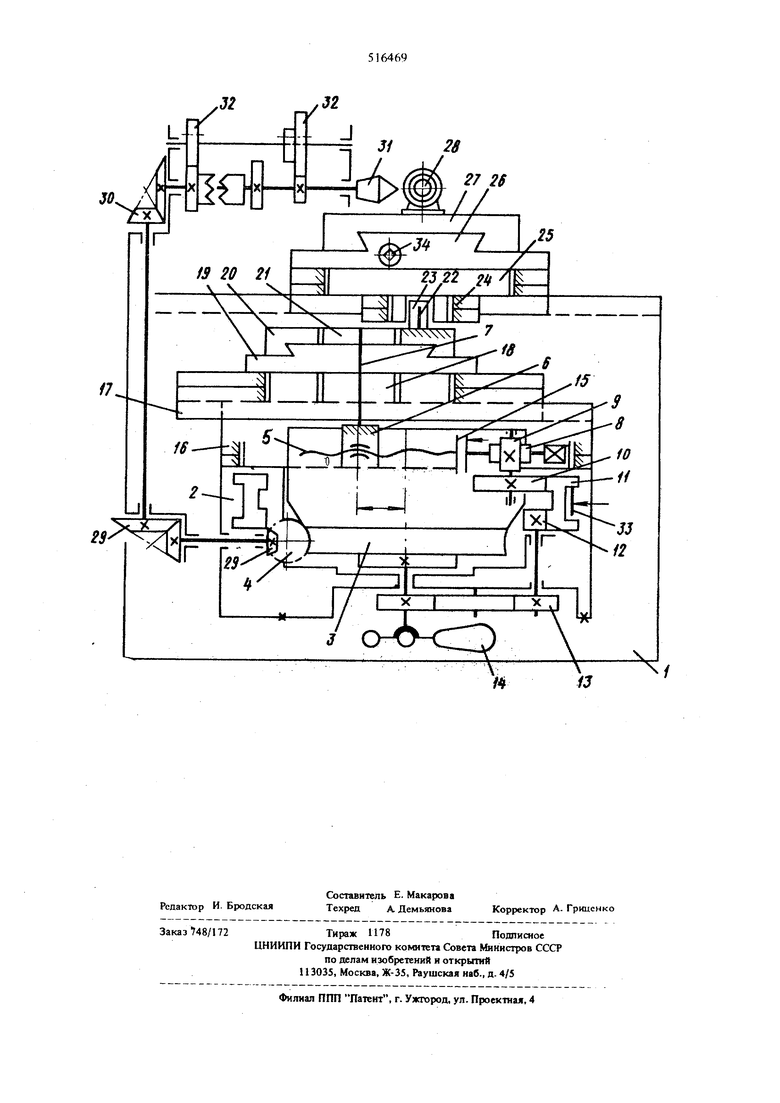
портом 27 и инструментальным приводом 28. Конец червяка 4 через зубчатые колеса 29 и 30 кинематически связан со шпинделем 31, несущим деталь. Коробка скоростей 32 служит для изменения скорости вращения ншинделя 31, а тормоз 33 - для фиксащш блока зубчатых колес 11. Винт 34 предзизначен для перемещеьдая гюперещюго суппорта 27. Устройство работает следующим образом. Для обработки заготовки кулачка, закренленной на шпинделе 31 по замкнутому профилю, необходимо, чтобы вращение червячного колеса 3 и шпивделяЗ было кратным или равным. Кратность вращения червячного колеса 3 и шпинделя 31 достигается выбраннььм передатовдым отношением конических зубчатых колес 29 и 30 и коробки скоростей 32, при зтом муфта 15 и гитара 13 должны быть выключены. После настройки требуемого передаточного отноше1шя вращения шпинделя 31 и червячного колеса 3 винтом 5 перемещается ползун 6 с пальцем 7 на требуемый эксцентриситет о. Приводим в движение червяк 4, от которого получает движерше червячное колесо 3 с пальцем 7, движущимся по круговой траектории. Палец 7 через сквозные пазы в дисках 18 и 21, которые вставлены в каретку 17 и салазки 20, сообщает последним возвратно-поступательные движения. Сложные строго перпендикулярные движения каретки 7 и салазок 20 обеспечивают получение замкнутой траектории на любой точке салазок 20 и пальце 22. Для получения круговой траектории на любой точке салазок 20 необходимо, чтобы прямолинейный паз в диске 18 был установлен строго перпендикулярно движению каретки 17, при зтом эксцентриситет е будет радиусом полученной круговой траектории на любой точке салазок. На салазках 20 жестко закреплен палец 22 с подвижно установленным ползуном 23, который, перемещаясь по пазу поворотной планки 24, закрепленной к продольному суппорту 25, сообщает ему прямолинейное возвратно-поступательное движение по величине, равное 2е в каждую сторону, но при зтом прямолинейный паз в планке 24 должен быть установлен строго перпендикулярно движению продольного суппорта 25. Для изменения величины и закона движения продольного суппорта 25 без изменения эксцентриситета достаточно изменить положение паза в планке-24 шш в кдретке 17. Если паз в каретке 17 установлен под углом к ее движению, а в салазках 20 прямо;штйный паз установлен перпендикзлярно движению, тогда сложенное перпендикулярное движение каретки 17 н салазок 20 обеспечивает получение замкнутой траектории - эллипса на любой точке салазок. Эллиптическая траектория дает возможность также изменять величину и закон движения продольного суппорта 25 за счет поворота iianpaBляющих 16. При этом перемещение продольного сугагорта 25 возможно по.