1
Изобретение предназначено для использования на транспорте, например в путеизмерительных вагонах прн автоматическом контроле, классификации и оценке неисправностей рельсового пути.
Известно путеизмерительное устройство, реализуюпдее оценки состояния рельсового пути, в котором производятся измерения параметров датчиком, сигналы с которого подаются на преобразователь аналог - код и в цифровод кода поступают в фильтр, где обрабатываются в соответствии с требуемым алгоритмом и передаются в блок пороговых элементов, сравниваются с кодами, которые соответствуют степеням отклонений от нормы по измеряемому параметру пути. После нахоладения степени отклонений от нормы определяется штраф в баллах, которые передаются в счетчик и суммируются 1.
Известно также устройство, в котором реализуется аналогичный предлагаемому способ автоматического контроля и оценки состояния пути, основанный на измерении его параметров и преобразовании в код сигналов от датчиков параметров, последующем вводе кодированных значений измеряемых параметров в электронную вычислительную магпину (ЭВМ) и их обработке 2.
Основным недостатком известных способов является постоянство по пути периодичности
преобразования в код п ввода в ЭВМ сигналов, характеризуюгцих значения измеряемых нараметров, при этом период выбирается в предположении постоянства статистических характеристик измеряемых параметров, что снижает точность контроля.
Пелью изобретения является повышение точности контроля. Это достигается тем, что преобразование в код и ввод в вычислительную машину сигналов от датчиков параметров производят периодично по характеристикам измеряемых параметров в соответствии со скоростью движения путеизмерительного транспортного средства, а команды на преобразование сигналов от датчиков параметров посылают на вход блока аналогоцифровых преобразователей после проезда участков пути, соответствуюш,их периодам измерения параметров, в зависимости от сравнения их зиачений с значения.ми иорогов функции балльной оценки пути.
При контроле и оценке состояния рельсового пути измеряются, например, отклонения от условного следуюидих геометрических
5 параметров пути: положения пути в поперечном уровне, положения пути в плане, ширины колеи, коротких просадок.
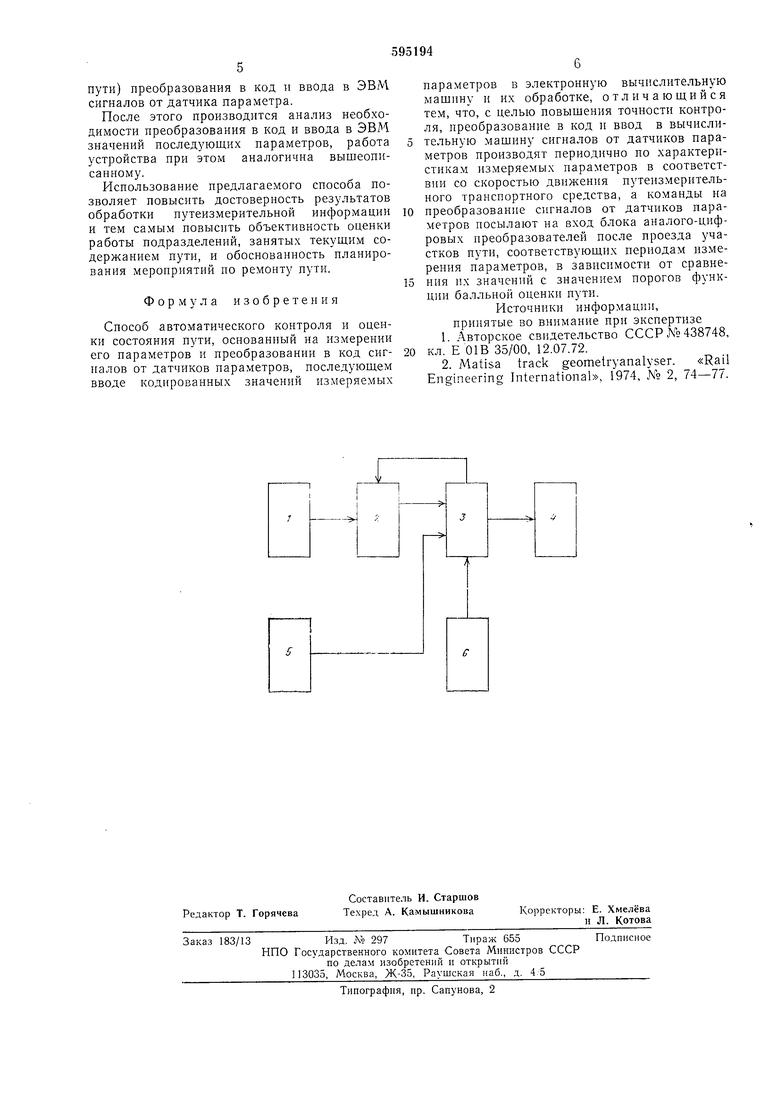
На чертеже показано устройство, реализуюи1,ее предлагаемый способ.
