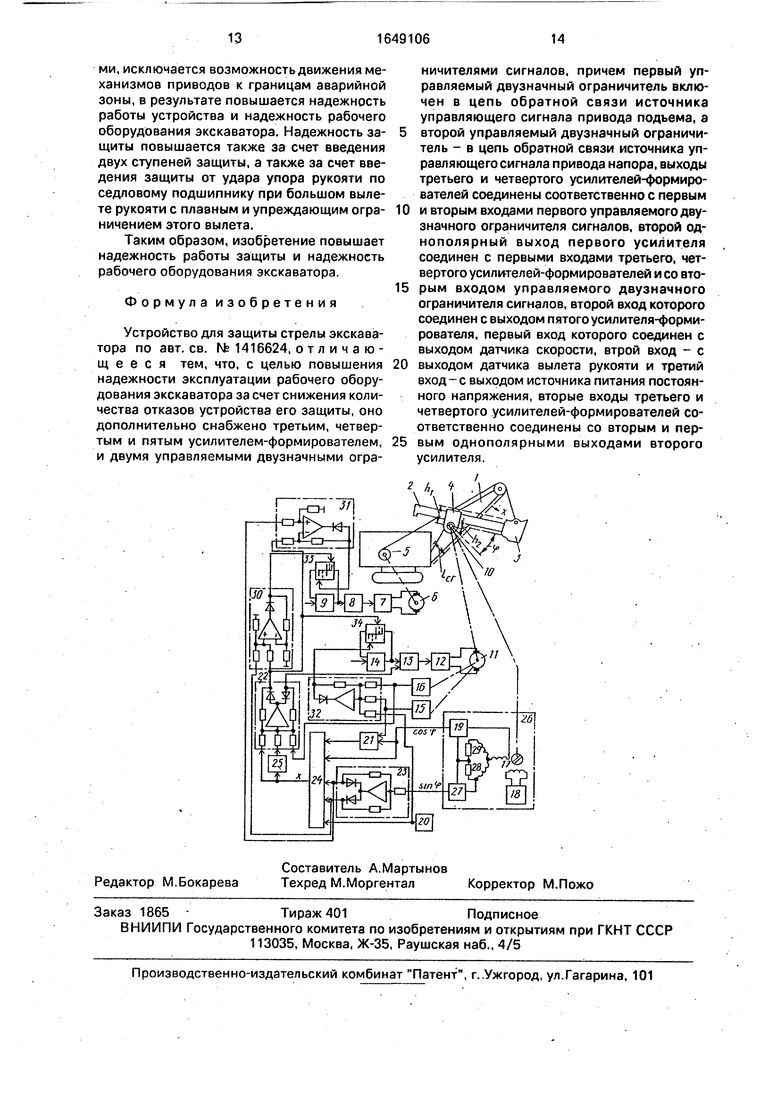
6 подъема с питающим его управляемым преобразователем 7 (генератором илитири- сторным преобразователем), системой 8 уп- равления и источником управляющего сигнала привода 9 подъема. Механизм 10 напора приводится в движение приводом напора, включающим в себя двигатель 11, управляемый преобразователь 12, систему 13 управления и источник 14 управляющего сигнала.
