ти и длина выбираемой части подъемного каната и операционный усилитель L3J.
Известное устройство осуществляет непрерывное измерение загрузки, однако вследст вне применения операционных усилителей в режиме интегрирования и упрошенного алгоритма вычислений обладает пониженной точностью.
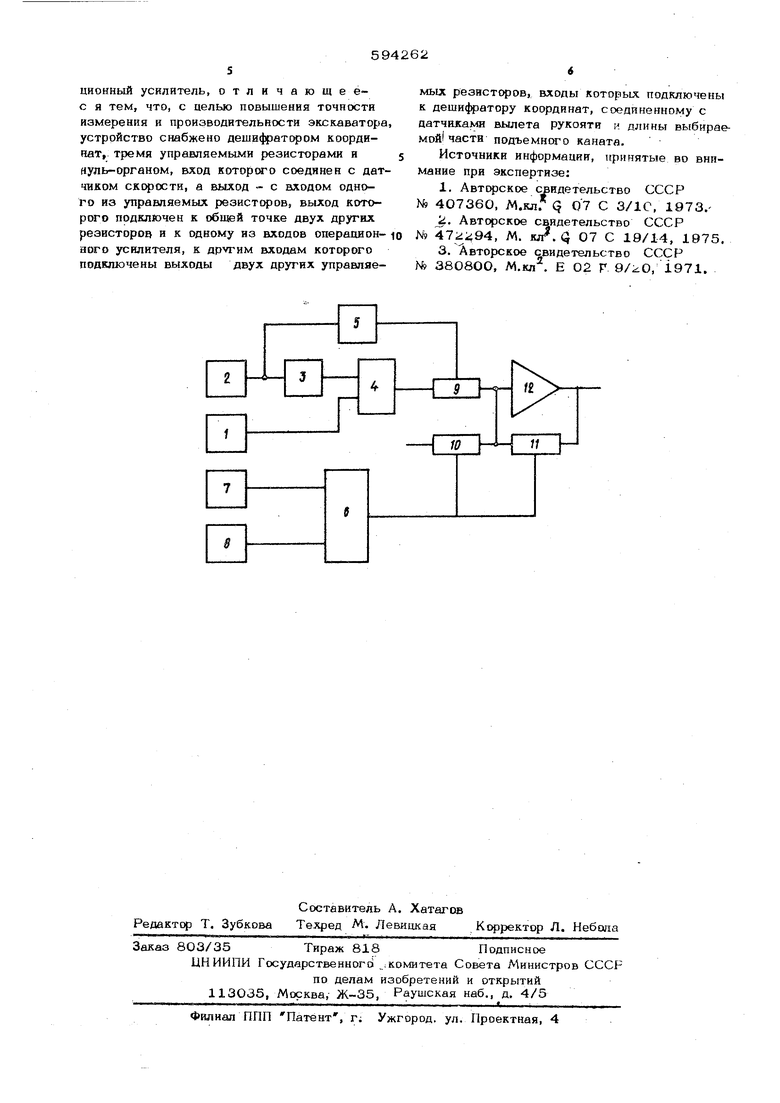
Цедь изобретения - повышение точности измерения загрузки ковша и производительности экскаватора при сохранении непрерывности контроля. Это достигается тем, что устройство снабжено дellJифpaтopoм координат, тремя управляемыми резисторами и нуль-органом, вход которого соединен с датчиком скорости а выход - с входом одного из управляемых резисторов, выход которого подключен к обиюй.точке двух других резисторов и к одному из входов операционного усилителя, к другим входам которого подключены выходы двух других управляемы/с резисторов, входы которых подключены к дишифратору координат , соединенному с датчиками вылета рукояти : и длины выбираемой части подъемного каната. Сущность изобретения поясняется чертежом. Устройство содержит датчик статическо-то тока подъемного двигателя, выполненный на датчике 1 полного тока, датчике 2 скорости, дифференциаторе 3 и сумматоре 4. Кроме того, устройство содержит нуль-орга 5 и дешифратор координат 6, входы которого соединены с датчиком 7 длины выбирав мой части подъемногоканата и датчиком-в вылета рукояти. Выход нуль-органа связан с входом управляемого резистора 9. а выхр деши4ратЬра координат подключен к входам управляемых резисторов 10 и 11, которые находятся во входной цепи и цепи обратной связи операционного усилителя 12 Устройство работает следующи м образом Сигнал с датчика скорости 2 двигателя подъема подают на дифференциатор 3, а получаемая на вькоде последнего динамическая составляющая вычитается на сумматоре 4 из полного тока, снимаемого датчиком тока 1. Сигнал с выхода сумматора 4 . пропорционален статическому току подъемного двигателя и подается на вход усилителя 12- через управляемый резистор 9, кото рый меняет свое сопротивление в зависимос ти от изменения КПД привода подъема с помощью нуль-органа 5, реагирующего на направление враще шя двигателя. На входе усилителя 12 от резистора 9 получают сигнал, пропорцио альнь й статическому уси лию .в подъемном канате, выраженному для
текущих координат рабочего оборудования следующей формулой
S,.q.(yD,).S(;,E). Из него вычитается сигнал, снимаемый с управляемого резистора 10, сопротивление которого изменяют обратно пропорционально статическому усилию0,,дОэ,Е) в подъемном канате при порожнем ковше и тех же координатах рабочего оборудования. .В цепи обратной связи операционного усилителя 12 включен управляемый резистор, сопротивление которого изменяется по закону .А ОС ф(уЭ,Р) поэтому на выходе усилителя 12 получают вапряжение постоянного тока у ;- 2 б„-ь„,(лЕ)Ь г прямо пропорциональное чистой загрузке ковша. В приведенных формулах: ,Ц - вес грунта в ковше экскаватора; р - вылет.