0
Блок 1 датчиков параметров задает значения измеряемых параметров в аналоговом виде, например возвратно-поступательное движение тросов измерительной системы преобразуется во вращательное движение вала, которое служит выходом блока датчиков параметров.
Блок 2 аналого-цифровых преобразователей служит для иреобразования аналоговых сигналов, характеризующих значения измеряемых параметров в код, например, для преобразования угла поворота вала в код. Кро.ме информационных входа и выхода, к которым подключены соответственно выход блока 1 датчиков и вход ЭВМ 3, блок 2 оборудован управляющим входом, к которому подключен один из выходов ЭВМ 3.
Бортовая ЭВМ 3 осуществляет прием измерительной информации и управляющих воздействий с пульта управления, классификацию неисправностей и оценку состояния пути в баллах, подготовку и выдачу информации на регистрацию. Кроме того, ЭВМ 3 оцеиивает скорость движения путеизмерителя и текущие характеристики измеряемых параметров, на основе которых определяет необходимую периодичность и последовательность иреобразования и ввода в ЭВМ 3 измерительной информации, и в соответствии с этим вырабатывает управляющие сигналы, которые с выхода ЭВМ подключепы к управляющему входу блока 2 преобразователей.
Регистрирующие приборы 4 осуществляют регистрацию резз-льтирующей информации, например, на печатном бланке ц перфоленте.
Датчик 5 скорости, выполненный, например, в виде осевого фотоэлектрического датчика, вырабатывает импульсы, частота следования которых пропорциоиальна скорости движеиия путеизмерителя, и подключен к ЭВЛ 3.
Пульт 6 управления подключен к ЭВМ и служит для оперативного вмещательства в ход вычислительного процесса, например для ввода информации, влияющей на оценку состояния пути в баллах.
Последовательность работы по предлагаемому способу осуществляется по пунктам а, б, в, г, д, е, ж, 3.
а.ЭВМ 3 принимает от датчика 5 скорости сигнал о проходе путеизмерителем элементарного участка пути, переходит к п. б.
б.ЭВМ анализирует, пройден ли участок пути, соответствующий установленному для данного параметра перподу дискретизации. Если участок еще не пройден, то переходят к п. в., а если пройден, то к п. д.
в.Увеличивают на единицу номер иараметра и проводят, существует ли параметр с таким номером. Если существует, то возвращается к п. б., если не существует, то к п. г.
г.Номер параметра определяют равным единице. Анализируют значение скорости движения путеизмерителя. Если скорость меньще некоторого порогового значения Vi, то установленные периоды дискретизации параметров (по пути) умеиьщают на ASi и переходят к п. а., в противном случае переходят к п. а. без изменения периодов дискретизации.
д.ЭВМ 3 вырабатывает управляющий сигнал па преобразование в код и ввод в ЭВМ
сигнала, характеризующего значение параметра, для которого истек иериод дискретизации, и переходит к и. с.
е.( 3 определяет наличие ошибок в принятом коде, например, с использованием
контроля кода по модулю два и дополнительпой проверкой на допустимость величины отклонения принятого кода от кода, поступивщего в предыдущий период. При наличии
ощибки повторяют п. д. с тем же номером параметра (повторное преобразование и ввод даниого иараметра). При получении п ошибок подряд устаиавливают бесконечный период дискретизации данпого параметра (обход
неисправного измерительного канала) и переходят к п. в. Прп отсутствии ощибки переходят к п. ж.
ж.ЭВМ 3 обрабатывает пост пающпй код параметра в соответствии с иринятой методикой контроля и оценки состояиия рельсового пути и вычисляет текущие корреляциониые или спектральные характеристики данного иараметра, например текущее среднее значение модуля первых разностей, в зависимости
от которых назначают период дискретизации данного параметра по пути, и переходит к п. 3.