Устройство также содержит датчик 15 вылета рукояти, который может быть выполнен в виде сельсина с подключенным к его однофазной обмотке источником переменного напряжения и с подключенным к выводам его трехфазной обмотки выпрямителем, либо в виде потенциометра, либо в виде фазовращателя с включенным на его выходе преобразователем сдвига фаз в постоянное напряжение, либо в виде кодового цифрового датчика с включенным на его выходе цифроаналоговым преобразователем, датчик 16 скорости (или напряжения) электродвигателя механизма напора, сельсин 17 с подключенным к его однофазной обмотке источником 18 переменного напряжения, выпрямитель 19, источником 20 постоянного напряжения, блок 21 перемножения, первый 22 и второй 23 операционные усилители с двумя однополярными выходами, сумматора 24 (может быть выполнен на базе операционного усилителя), блок 25 дифференцирования, узел 26 определения синуса и косинуса угла поворота рукоятки 2 экскаватора, включающий в себя указанный сельсин 17 с подключенным к его однофазной обмотке источником 18 переменного напряжения, выпрямитель 19, фазочувстви- тельный выпрямитель 27 и два резистора 28 и 29, причем резисторы 28 и 29 включены последовательно между выходами двух фаз трехфазной обмотки сельсина 17, средняя точка между этими резисторами соединена с общей точкой выпрямителя 19 и фазочув- ствительного выпрямителя 27, а крайний вывод одного из этих резисторов 28 подключен ко входу фазочувствительного выпрямителя 27, выход которого соединен с синусным выходом указанного узла 26, вывод третьей фазы сельсина 17 подключен ко входу выпрямителя 19, выход которого соединен с косинусным выходом этого узла 26, а ось сельсина 17 соединена с поворачивающимся вместе с рукоятью 2 седловым подшипником 4 экскаватора, косинусный выход узла 26 определения синуса и косинуса угла поворота рукояти экскаватора подключен к первому входу сумматора 24 и к первому входу блока 21 перемножения, второй вход которого подключен к выходу flajrчика 15 вылета рукояти, а выход блока 21 перемножения подключен ко второму входу сумматора 24, синусный выход указанного узла 26 подключен ко входу второго операционного усилителя 23, первый и второй однополярные выходы которого подключены соответственно к третьему и четвертому входам сумматора 24, пятый вход которого соединен с источником 20 постоянного на0 пряжения, а выход сумматора 24 подключен непосредствен но и через блок 25 дифференцирования к первому и второму входам первого операционного усилителя 22 с двумя однополярными выходами, третий вход ко5 торого соединен с выходом датчика 16 скорости электродвигателя механизма напора, а его первый однополярный выход подключен к управляющему входу системы 13 управления электропривода напорного
0 механизма экскаватора.
В качестве узла 26 определения синуса и косинуса угла поворота рукояти экскаватора может использоваться также любой датчик угла (потенциометрический, индук5 ционный, кодовый) с включенными на его выходе двумя функциональными преобразователями (синусным и косинусным), но предложенное решение проще и надежнее. Для выполнения такого узла может также
0 использоваться синусно-косинусный вращающийся трансформатор с выпрямителем и фазочувствительным выпрямителем, од- . нако предложенное выполнение узла с сель- сином (бесконтактным) является более
5 надежным для сложных условий работы на экскаваторе в условиях вибраций, запыленности и воздействия атмосферных условий при установке сельсина непосредственно на рабочем оборудовании.
0 В устройство дополнительно введены третий 30, четвертый 31 и пятый 32 усилители-формирователи и два управляемых двузначных ограничителя 33 и 34 сигналов (например, диодно-транзисторных или на
5 операционных усилителях), причем первый 33 и второй 34 управляемые двузначные ограничители подключены к источникам управляющих сигналов соответственно приводов 9 подъема и напора 14, выходы
0 третьего 30 и четвертого 31 усилителей-формирователей подключены соответственно к первому и второму управляющим входам первого двузначного ограничителя 33, второй однополярный выход первого усилителя
5 22 подключен к первому управляющему входу второго ограничителя 34 и к первым вхо- дам третьего 30 и четвертого 31 усилителей-формирователей, вторые входы которых соединены соответственно со вторым и первым однополярными выходами
второго усилителя 23, второй управляющий вход второго ограничителя 34 подключен к выходу пятого усилителя-формирователя 32, три входа которого соединены с выходами соответственно датчика 15 вылета рукояти, датчика 16 скорости электродвигателя механизма напора и источника постоянного напряжения 20.
Устройство работает следующим образом.
При повороте ротора сельсина 17 (вместе с седловым подшипником 4 и рукоятью 2 экскаватора) между выводом третьей фазы трехфазной обмотки этого сельсина и средней точкой между резисторами 28 и 29 формируется переменное напряжение U, пропорциональное косинусу угла поворота рукояти р (начальная ось отсчета этого угла проходит перпендикулярно оси стрелы 1 через ось вращения седлового подшипника 4), 3
Ucos Ем COS р,
где Ем - максимальное значение фазной ЭДС трехфазной обмотки сельсина.
Это напряжение в реальных пределах
изменения угла ( ) не меняет
своей фазы, поэтому после его выпрямления с помощью выпрямителя 19 на косинусном выходе узла 26 формируется напряжение одного знака, пропорциональное косинусу угла поворота рукояти. Одно- временно с резистора 28 снимается переменное напряжение, пропорциональное синусу указанного угла
Г
Usln -rjr Ем Sin р.
