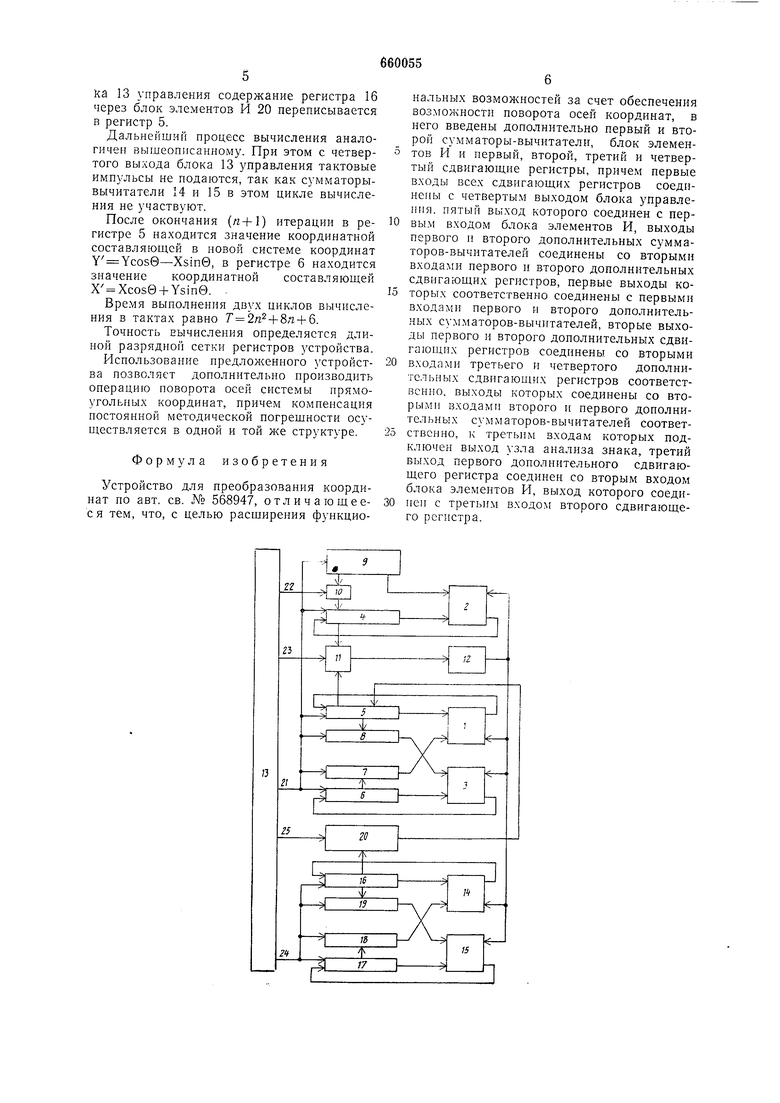
ющие регистры, причем первые входы веех сдвигающих регистров соединены с четверTtjiM выходом блока управления, пятый выход которого соединен с первым входом блока элементов И, ВЕЛХОДЫ первого и второго дополнительных сумматороввычитателей соединены со вторыми входами нервого и второго дополнительных сдвигающих регистров, первые выходы которых соответственно соединены с первыми входами нервого и второго дополнительных сумматоров-вычитателей, вторые выходы первого и второго дополнительных сдвигающих регистрОЕ; соединены со вторыми входами третьего и четвертого дополнительных сдвигающих регистров соответственно, выходы которых соединены со вторыми входами второго и первого дополнительных сумматоров-вычитателей соответственно, к третьим входам которых подключен выход узла анализа знака, третий выход первого дополнительного сдвигающего регистра соединен со вторым входом блока элементов И. выход которого соединен с третьим входом второго сдвигающего регистра. На чертеже нредставлена блок-схема устройства для нреобразования координат. Устройство содержит сумматоры-вычитателн 1-3, сдвигающие регистры 4-8, блок 9 памяти, элемент И 10, коммутатор 11, узел 12 анализа знака, блок 13 управления, донолнительные сумматоры-вычитатели 14, 15, дополнительные сдвигающие регистры 16-19 и блок элементов И 20, выходы 21-25 блока 13 управления. Входом устройства для координатной составляющей X является вход сдвигающего регистра 5. Входом устройства для координатной составляющей Y является вход сдвигающего регистра 17. Входом устройства для угла, на который поворачиваются оси координат, является вход сдвигающего регистра 4. Выходом устройства для координатной составляющей X является выход сдвигающего регистра 6, для координатной составляющей Y-выход сдвигающего регистра 5. Вычисление результата операции новорота осей систем координат осуществляется в два цикла. В первом цикле вычисления производится компенсация постоянной методической погрещности, т. е. деформация вектора, заданного координатными составляющими X и Y, в /(„ П / +2-2j/i/2 раз, путем дополнительного поворота на сумму угловых констант вида aj arctg2-J, равную величине ф агс sinl/K,i по алгоритму е. :ср Qj., . . „ ( +1 при 9. 0.. sign в.. 1 -1 при в.0. Y, Yi.,qjX;2-i ./СДс05Йо. Х,:::.0 Xj,, , .:: Xj , Х;К,. 1/„-:У Vi. 1/„ А„Усо8Й,. 