(54) МАНИПУЛЯТОР
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1980 |
|
SU872148A1 |
| Манипулятор | 1980 |
|
SU872149A1 |
| Многопозиционный манипулятор | 1975 |
|
SU556017A1 |
| Сварочный манипулятор | 1981 |
|
SU996156A1 |
| Манипулятор | 1989 |
|
SU1742015A1 |
| Кантователь для сборки под сварку | 1980 |
|
SU910388A1 |
| Манипулятор для сварки | 1980 |
|
SU975294A1 |
| Манипулятор | 1980 |
|
SU979058A1 |
| КОЛЕСНАЯ БРОНЕМАШИНА | 2005 |
|
RU2314478C2 |
| Многопозиционный манипулятор | 1985 |
|
SU1263484A1 |
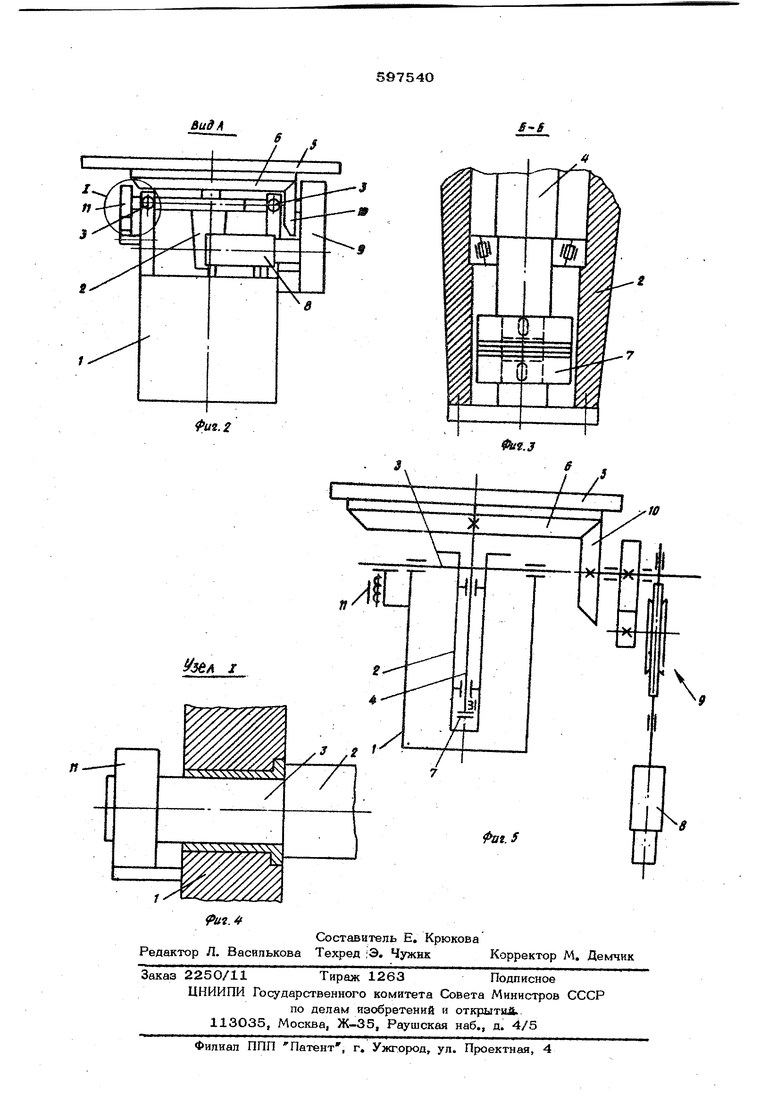
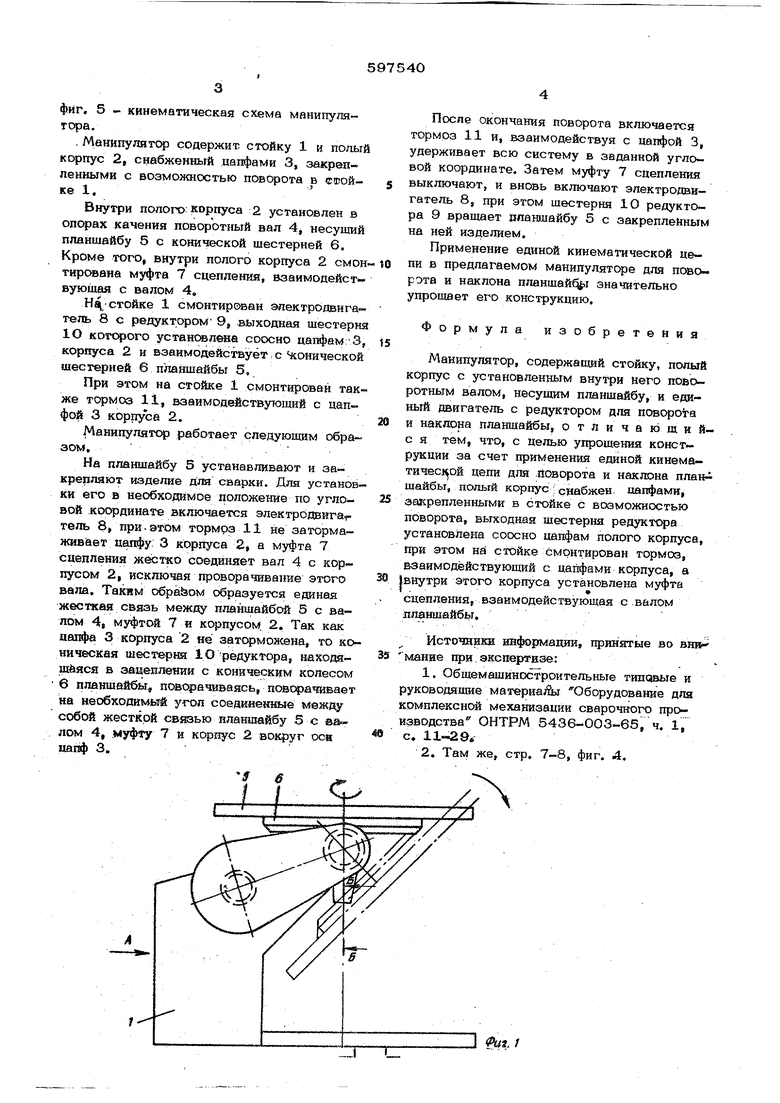
Изобретение относится к области свар-. ки, в-частности к оборудованию по механизации сварочных процессов и к устройствам для вращения и наклона свариваемы изделий в процессе сварки. Известны манипуляторы,. содержащие стойку, корпус с поворотным валом, несушим планшайбу, а также привод для наклона планшайбы и привод для поворота планшайбы l . Недостатком манипуляторов является наличие двух приводов, один из которых служит для вращения плашиайбы, а другой для наклона планшайбы, причем привод наклона планшайбы работает всего около 3% от рабочего времени манипулятора. Наиболее близким к предлагаемому изобретению по технической сущности и до стигаемому результату является манипулятор, содержащий стойку, полый корпус с установленным внутри него, поворотным ва лом, несущим планщайбу, и единый двигатель с редуктором для поворота и наклона плашдайбы, а также две кинематических цепи и устройство для переключения цепей, причем одна из цепей предназначена для осуществления наклона планшайбы, а другая для ее поворота 2J. Недостатком этого манипулятсрп является наличие двух кинематических цепей, сложных по конструкции, причем кинё лати- ческая цепь наклона планшайбы используется мало, Целью .