Это напряжение меняет свою фазу на противоположную при изменении знака угла, поэтому после его выпрямления с помощью фазочувствительного выпрямителя 27 на синусном выходе узла 26 формируется постоянное напряжение, величина и знак которого соответствуют синусу угла поворота рукояти. Указанные зависимости получены при условии, что входные сопротивления выпрямителя 19 и фазочувствительного выпрямителя 27 достаточно велики, а сопротивления резисторов 28 и 29 одинаковы и существенно превышают сопротивления фаз трехфазной обмотки сельсина 17.
С косинусного выхода узла 26 на первый вход сумматора 24 поступает сигнал, пропорциональный величине (lcr - IHO) cos p, где Icr - расстояние между осью седлового подшипника 4 и границей допустимого приближения рукояти 2 к стреле 1; IHO - начальный уровень отсчета датчика 15 перемещения электропривода механизма напора (требуемые коэффициенты при переменных величинах на всех входах сумматора 24 обеспечиваются выбором масштабов соответствующих сигналов).. 5С помощью блока 21 перемножения перемножаются сигналы, пропорциональные перемещению электропривода механизма напора In (с выхода датчика 15) и косинусу угла поворота рукояти (с косинусного выхо- 10 да узла 26), в результате на второй вход сумматора 24 поступает сигнал, пропорциональный величине 1Н cos p. Сигнал на синусном выходе узла 26 поступает на вход второго операционного усилителя 23 с дву5 мя однополярными выходами и при одном знаке входного сигнала формирует на одном из выходов операционного усилителя 23 напряжение, пропорциональное величине -hi sin p(на другом выходе этого усили0 теля напряжение при этом равно нулю), а при другом знаке входного сигнала на втором однополярном выходе этого усилителя появляется сигнал, пропорциональный величине + П2 (на первом однополярном
5 выходе этого усилителя напряжение при этом равно нулю), где hi и П2 - расстояние от оси седлового подшипника 4 для линий, проходящих вдоль оси рукояти 2 через соответственно верхнюю и нижнюю точки кон0 струкции рукояти 2 и ковша 3, которые при неточном управлении могут ударить по верхней и нижней частям стрелы 1. Использование второго операционного усилителя 23 с двумя однополярными выходами позволя5 ет достаточно просто и практически без ненужной зоны нечувствительности (при переходе через нуль входного сигнала) обеспечить изменение коэффициентов при синусном сигнале при изменении поворота
0 рукояти 2, необходимость которого определяется тем, что в верхней и нижней частях стрелы координаты ближайших к ней точек рабочего оборудования различны. Указанные сигналы с однополярных выходов опе5 рационного усилителя 23 поступают соответственно на третий и четвёртый входы сумматора 24, на пятый вход которого с выхода источника 20 постоянного напряжения поступает сигнал, пропорциональный
0 -|сг.
8 результате на выходе сумматора 24 формируется сигнал, пропорциональный расстоянию х от стрелы 1 до ближайших к 5 стреле точек рукояти 2 в соответствии с выражением
х 1Н cos p+ (lcr - 1но) cos p- - h sin р- lcr,
где h
hi при sin , 0 npnsin 0, ha при sin p 0 .
Выходной сигнал сумматора 24 поступает на первый вход первого операционного усилителя 22 с двумя однополярными выходами, на второй и третий входы которого поступают сигналы, пропорциональные
скорости приближения к стреле -г-(с выхоd t
да блока 25 дифференцирования) и скорости электропривода механизма напора VH с выхода датчика 16 скорости, причем последние два сигнала служат для упреждения сра- батывания устройства защиты с целью исключения возможности захода ближайших к стреле точек рукояти за границу допу- стимого приближения к стреле, что повышает надежность работы устройства и надежность рабочего оборудования экскаватора (необходимость такого упреждения- срабатывания защиты определяется инерционностью электропривода и механизма, которые не могут мгновенно остановиться при появлении сигнала защиты), а также для обеспечения практически неколебательного переходного процесса при действии защиты, что также способствует повышению надежности.
