(54) УСТРОЙСТВО ДЛЯ ПОЛУЧЕНИЯ КРИВОЛИНЕЙНЫХ ТРАЕКТОРИЙ
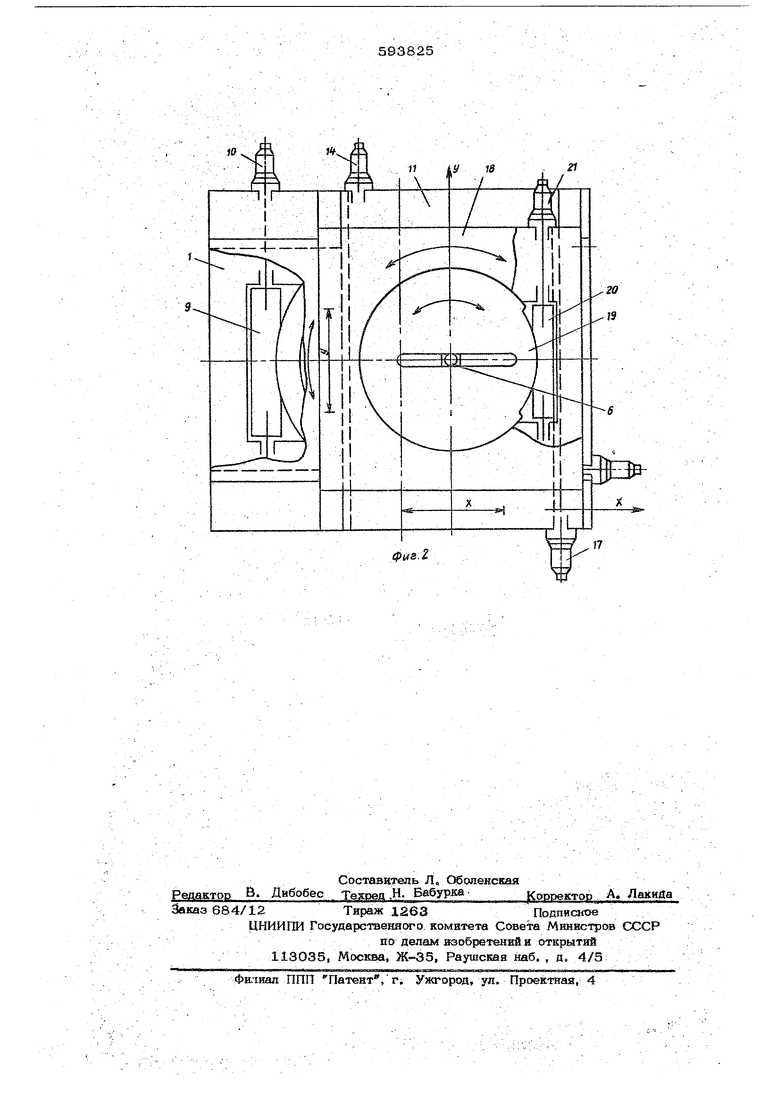
ляюшим 8 перемешается каретка Ц. В каретке 11 установлен диск 12 со сквозным пазом. Диск 12 получает круговое движени от червяка 13, который взаимодействует с приводом 14, закрепленным на каретке
-11. На каретке установлены направляющие 15, круговое двиладние которых осуществляют червяком 16, взаимодействующим с приводом. 17., установленным на каретке 11. По направляющим 15 прямолжешш
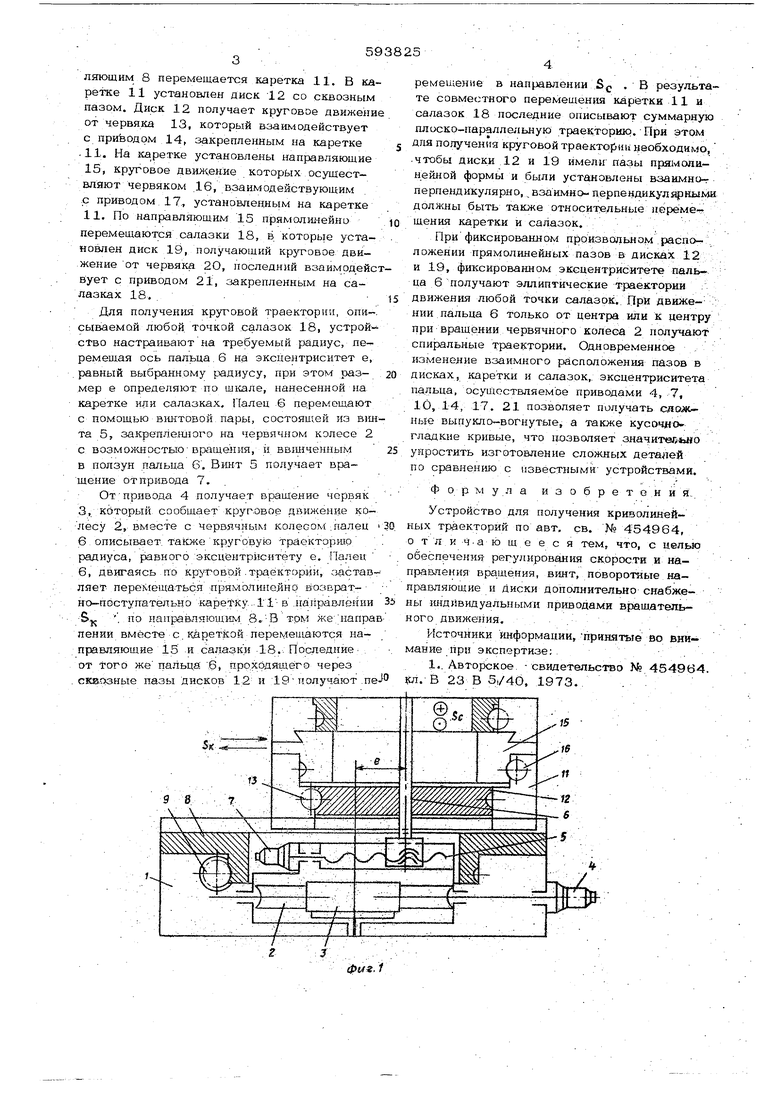
перемещаются салазки 18, в. которые установлен диск 19, получающий KpjTOBoe движение от червяка 2О, последний взаимодейсвует с приводом 21, закрепленным на салазках 18..Для получения круговой траектории, спи.сьгваемай любой, точкой .салазок 18, устройство настраивают на требуемый радиус, перемешая ось пальца. 6 на эксцентриситет е, равный выбранному радиусу, при этом размер 8 определяют по , нанесенной на каретке или салазках. Палец 6 перемещают с помощью BiiHTOBoft пары, состоящей из винта 5, закрепленного на червячном колесе 2 с возможностью-вращения, и вв1Шченным
в ползун пальца 6. В}шт 5 получает вращение от привода 7. .
Отпривода 4 получает вращение червяк 3, кйтррый сообщает круг-овое движение колесу 2, вместе с червячным колесом .палеи 6 описывает. Также круговукэ трйекторшр радиуса, равного эксцентриситету е. Палец 6, двигаясь по круговой .Т5эаек-гории, заставляет перемещаться прямолш1ейнс нозвратно-поступательно каретку .11- в .направлении By. . по направляющ - том же ;наоралений вместе с. кддеткой перемещаются направляющие 15 и салазки 18. Последние-. от того же цальцй ,6, про.ходящёго через . сккозные пазы дисков 12 и 19-получают .ne
5х
ремешение в направлении ..(, . В результате совместного перемещения каретки 11 и салазок 18 последние описывают суммарную плоско-параллельную траекторшо. При этом дпя получения круговой траектории необходимо, -чтобы ДИСК.И 12 и 19 имели пазы прямоли- н ейной формы и были установлены взаимно-г перпендикулярно, взаимно- дерпендикуляркылда должны быть также относите.льные переме-гщения каретки и салазок.