рукояти ,Е - длина выбираемой части подъемнгаго каната , L(p,E)- безразл Еерная нелинейная функция координат рабочего оборудования, численно равная приращению усилия в канате при загрузке ковыш единицей веса; 1{|йК2- коэффициенты пропорциональности. Датчики косрдинат 7 и 8 подключены к деши чэатору координат 6j выходной сигнал которого определяется местонахождением ковша в области его рабочих перемещений и, поступая на выходы , управляемых резисторов 10 и 11, изменяет их сопротивления по заданным законам. Использование операционного усилителя с управляемыми резисторами в цепях входа и обратной связи позволяет осуществлять все вычислительные операции в одном функциональном элементе с нес гогкной настройкой, значительно упрсяЦает схему, улучшает точность и компактность устройства. Формула изобретения Устройство непрерывного измерения за рузки ковша одноковшового экскаватора, включающее датчик скорости, датчик статического тока, построенный на дифференцкаторе, датчики вьшета рукояти и длины выбираемой части подъемного каната и операционный усилитель, отличающеес я тем, что, с целью повышения точности измерения и производительности экскаватора, устройство снабжено дешифратором координат, тремя управляемыми резисторами и нуль-органом, вход которет о соединен с датчиком , а выход - с входом одного из управляемых резисторов, выход которого подключен к общей точке двух других резисторов и к одному из входов операцион- ю аого усилителя, к другим входам которого подключены выходы двух других управляемых резисторов, входы которых подключены к дешифратору координат, соединенному с датчикалш вылета рукояти и длины выбираемойчасти подъемного каната.
Источники информации, принятые во внимание при экспертизе:
1. Авторское свидетельство СССР N9 4О7360, М.кл. Q 07 С 3/1С, 1973,. Авторское свидетельство СССР N9 47;:;: 94, М. кл. Q 07 С 19/14, 1975.
3. Авторское свидетельство СССР N9 3808ОО, М.кл . Е О2 Р 9/kO, 1971.
-СлИ- Ч Л-Н
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство автоматического контроля загрузки ковша экскаватора | 1978 |
|
SU866076A1 |
| Устройство для измерения загрузки ковша экскаватора | 1983 |
|
SU1145099A1 |
| УСТРОЙСТВО для ИЗМЕРЕНИЯ ЗАГРУЗКИ КОВША ОДНОКОВШОВОГО ЭКСКАВАТОРА | 1973 |
|
SU380800A1 |
| Устройство для измерения веса содержимого ковша одноковшового экскаватора | 1974 |
|
SU563458A2 |
| Устройство для защиты стрелы экскаватора | 1989 |
|
SU1649106A2 |
| Устройство для защиты стрелы экскаватора | 1986 |
|
SU1416624A1 |
| Система автоматизированного управления транспортными перемещениями ковша экскаватора-драглайна | 1989 |
|
SU1788163A1 |
| Устройство для учета работы транспортного оборудования | 1984 |
|
SU1182123A2 |
| Способ определения веса ковша экскаватора-драглайна | 1976 |
|
SU662820A1 |
| Способ управления копающими механизмами экскаватора и устройство для его осуществления | 1982 |
|
SU1105577A1 |