Выходные сигналы на первом и втором однополярных выходах первого усилителя 22 появляются при разных знаках суммы входных сигналов. При этом величина выходного сигнала на первом однополярном выходе определяется зависимостью
0 rp(x + fy +Ky2-vH)Q
.(x+Kyili + Ky2-VH) rp/l(X+lЈi -VH)Q
Kc1
Uc2
U:2M при KC2 (X + Kyi 2-i + Ky2 V,,) U2M Kc2 (x + Kyi 2 -t Ky2 VH)
а сигнал на втором однополярном выходе характеризуется выражением
dx
ПрИ 0 Ку2 (X + КУ1 - + Ку2 VH) U2
dx
Опри КС2 (х + КУ1 + Ку2 V,,) О,
где KCI, Кс2 - коэффициенты пропорцио- нальности между расстоянием от границы приближения к стреле и выходными сигналами Uci и Uca первого операционного усилителя 22 соответственно по первому и второму однопол я рным выходам;
0
5
0
5
0
5
0
5
0
Kyi, КУ2 - коэффициенты упреждения срабатывания защиты по скоростным сигналам;
иС2м - максимальное выходное напряжение усилителя 22 по второму однополяр- ному выходу.
Сигнал Uc2 со второго однополярного выхода первого усилителя 22 поступает на первый вход ограничителя 34 и определяет ограничение задания скорости электродвигателя напора в сторону уменьшения вылета рукояти 2. Этот же сигнал поступает на первые входы третьего 30 и четвертого 31 усилителей. Выходной сигнал третьего усилителя 30 поступает на первый управляющий вход ограничителя 33 и определяет величину ограничения задания скорости электродвигателя 6 подъема в направлении поворота рукояти 2 против часовой стрелки вокруг оси седлового подшипника 4, когда возникает опасность удара по верхней части стрелы. Выходной сигнал четвертого усилителя 31 поступает на второй управляющий вход ограничителя 33 и определяет величину ограничения задания скорости электродвигателя 6 подъема в сторону поворота рукояти 2 по часовой стрелке вокруг оси седлового подшипника 4, когда возникает опасность удара по нижней части стрелы. Выбор воздействия на один из управляющих входов ограничителя 33 осуществляется в функции знака угла р (здесь в функции соответствующего ему знака синуса этого угла) между осью рукояти 2 и перпендикуляром к оси стрелы 1 (см. чертеж) с помощью сигналов, поступающих на вторые входы третьего 30 и четвертого 31 усилителей с двух однополярных выходов второго усилителя 23. При повороте рукояти 2 к верхней части стрелы 1 (р 0) появляется сигнал на первом выходе второго операционного усилителя 23, который поступает на второй вход четвертого усилителя 31 с большим коэффициентом усиления, удерживая этот усилитель в зоне максимального выходного сигнала независимо от величины поступающего на его первый вход сигнала с выхода первого усилителя 22. Это обеспечивает возможность задания источником управляющего сигнала 9 привода подъема любой скорости, вплоть до максимальной, в направлении поворота рукояти по часовой стрелке, поскольку такое направление движения у верхней части стрелы не вызывает опасности удара постреле. В этой же ситуации на втором однополярном выходе второго усилителя 23 сигнал отсутствует, нет его и на втором входе третьего усилителя 30, поэтому выходной сигнал третьего
усилителя 30 и сигнал ограничения задания скорости привода подъема в направлении поворота рукояти 2 против часовой стрелки (на первом управляющем входе ограничителя 33) определяется только величиной сигнала на втором однополярном выходе усилителя 22, что определяет готовность защиты к срабатыванию в случае приближения ковша к стреле.
Аналогично при повороте рукояти 2 к нижней части стрелы 1 (р 0) появляется сигнал на втором однополярном выходе второго операционного усилителя 23, который поступает на второй вход (с большим коэффициентом усиления) третьего усилителя 30 и удерживает его в зоне максимального выходного сигнала независимо от величины поступающего на его первый вход сигнала со второго однополярного выхода первого усилителя 22. Это обеспечивает возможность задания источником управляющего генератора 9 привода подъема любой скорости, вплоть до максимальной, в направлении поворота рукояти 2 против часовой стрелки, поскольку такое направление движения у нижней части стрелы не вызывает опасности удара по стрелке. В этой же ситуации на первом однополярном выходе второго усилителя 23 сигнал отсутствует, в связи с чем нет сигнала и на втором входе четвертого усилителя 31. и сигнал ограничения задания скорости привода подъема в направлении поворота рукояти 2 по часовой стрелке (на втором управляющем входе ограничителя 33) определяется только величиной сигнала на втором однополярном выходе первого усилителя 22, что определяет готовность защиты к срабатыванию в случае приближения ковша к нижней части стрелы.
