(54) УСТРОЙСТВО АВТОМАТИЧЕСКОГО КОНТРОЛЯ ЗАГРУЗКИ КОВША ЭКСКАВАТОРА
1
Изобретение относится к области автоматизации экскаваторов, в частности к способам и устройствам измерения загрузки ковша и может быть использовано для учета выработки экскаватора за любой промежуток времени, а также для дозирования загрузки и учета выработки обслуживающего транспорта.
Известно устройство контроля загрузки ковша экскаватора с материалом. Устройство осуществляет суммирование синусоидальных сигналов статической составляющей токов двигателей подъема и тяги, сдвигаемых по фазе на углы наклона соответствующих канатов в вертикальной плоскости, и вычитание из суммы сигнала, пропорционального центробежной силе, и содержит фазовращатели, фазовые дискриминаторы, амплитудные модуляторы, интеграторы и т.п. 1.
Недостатком устройства является то, что одна аппаратурная погрещность «съедает весь эффект от учета центробежной силы, не говоря уже о сложности наладки, эксплуатации и ремонта таких устройств в рабочих условиях.
Известно устройство определения степени загрузки ковша одноковшового экскаватора, реализующее способ, основанный на одновременном измерении задаваемой моделью автоматически и непрерывно изменяемой в зависимости от положения груженного ковша в пространстве эталонной величины, пропорциональной натяжению подъемного каната от действия веса порожнего ковша, и величины текущего натяжения каната с их последующим вычитанием и деле10нием сигнала разности на непрерывно изменяемую указанным образом эталонную величину 2.
Известно устройство автоматического контроля загрузки ковша экскаватора, включающее датчик натяжения каната, датчики 5 вылета рукоятки и длины выбираемой части подъемного каната, подключенные к трем входам вычислителя загрузки ковша 3.
Недостатком известного устройства является необходимость в специальной физической (кинематической) модели для непре20рывного воспроизведения эталонной величины, а при использовании на карьерных мехлопатах-даже в двух моделях равной сложности. Кроме того, способ и устройство не учитывают значительную и случайно изменяющуюся динамическую составляющую напряжения подъемного каната, обусловленную переменной инерционностью и сложным движением рабочего оборудования.
В цикле экскавации нет такого момента, когда динамика натяжения каната отсутствовала бы полностью или ее влиянием можно было пренебречь. Зависимость от различных, в том числе неподдающихся прямому измерению, факторов не позволяет автоматически вычислять динамическую составляющую и в пределах требуемой точности устранить ее влияние. Однозначность связи между исходными (натяжение подъемного каната и координаты ковша в плоскости копания) и выходным (вес горной массы в транспортируемом ковще) параметрами автоконтроля в цикле нарушается вызывая большую часть погрешности.
Цель изобретения - повышение точности и простоты контроля.
Указанная цель достигается тем, что устройство снабжено узлом распознавания момента контроля, индикатором загрузки ковша и управляемым ключом, ко входам которого подключены выходы узла распознавания момента контроля и вычислителя загрузки ковша, а к выходу - индикатор загрузки ковша, при этом вычислитель загрузки ковша выполнен в виде источника опорного напряжения, трех блоков возведения в квадрат, трех блоков умножения, двух последовательно соединенных операционных усилителей с входными сопротивлениями и переключателями полярности по числу входов, при этом каждая пара входов операционных усилителей подключена к двум неподвижным контактам переключателей полярности, а подвижные контакты через входные резисторы подключены соответственно на выходы источника опорного напряжения блоков возведения в квадрат, блоков умножения и к трем входам вычислителя, к которым подключены входы блоков возведения в квадрат и блоков умножения, причем последние соединены между собой попарно.
