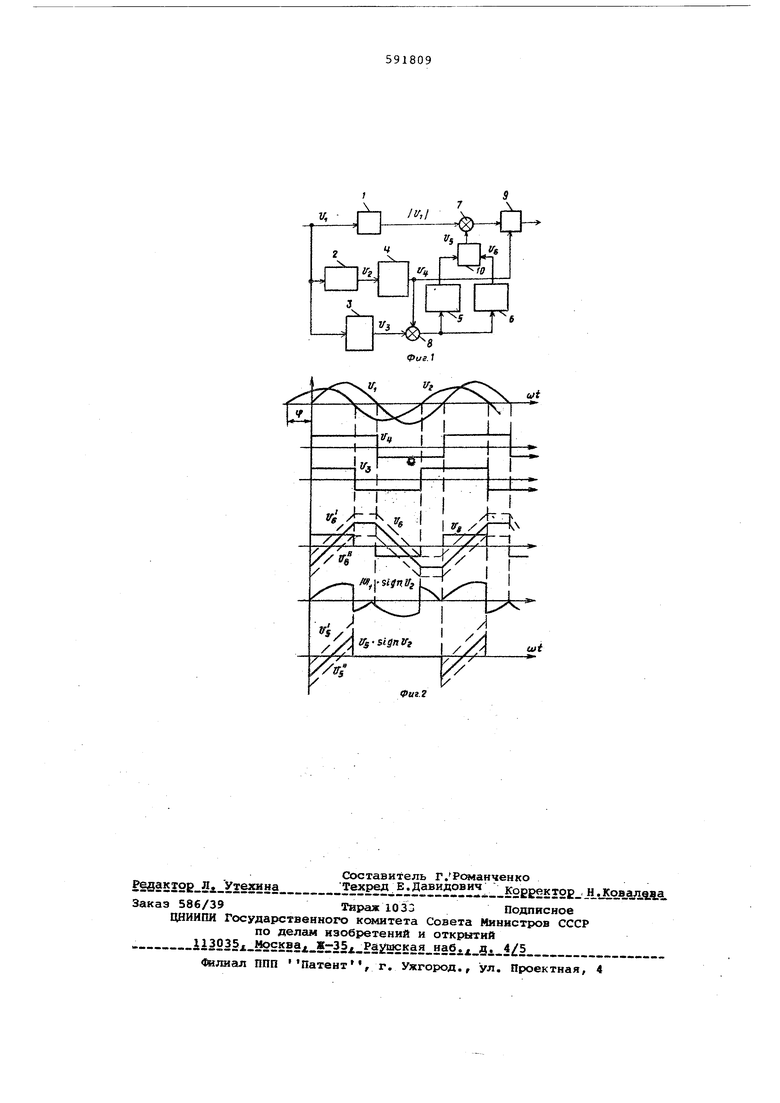
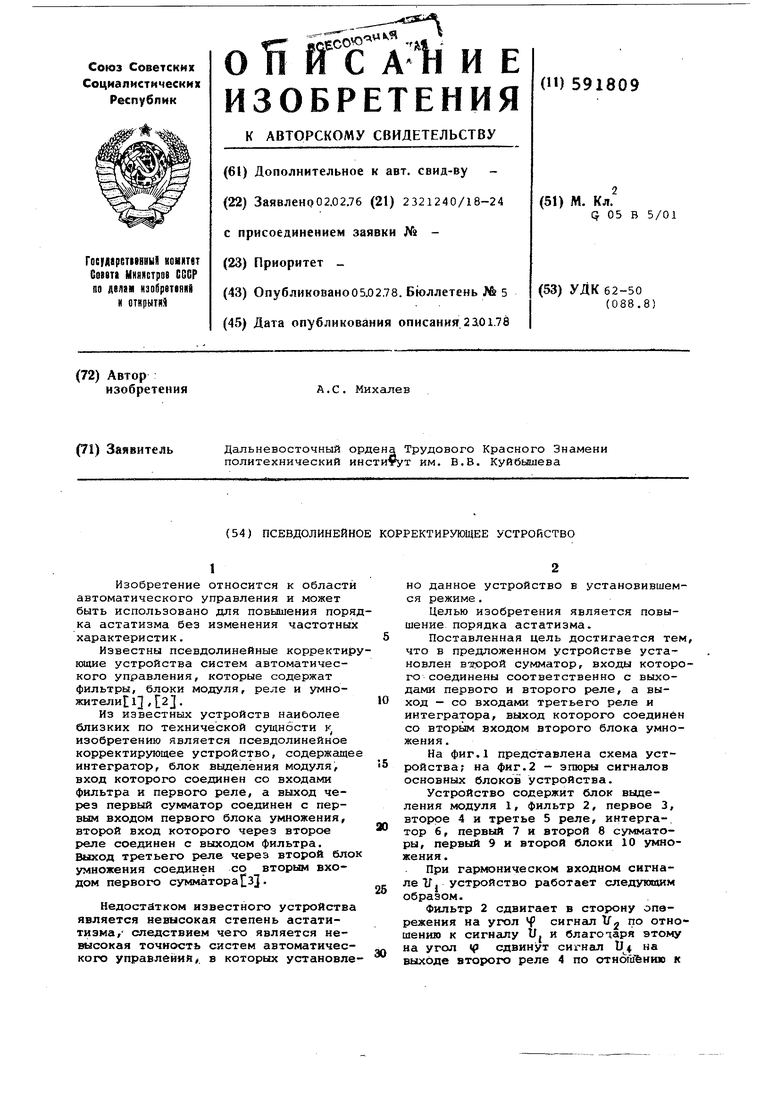
(54) ПСЕВДОЛИНЕЙНОЕ КОРРЕКТИРУЮЩЕЕ УСТРОЙСТВО сигналу Ifj на выходе первого реле 3, поэтому выходной сигнал иg сумматора 8 приобретает вид симметричных разнополярных импульсов , показанных на фиг. 2. В результате сигнал U на выходе интегратора имеет также сим метричную трапецеидальную форму. Интегратор 6 с помощью однополярного реле 5 и блока умножения 10 подключается ко входу сумматора 2 лишь на тех интервалах времени, когда сигнал 1Г„ положителен и поэтому его коМНонента на выходе устройства имеет вид сигнала 11, (сплошная линия на фиг.2). Таким образом, при отсутствии постоянной составляющей в сигнале и , сигнал и 2 симметричен, и его разложение в ряд Фурье не дает первой гармоники на выходе устройства. В связи с этим наличие интегратора в составе устройства не изменяет его частотную характеристику, а следовательно, и не влияет на устойчивость корректируемой системы. Характеристики предлагаемого уст ройства, также, как и известных псев долинейных устройств в этом случае определяются сигналом (ttj) bigrt 1S В процессе управления в сигнале U появляются постоянные составляющие, которые приводят к несимметричности сигналаЦдИ, следовательно, к смещению сигнала U в положение XJ или U в зависимости от знака .рассогласования (пунктирные кривые на фиг.2) В результате этого сигнал 1/5 также смещается в положение 1) g или Uj до тех пор, пока его постоянная составляющая на выходе устройства не исклю чит по цепи обратной связи корректируемой системы постоянную составляющую в сигнале -tTj т.е. постоянную составляющую ошибки системы. Таким образом, в процессе управления проявляются интегрирующие свой ства устройства, т.е. астатический характер его работы. Анализируя принцип действия описанного устройства, нетрудно заметит что повышение порядка астатизма осн вано на асимметрировании его статической характеристики с стомощью дополнительного интегрирующего канала, выход которого при одной полярности автоколебаний подключается, а при другой - отключается. Таким образом в принцип действия устройства уже заложен автоколебательньй характер работы систекы. Может оказаться, что указанные автоколебания имеют недопустимо большую амплитуду и низкую частоту. Чтобы исключить этот недостаток, достаточно охватить сумматор 8, реле 3 и 4 и фильтр 2, отрицательной инерционной