При большом вылете рукояти 2, когда отсутствует опасность удара по стреле, выходной сигнал на первом вднополярном выходе первого усилителя 22 равен нулю и не оказывает влияния на работу привода напора. В то же время сигнал на втором однополярном выходе первого усилителя 22 максимален UC2 1)с2м. Этот сигнал поступает на первый управляющий вход ограничителя 34 и обеспечивает возможность формирования с помощью источника задающего сигнала 14 привода напора любой скорости механизма напора в сторону уменьшения вылета рукояти, вплоть до максимальной. Одновременно указанный сигнал иС2м через третий и четвертый усилители 30 и 31 формируют на первом и втором управляющих входах ограничителя 33 максимальные напряжения, обеспечивающие формирование с помощью источника
управляющего сигнала 9 сигнала задания скорости привода подъема любой величины, вплоть до максимальной, в обоих направлениях.
5При приближении к границе допустимого приближения к стреле (уменьшается величина х), когда сумма входных сигналов первого усилителя 22, умноженная на его коэффициент усиления, становится меньше
10 максимальной величины 1)С2м, сигнал на его втором однополярном выходе начинает уменьшаться, уменьшается сигнал ограничения на первом управляющем входе ограничителя 34, плавно уменьшается
15 формируемый источником 14 управляющего сигнала сигнал задания скорости привода напора в сторону уменьшения вылета стрелы, механизм напора останавливается и ис- ключается удар по стреле 1 из-за
0 уменьшения вылета рукояти. Если при этом работа и привод подъема, приближая ковш к стреле поворотом рукояти 2 против часовой стрелки к верхней части стрелы (например, при подъеме ковша), то
5 пропорционально уменьшению сигнала на втором однополярном выходе первого усилителя 22 будет уменьшаться выходной сигнал третьего усилителя 30 (на втором его входе сигнал при этом равен нулю) и сигнал
0 ограничения на первом управляющем входе ограничителя 33, уменьшается выходной сигнал источника 9, задававший движение привода подъема в направлении поворота рукояти 2 против часовой стрелки, привод
5 подъема плавно (благодаря наличию скоростных сигналов на входах первого усилителя 22)останавливается, исключая удар по стреле из-за поворота рукояти к верхней части стрелы. Выходной сигнал четвертого усили0 теля 31 (и сигнал ограничения на втором управляющем входе ограничителя 33) при этом остается максимальным вследствие действия на его втором входе сигнала с первого выхода усилителя 23, что обеспечивает
5 отвод ковша от стрелы и выход в рабочую зону заданием с помощью источника 9 управляющего сигнала противоположного знака.
Если ковш приближается к нижней час0 ти стрелы 1 при повороте рукояти 2 по часовой стрелке, то пропорционально уменьшению сигнала на втором однополярном выходе первого усилителя 22 будет уменьшаться выходной сигнал четвертого
5 усилителя 31 (на втором входе этого усилителя 31 сигнал при этом равен нулю) и сигнал ограничения на втором управляющем входе ограничителя 33, уменьшается выходной сигнал источника 9, задававший движение привода подъема в направлении
поворота рукояти по часовой стрелке, привод подъема останавливается, исключая удар по стреле из-за поворота рукояти к нижней части стрелы. Выходной сигнал третьего усилителя 30 (и сигнал ограничения на первом управляющем входе ограничителя 33) при этом остается максимальным вследствие действия на его втором входе сигнала со второго выхода второго усилителя 23, что обеспечивает отвод ковша от стрелы и выход в рабочую зону заданием с помощью источника 9 управляющего сигнала привода подъема противоположного знака.