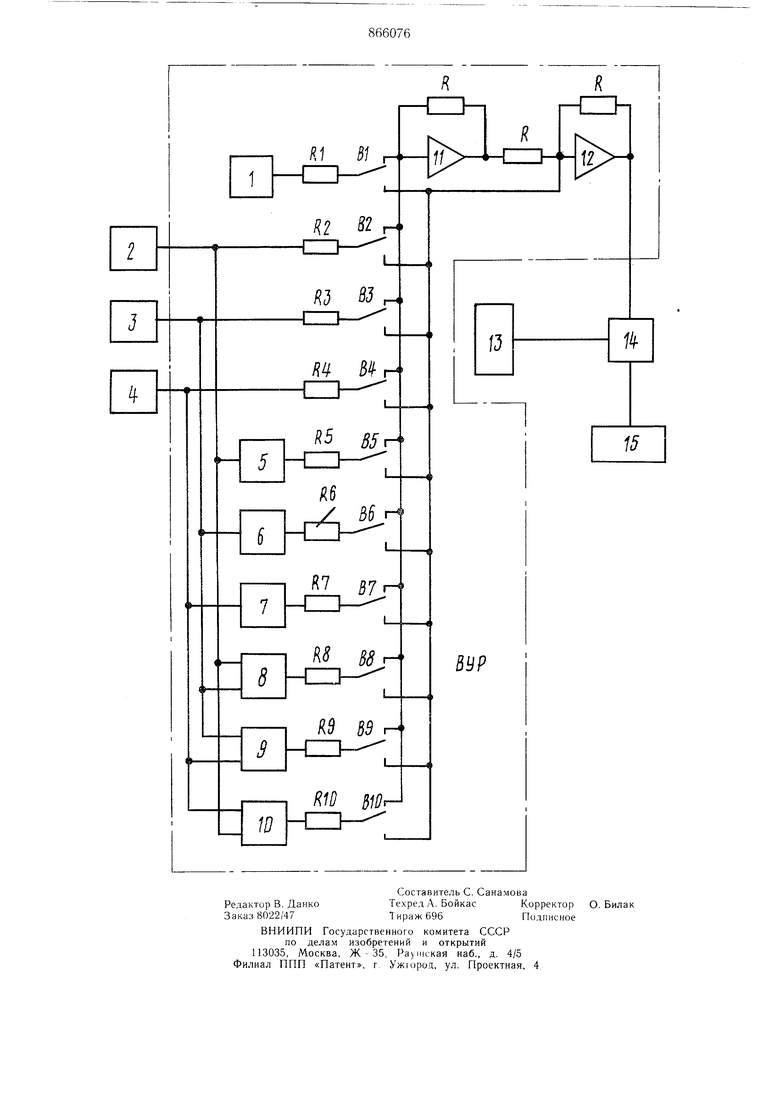
На чертеже показана блок-схема предлагаемого устройства.
Устройство содержит источник 1 опорного стабилизированного напряжения, датчики 2-4 натяжения каната, вылета рукоятки и длины выбираемой части подъемного каната, блоки 5, 6 и 7 возведения в квадрат, блоки 8, 9 и 10 умножения, операционные усилители 11 и 12с входными сопротивлениями R1-R10 и переключателями полярности В1-В10, узел 13 распознавания момента взвешивания, управляемый ключ 14 и индикатора 15 загрузки ковша.
Действительно четырехмерную зависимость
G f(S,f, )
МОЖНО аппроксимировать зависимостью ви ,-i-biS 6jy 6 L45S b6p + 67L+bgSp + &9p-t -b,o-t-S,
где G - действительный вес горной массы в
транспортируемом ковше; S - текущее натяжение подъемного каната;
р, 1 - текущие координаты ковща: вылет рукояти (или длина выбираемой
части каната тяги у драглайна) и
длина выбираемой части подъемнол го каната соответственно; G - расчетное значение веса горной массы.
Выбором момента измерения загрузки ковша, а также величин и знаков коэффициентов Ь - 6)0 можно свести к минимуму ошибку автоконтроля ДО в цикле.
При работе экскаватора исходные параметры непрерывно преобразуют датчиками 2, 3 и 4 в соответствующие напряжения постоянного тока. Одновременно сигналы этих напряжений возводят в квадрат на блоках 5, 6 и 7 и попарно перемножают на блоках 8, 9 и 10. Сигнал опорного напряжения и мгновенные значения полученные от датчи
ков, квадраторов и умножителей сигналов
складывают с соответствующими весами,
пропорциональными коэффициентам 6i - 610
агрессии, на операционном усилителем 12.
Коэффициенты Ь,-Ь,(, находят следующим образом: в каждом экспериментальном цикле экскавации в выбранном для измерения загрузки периоде фиксируют действительный вес горной массы в ковше и величины сигналов от датчиков, квадраторов и умножителей устройства. Совокупности этих
данных в доверительном числе экспериментальных циклов являются исходным материалом для отыскания количественных характеристик связи между выходным и первичными параметрами автоконтроля. В результате расчета например с помощью аппарата
регрессионного анализа, вычисляют абсолютные величины и знаки весовых коэффициентов ti - fe , задаваемые в схеме устройства входными сопротивлениями R1-R10 и переключателями полярности В1-В10 соответственно. Расчет прост и может быть выполнен вручную, но для больщей точности объективности и быстроты вычислений желательно использовать ЦВМ, посольку в их матобеспечении всегда имеются стандартные программы регрессионного анализа.