большой или малой оси, или их промежуткам. При необходимости получить продольным суппортом 25 более сложного закона движения, например когда любая точка салазок 20 описьгаает спиральную траекторию, в устройстве необходимо включить муфту 15, а тормоз 33 отклюадть, если гитара используется для изменения скорости вращения винта 5. При замене прямолинейных пазов на криволинейные также возможно изменение закона движения продольного суппорта 25. Одновременно с вращением червячного колеса 3, вращаемого червяком 4, получает вращение и шпиндель 31 через конические колеса 29 и 30. Сложе1шые поворотные движения щпинделя 31 и осевое прямо.гшнейное возвратно-поступательное перемещение продольного суппорта 25 с инструментом позволяет получить замкнутьш профиль на заготовке кулачка. При передаточном отношении враще1шя шпинделя 31 и червячного колеса 3, равном единице, замкнутый профиль на заготовке кулачка обрабатьшается за полный оборот шпинделя 31 и червячного колеса 3. Если передаточное отношение не равно единице, то за один оборот шпинделя 31 червячное колесо 3 должно совершить полное число оборотов, равное выбранному передаточному отношению. На требуемую глубину резания винтом подачи 34 по направляющим 26 перемещают поперечный суппорт 25 с приводом инструмента 28. Для устаювки инструмента (фрезы) под требуемым углом относительно оси шпинделя 31 с заготовкой служат поворотные направляющие 26. Формула изобретения Устройство для получения криволинейных траектортй по авт. св. № 426753, отличающеес я тем, гго, с целью расширения технологических возможностей устройства, например обработки ииливдрических кулачков, че|5вяк устройства кинематически связан со шпинделем, несущим деталь, а на салазках дсяюлнительно закреплен стержень, на который установлен инструментальный ползун, при этом на последнем закреплена поворотная планка, в которой вьшолнен паз для ссэтряжения со стержнем.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для получения криволинейных траекторий | 1974 |
|
SU512860A2 |
| Устройство для обработки контактных линз | 1974 |
|
SU618196A1 |
| СТАНОК ДЛЯ ОБРАБОТКИ АРОЧНЫХ ЗУБЬЕВ ЦИЛИНДРИЧЕСКИХ КОЛЕС | 1997 |
|
RU2123915C1 |
| •СЕСОЮЗНАЯ ffATEHTW-TEXl'i-'JECHAH | 1973 |
|
SU381480A1 |
| УСТРОЙСТВО К ТОКАРНОМУ СТАНКУ ДЛЯ ОБРАБОТКИ ВИНТОВОЙ ПОВЕРХНОСТИ | 2003 |
|
RU2253545C1 |
| Устройство для шлифования профильных валов с равноосным контуром | 1983 |
|
SU1140937A1 |
| ЧЕРВЯЧНАЯ ПЕРЕДАЧА, СПОСОБ ЕЕ ИЗГОТОВЛЕНИЯ, ОБОРУДОВАНИЕ И ИНСТРУМЕНТ ДЛЯ ЕЁ ВЫПОЛНЕНИЯ | 1998 |
|
RU2200262C2 |
| Устройство для получения криволитейных траекторий | 1975 |
|
SU563222A2 |
| МНОГОФУНКЦИОНАЛЬНЫЙ ТОКАРНЫЙ СТАНОК | 1996 |
|
RU2103114C1 |
| Устройство к токарно-винторезному станку для нарезания винтов с переменным шагом | 1982 |
|
SU1038125A1 |