Воздействие с первого выхода первого усилителя 22 на вход системы 13 управления электропривода напора представляет собой вторую ступень защиты, вступающую в действие в случае отказа или запаздывания действия описанной выше первой ступени защиты, что повышает надежность действия защиты и надежность рабочего оборудования, В этом случае при приближении к границе допустимого приближения к стреле сумма входных сигналов первого усилителя 22 меняет знак, и на его первом однополярном выходе появляется сигнал UC1 такого знака, который, поступая на вход системы 13 управления электропривода напора, компенсирует сигнал с выхода источ- ника 14 управляющего сигнала и останавливает электропривод и механизм напора, исключая при этом удар по стреле из-за уменьшения вылета рукояти. Если при этом работает привод подъема и продолжается приближение к стреле вследствие поворота рукояти 2 вокруг оси седлового подшипника, подъемный канат наматывается на барабан 5 в верхней части стрелы или сматывается с барабана 5 в нижней части стрелы, то увеличивающийся в соответствии с приведенной выше зависимостью выходной сигнал Uci с первого однополярного выхода первого усилителя 22 обеспечивает реверсирование электропривода напора и перемещение ближайших к стреле точек рукояти вдоль границы допустимого приближения (вверх в верхней части стрелы и вниз в нижней части стрелы), исключая тем самым возможность удара по стреле из-за перемещения механизма подъема.
Пятый-операционный усилитель 32 обеспечивает защиту от удара упора рукояти 2 по седловому подшипнику 4 при максимальном вылете рукояти. На его выходы поступают сигналы с выходов датчика 15 вылета рукояти н. датчика 1 б скорости электропривода механизма напора VH и выхода источника 20 постоянного напряжения, пропорционального заданному максимальному
вылету рукояти . На выходе этого усилителя формируется сигнал в соответствии с зависимостью
-Шм ПРИ КсЭ (н + КуЗ V,, - |„м) (-Ц3м), КсЗ (1к + КуЗ VH - „„)
ГфИ (- Цзм КсЗ (1н + КуЗ - VH - (ни) О,
при KCJ (I,, + Куэ VH - „„; 0,
где КсЗ коэффициент пропорциональности между выходным сигналом и величиной вылета рукоятки н;
Куз - коэффициент упреждения срабатывания защиты по скорости увеличения вылета рукояти VH,
Uc3M максимальное выходное напряжение усилителя 32.
При малом вылете рукояти 2, когда отсутствует опасность удара ее упором по седловому подшипнику 4, выходной сигнал пятого усилителя 32 сохраняет максимальное значение Uc3 УсЗм. Этот сигнал поступает на второй управляющий вход ограничителя 34, обеспечивая возможность
формирования с помощью источника 14 управляющего сигнала любой скорости в сторону увеличения вылета рукояти, включая максимальную. При приближении к максимальному вылету рукояти (увеличивается величина IH), когда увеличивается сумма сигнала, пропорционального вылету рукояти, и скоростного сигнала, выходной сигнал исз пятого усилителя 32 начинает уменьшается по абсолютной величине,
уменьшается сигнал ограничения на втором управляющем входе ограничителя 34, плавно уменьшается формируемый источником управляющего сигнала 14 сигнал задания скорости привода напора в сторону увеличения вылета рукояти, механизм напора останавливается и исключается удар упора рукояти по седловому подшипнику.
Благодаря наличию упреждающих скоростных сигналов защита срабатывает тем
раньше, чем больше скорбеть приближения к стреле ближайших точек рукояти и чем больше скорость приближения упора рукояти к седловому подшипнику, что обеспечивает надежность работы устройства и
надежность рабочего оборудования экскаватора.
В случае нарушений работы устройства, например обрыва внешних соединительных цепей, коротких замыканиях, нарушениях
контактов в клеммах, исчезают сигналы на соответствующих управляющих входах ограничителей 33 и 34, т.е. управляющие сигналы приводов, формируемые источниками 9 и 14 сигналов для приводов подъема и напора, ограничивается нулевыми уровнями, исключается возможность движения механизмов приводов к границам аварийной зоны, в результате повышается надежность работы устройства и надежность рабочего оборудования экскаватора. Надежность за- щиты повышается также за счет введения двух ступеней защиты, а также за счет введения защиты от удара упора рукояти по седловому подшипнику при большом вылете рукояти с плавным и упреждающим огра- ничением этого вылета.
Таким образом, изобретение повышает надежность работы защиты и надежность рабочего оборудования экскаватора.