В частном случае какой-либо весовой коэффициент (или коэффициент) может оказаться нулем, тогда соответствующее входное сопротивление равно бесконечности, а цепь данного параметра должна быть отключена. Полярность слагаемых можно изменять переключателями В1-В10 благодаря инвертирующим свойствам операционного усилителя П.
В период отбора информации, распознаваемой в цикле по некоторым атрибутивным признакам узлом 13, этот узел выдает сигнал на управляющий вход ключа 14 и через замкнутую коммутируемую цепь последнего на индикатор 15 загрузки ковша, с выхода операционного усилителя 12 проходит сигнал расчетного веса, минимально отличающийся в этот период от сигнала действительного веса горной массы в регистрируемом ковше.
Приведенные в описании исходные параметры автоконтроля: натяжение каната, его длина и вылет рукояти не являются единственно возможными как в качественном, так и в количественном смысле. Например, вместо длины выбираемой части подъемного каната можно вполне пользоваться параметром - угол наклона рукояти к стреле - это зависит только от наличия соответствующих датчиков. При необходимости большей точности или непрерывности автоконтроля парк исходных параметров может быть расширен за счет включения в схему устройства датчиков дополнительных координат ковша (например угла наклона платформы к горизонту, скорости или ускорения поворота и т. п.) Сущность изобретения при этом не изменяется, лишь в устройстве возрастает количество блоков умножения и возведения в квадрат. Устройство нечувствительно к таким недостаткам первичных датчиков как нелинейность выходной характеристики.
Использование изобретения позволяет существенно повысить точность автоконтроля в цикле.
Формула изобретения
Устройство автоматического контроля загрузки ковша экскаватора, включающее
датчики натяжения каната, вылета рукоятки и длины выбираемой части подъемного каната, подключенные к трем входам вычислителя загрузки ковша, отличающееся тем, что, с целью повышения точности и простоты контроля, оно снабжено узлом распознавания момента контроля, индикатором загрузки ковша и управляемым ключом, ко входам которого подключены выходы узла распознавания момента контроля и вычислителя загрузки ковша, а к выходу - индикатор загрузки ковша, при этом вычислитель загрузки ковша выполнен в виде источника опорного напряжения, трех блоков возведения в квадрат, трех блоков умножег ния, двух последовательно соединенных операционных усилителей с входными сопротивлениями и переключателями полярности по числу входов, при этом каждая пара входов операционных усилителей подключена к двум неподвижным контактам переключателей полярности, а подвижные контакты через входные резисторы подключены соответственно на выходы источника опорного напряжения, блоков возведения в квадрат, блоков умножения и к трем входам вычислителя, к которым подключены входы блоков возведения в квадрат и блоков умножения, причем последние соединены между собой попарно.
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР № 469893, кл. G 01 G 23/36, 1972.
2.Авторское свидетельство СССР № 411199, кл. Е 02 F 9/20, 1970.
3.Авторское свидетельство СССР № 594262, кл. Е 02 F 9/20, 1976.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения загрузки ковша экскаватора | 1983 |
|
SU1145099A1 |
| Устройство для измерения веса ковша драглайна | 1977 |
|
SU691696A1 |
| Устройство для определения загрузки ковша драглайна | 1978 |
|
SU747942A1 |
| Устройство непрерывного измерения загрузки ковша одноковшового экскаватора | 1976 |
|
SU594262A1 |
| Устройство для измерения веса содержимого ковша одноковшового экскаватора | 1974 |
|
SU563458A2 |
| Система стабилизации натяжения подъемного каната экскаватора-драглайна | 1986 |
|
SU1320350A2 |
| Устройство автоматического управления процессом копания драглайна | 1982 |
|
SU1063950A1 |
| УСТРОЙСТВО для ИЗМЕРЕНИЯ УГЛОВОГО | 1973 |
|
SU375351A1 |
| Система стабилизации натяжения подъемного каната экскаватора-драглайна | 1990 |
|
SU1768720A1 |
| УСТРОЙСТВО для ИЗМЕРЕНИЯ ЗАГРУЗКИ КОВША ОДНОКОВШОВОГО ЭКСКАВАТОРА | 1973 |
|
SU380800A1 |