обратной связью и, таким образом, обеспечить в образовавшемся контуре автоколебания наперед згидаиной амплитуде. Принцип действия устройства при этом остается прежним, увеличивается лишь частота подключений интегрирующего элемента 6 к сумматору 7, а следовательно, уменьшается амплитуда автоколебаний в системе . Таким образом, благодаря предложенной структуре устройства удается полностью исключить постоянную составляющую ошибки в корректируемой системе, т.е. увеличить ееточность. Формула изобретения Псевдолинейное корректирующее устройство, содержащее интегратор, блок вьщеления модуля, вход которого соединен со входами фильтра и первого реле, а выход через первый сумматор соединен с первым входом первого блока умножения, второй вход которого через второе реле соединен с выходом фильтра, выход третьего реле через второй блок умножения соединен со вторым входом первого сумматора, о т л и ч а юBJ е е с я тем, что, с целью повышения порядка астатизма устройства, в нем установлен второй сумматор, входы которого ссэдинены соответственно с выходами первого и второго реле, а выход - со входами третьегореле и интергатора, выход которого соединен со вторым входом второго блока умножения. Источники информации, принятые во внимание при эксперзсиЭе: 1.Нелинейные корректирующие устройства в системах автоматического управления, под. ред. Ю.И. Топчеева, Машиностроение, 1971, стр. 15. 2.Заявка 2024128/24 от 15.05.74, по которой принято положительное решение. 3. Хлыпало Е.И. Нелинейные корректирующие устройства в автоматических системах. Энергия, 1973., стр. 10.
М УТУГ xxs
/
| название | год | авторы | номер документа |
|---|---|---|---|
| Псевдолинейное корректирующее устройство | 1978 |
|
SU748340A1 |
| Псевдолинейное корректирующее устройство | 1977 |
|
SU628457A1 |
| Нелинейное корректирующее устройство с фазовым опережением | 1988 |
|
SU1718182A1 |
| Нелинейное корректирующее устройство | 1978 |
|
SU750421A1 |
| Нелинейное изодромное корректирующее устройство | 1978 |
|
SU767699A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ АСТАТИЧЕСКОГО ОБЪЕКТА | 1996 |
|
RU2103714C1 |
| Псевдолинейное корректирующее устройство | 1982 |
|
SU1103197A1 |
| Псевдолинейное корректирующее устройство для систем управления | 1982 |
|
SU1076870A1 |
| Псевдолинейное корректирующее устройство | 1976 |
|
SU640248A1 |
| СЛЕДЯЩИЙ ЭЛЕКТРОПРИВОД | 1990 |
|
RU2015519C1 |