Формула изобретения
Устройство для защиты стрелы экскаватора по авт. св. № 1416624, отличающееся тем, что, с целью повышения надежности эксплуатации рабочего оборудования экскаватора за счет снижения количества отказов устройства его защиты, оно дополнительно снабжено третьим, четвертым и пятым усилителем-формирователем, и двумя управляемыми двузначными огра
0
5
5
0
ничителями сигналов, причем первый управляемый двузначный ограничитель включен в цепь обратной связи источника управляющего сигнала привода подъема, а второй управляемый двузначный ограничитель - в цепь обратной связи источника управляющего сигнала привода напора, выходы третьего и четвертого усилителей-формирователей соединены соответственно с первым и вторым входами первого управляемого двузначного ограничителя сигналов, второй од- нополярный выход первого усилителя соединен с первыми входами третьего, четвертого усилителей-формирователей и со вторым входом управляемого двузначного ограничителя сигналов, второй вход которого соединен с выходом пятого усилителя-формирователя, первый вход которого соединен с выходом датчика скорости, втрой вход - с выходом датчика вылета рукояти и третий вход - с выходом источника питания постоянного напряжения, вторые входы третьего и четвертого усилителей-формирователей соответственно соединены со вторым и первым однополярными выходами второго усилителя.

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для защиты стрелы экскаватора | 1986 |
|
SU1416624A1 |
| Устройство для управления экскаватором типа прямая лопата | 1985 |
|
SU1364669A1 |
| Устройство для управления экскаватором типа "прямая лопата | 1983 |
|
SU1113490A1 |
| Способ управления копающими механизмами экскаватора в транспортном режиме | 1985 |
|
SU1240839A1 |
| Экскаватор-драглайн | 1978 |
|
SU746049A2 |
| Устройство управления электроприводом поворота стрелы роторного экскаватора | 1983 |
|
SU1165746A1 |
| Устройство для управления электрическим приводом тяги драглайна | 1975 |
|
SU717228A1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ ПОВОРОТА КАРЬЕРНОГО ЭКСКАВАТОРА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2347038C2 |
| СПОСОБ УПРАВЛЕНИЯ ЭКСКАВАЦИЕЙ ГРУНТА И ЭКСКАВАТОР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2436900C2 |
| Устройство для управления механизмами подъема и тяги драглайна | 1978 |
|
SU874893A1 |
Изобретение относится к автоматическому управлению экскаватором и предназначено для защиты стрелы экскаватора с рабочим оборудованием механической лопаты от ударов рукоятью (Р). Цель - повышение надежности эксплуатации рабочего оборудования экскаватора за счет снижения количества отказов устройства его заИзобретение относится к управлению и защите одноковшовых экскаваторов, а именно для защиты стрел экскаваторов с рабочим оборудованием механической лопаты от ударов рукоятью. Целью изобретения является повышение надежности эксплуатации рабочего оборудования экскаватора за счет снижещиты. Устройство содержит двигатели 6 и 11 механизмов подьема и напора соответственно с питающими управляемыми преобразователями 7 и 12, системами 8 и 13 управления и источниками 9 и 14 управляющего сигнала, датчик 15 вылета Р2 и датчик 16 скорости двигатели 11 механизма напора, источник 20 постоянного напряжения, блок 21 перемножения, операционные усилители 22 и 23, сумматор 24, блок 25 дифференцирования, узел 26 определения синуса и косинуса угла поворота Р 2, состоящий из сельсина 17, источника 18 переменного тока, выпрямителя 19, фазочувствительного выпрямителя 27 и двух резисторов 28 и 29. Дополнительно устройство снабжено усилителями-формирователями 30-32 и управляемыми двузначными ограничителями 33 и 34 сигналов. Надежность защиты при этом повысится за счет введения двух ступеней защиты и защиты от удара упора Р 2 по седловому подшипнику 4 при большом вылете Р 2 с плавным и упреждающим ограничением этого вылета. При этом защита срабатывает тем раньше, чем больше скорость приближения к стреле 1 ближайших точек Р 2 и чем больше скорость приближения упора Р 2 к седловому подшипнику 4. 1 ил. ния количества отказов устройства его защиты. На чертеже, приведена схема устройства. Устройство содержит стрелу 1 экскаватора, рукоять 2- с ковшом 3, седловой подшипник 4, барабан 5 механизма подьема, приводящийся в движение приводом подъема, включающим в себя электродвигатель О ь ю о ю
| Устройство для защиты стрелы экскаватора | 1986 |
|
SU1416624A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