2„:.0 Zj.,.::Z +qy/2-- 2„-:-У//Г„. Работа устройства в первом цикле вычисления выполняется следующим образом. Первоначально в регистр 4 из блока 9 памяти через элемент И 10 заносится значение ф arc (/,, з регистр 5 заносится аргумент X, в регистр 17 заносится аргумент Y. Содержания регистров 6-8, 16, 18-19 равны нулю. Вход узла 12 анализа знака соедииен со знаковым разрядом регистра 4. Поступающие с первого и четвертого выходов блока 13 управления тактовые импульсы в виде последовательности (серии) в каждой итерации сдвигают содержания регистров 7, 8, 18 и 19, продвигают содержания регистров 4-8, 16-19 на входы сумматоров-вычитателей 1-3, 14 и 15 и поразрядно продвигают со второго выхода блока 9 памяти на второй вход сумматора-вычитателя 2 очередную константу. С выходов сумматоров-вычитателей полученные результаты записываются младшими разрядами вперед в освобождающиеся при сдвиге старщие разряды регистров 4-6 и 16, 17 и продвигаются к их началу. В соответствии со знаком содержания регистра 4 узел 12 анализа знака устанавливает режим работы сумматоров-вычитателей на следующей итерации. При положительном знаке сумматоры-вычитатели 1, 2 и 15 работают в режиме вычитания, а сумматорывычитатели 3 и 14 - в режиме сложения. При отрицательном знаке их режим работы изменяется на обратный. После выполнения (П+1) итераций по (и+т) тактов каждая, где п - число разрядов аргумента, т - число дополнительных разрядов для компенсации усечения чисел при сдвиге, в регистре 4 находится нулевое значение, в регистре 6 - значение деформированной координатной составляющей X, в регистре 16 - значение деформированной координатной составляющей Y. Во втором цикле вычисления производится собственно поворот осей системы коордипат по алгоритму Волдера в е,-.1 9, . „ ( +1 при в sO а i sign в , - 1 при . Y, YIK У;ч1 УП-УY, X/K X,, Xj + q.Y,2-J Х„-.х. Первоначально в регистр 4 заносится аргумент 8 - угол, на который требуется повернуть оси системы координат, содержания регистров 6 и 16 оставляют без изменений. По сигналу с пятого выхода бло
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для вычисления тригонометрического тангенса | 1973 |
|
SU537344A1 |
| Двоичное устройство деления | 1975 |
|
SU541171A2 |
| Устройство для вычисления логарифмической функции | 1973 |
|
SU541167A1 |
| Устройство для преобразования координат | 1974 |
|
SU568947A1 |
| Цифровой функциональный преобразователь | 1975 |
|
SU607223A1 |
| Устройство для вычисления функции вида ух | 1975 |
|
SU579612A1 |
| Устройство для возведения в степень | 1975 |
|
SU616628A1 |
| Устройство для вычисления корня -ой степени | 1977 |
|
SU742929A1 |
| Цифровой функциональный преобразователь | 1975 |
|
SU586458A1 |
| Устройство для вычисления обратного кругового синуса | 1973 |
|
SU478313A1 |