з.ЭВМ 3 определяет отклонение принятого для нее кода от границы соответствующей
функции балльной оценки. Если это отклонение меньще А/г, то уменьщают период дискретизации данного параметра на ASg и переходят к п. е. В противном случае переходят к п. а.
Устройство, осуществляющее предлагаемый способ, работает следующим образом.
Сигналы датчика 5 скорости, подключенного к ЭВМ 3, обрабатываются в последней с целью определения необходимости преобразования в код и ввода в ЭВМ значений тех или иных иараметров от блока 1 датчиков. Если период (по пути) обработки данного параметра истекает, то на управляющий вход блока преобразователей 2 подается команда
на преобразование и ввод в ЭВМ данного параметра.
Код, определяющий значение измеряемого параметра, поступает в ЭВМ. Принятый в ЭВМ 3 код параметра обрабатывается в соответствии с прпнятой методикой контроля и оценки состояния пути. Результаты обработки регистрируются на приборах блока 4, а сам ход обработки данного параметра может быть оперативно скорректирован с использованием
пульта 6 управления, подключенного к ЭВМ 3.
Затем определяются текущие характеристики измеряемого параметра и с учетом последиих, а также значения скорости движения путеизмерителя иазначается периодичность (по
пути) преобразования в код и ввода в ЭВМ сигналов от датчика параметра.
После этого производится анализ необходимости преобразования в код и ввода в ЭВМ значений последующих параметров, работа устройства при этом аналогична вышеописанному.
Использование предлагаемого способа позволяет повысить достоверность результатов обработки путеизмерительной информации и тем самым повысить объективность оценки работы подразделений, занятых текущим содержанием пути, и обоснованность планирования меронриятий по ремонту пути.
Формула изобретения
Способ автоматического контроля и оценки состояния пути, основанный на измерении его параметров и преобразовании в код сигналов от датчиков параметров, последующем вводе кодированных значений измеряемых
параметров в электронную вычислительную мащину и их обработке, отличающийся тем, что, с целью повыщения точности контроля, преобразование в код и ввод в вычислительную мащину сигналов от датчиков параметров производят периодично по характеристикам измеряемых параметров в соответствии со скоростью движения путеизмерительного транспортного средства, а команды на
преобразование сигналов от датчиков параметров посылают на вход блока аналого-цифровых нреобразователей после проезда участков пути, соответствующих периодам измерения параметров, в зависимости от сравнеНИН их значений с значением порогов функции балльной оценки пути.
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР № 438748, кл. Е 01В 35/00, 12.07.72.
2.Matisa track geometryanalyser. «Rail Engineering International, 1974, № 2, 74-77.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОЦЕНКИ СОСТОЯНИЯ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ | 2008 |
|
RU2394120C2 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ СОСТОЯНИЯ РЕЛЬСОВОГО ПУТИ | 1995 |
|
RU2074829C1 |
| Способ оценки состояния железнодорожного пути с использованием электронной вычислительной машины (эвм) и измерительных устройств,смонтированых в путеизмерительном вагоне | 1976 |
|
SU618476A1 |
| Информационно-управляющая система перемещения рельсов, шпал и балласта для обеспечения работоспособности железнодорожного пути по заданным критериям | 2020 |
|
RU2738026C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СОСТОЯНИЯ РЕЛЬСОШПАЛЬНОЙ РЕШЕТКИ БЕССТЫКОВОГО ЖЕЛЕЗНОДОРОЖНОГО ПУТИ | 2011 |
|
RU2457969C1 |
| ПУТЕИЗМЕРИТЕЛЬНЫЙ КОМПЛЕКС ПТ-9 | 2007 |
|
RU2438902C2 |
| СПОСОБ КОНТРОЛЯ СОСТОЯНИЯ РЕЛЬСОВОГО ПУТИ | 2009 |
|
RU2394714C1 |
| Устройство для автоматической оценки состояния рельсового пути | 1972 |
|
SU438748A1 |
| СПОСОБ КОНТРОЛЯ ПОПЕРЕЧНОГО ПРОФИЛЯ И РАССТОЯНИЯ МЕЖДУ РЕЛЬСАМИ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ И ВАГОН-ПУТЕИЗМЕРИТЕЛЬ | 2010 |
|
RU2418705C1 |
| СПОСОБ КОНТРОЛЯ СОСТОЯНИЯ РЕЛЬСОВОГО ПУТИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1997 |
|
RU2114950C1 |