Прификсированном произвольном .распо-. ложении прямолинейных пазов в дисках 12 и 19, фиксированном эксцентриситете паль-. ца б получают эллиптические траектории : движения любой точки салазок.. При движе-НИИ пальца 6 только от центра или к центру при вращении червячного колеса 2 получают спиральные траектории. Одновременнсю . изменение взаимного расположения низов в дисках, каретки и салазрк,. эксцентриситета па.льца, осущоствляемое приводами 4, 7, 10, 14, 17. 21 позволяет получать слож- ны-е выпукло-вогнутые, а также кусочно гладкие кривые, что позволяет значительно упростить изготовление сложных д.вталей по сравнению с известными устройствами.
Формула изобретени я..
Устройство для получе.ния криволинейных траекторий по авт, св. № 454964, о т ли ч-а ю ш е е с я тем, что, с целью обеспечения- регулироващия ск.орос.ти и направления вращения, винт, поворотные направляющие и диски дополнительно снабжены 1шдйвидуальными приводами вращательного движения. .
Источники информации, принятые во внимание при экспертизе;, .
1.. Авторское -свидетельство № 454964. кл.В 23 В 5I/4D, 1973... Iff
Zi
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для получения криволинейных траекторий | 1974 |
|
SU512860A2 |
| УСТРОЙСТВО ДЛЯ ПОЛУЧЕНИЯ КРИВОЛИНЕЙНЫХ ТРАЕКТОРИЙ | 1973 |
|
SU406643A1 |
| Устройство для обработки контактных линз | 1974 |
|
SU618196A1 |
| Устройство для получения криволинейных траекторий | 1975 |
|
SU539687A2 |
| Устройство для получения криволинейных траекторий | 1974 |
|
SU516469A2 |
| Устройство для получения криволитейных траекторий | 1975 |
|
SU563222A2 |
| УСТРОЙСТВО ДЛЯ ПОЛУЧЕНИЯ КРИВОЛИНЕЙНЫХ ТРАЕКТОРИЙ | 1972 |
|
SU426753A1 |
| Устройство для получения криволинейных траекторий | 1975 |
|
SU607655A2 |
| Устройство для получения криволинейных траекторий | 1973 |
|
SU454964A2 |
| Устройство для обработки деталей со сложным контуром | 1976 |
|
SU655477A1 |