изобретешш является упрощение конструкции за счет применения единой кинематической цепи для поворота и наклона планшайбы. Для этого ПО71ЫЙ корпус предлагаемого манипулятора снабжен цепфами, закрепленными в стойке с возможностью поворота, выходная шестерня редуктора установлена соосно цапфам полого корпуса, при этом на стойке смонтирован тормоз, взаимодействующий с цапфами корпуса, а внутри этого корпуса установлена муфта сцепления, взаимодействующая с валом планшайбы. На фиг, 1 изображен предлагаемый манипулятор; на фиг. 2 - вид по стрелке А на фиг. 1; на фиг, 3 - сечение Б-В на 1ИГ. 1; на фиг, 4 - узел 1 на фиг. 2; на ф
фиг, 5 - кинематическая схема манипупягсра.
. Манипугаятсф содержит стойку 1 и полый корпус 2, снабженный цапфами 3, закрепленными с возможностью поворота в сиойке 1,
Внутри полого корпуса 2 установлен в опорах качения поворотный вал 4, несущий планшайбу 5 с конической шестерней 6, Кроме того, внутри полого корпуса 2 смон тирс«ана муфта 7 сцепления, взаимодействующая с валом 4.
Н4 стойке 1 смонтирован электродвигатель 8 с редуктрром 9, выходная шестерня 1О которого устансжлиаа соосно цапфам 3, корпуса 2 и взаимодействует с ScoHH4ecKOE шестерней 6 пла янайбы 5,
При этом на стойке 1 смонтирован так же тормоз 11, взаимодействующий с цапфой 3 корпуса 2.
Манипулятс работает следующим образом,
На планшайбу 5 устанавливают и за крепляют изделие для сварки. Для установки его в необходимое положение по угловой координате включается электродвигаг тель 8, при этом тормрз 11 не затормаЖив1ает цапфу 3 корпуса 2, а муфта 7 сцепления жёс7«о соединяет вал 4 с корпусом 2, исключая проворачивание этого вала. Таким образом образуется единая жесткая связь между планшайбой 5 с валом 4( муфтой 7 и корпусом. 2. Так как папфа 3 корпуса 2 яё затсрможена, то коническая шес1«рнн10-редуктора, находящйяся в заиеилеяии с коническим колесом 6 планшайбы, поворачиваясь, поворачивает на необходимый угол соедияеншле между собой жесткой связью планшайбу 5с ва лом 4, .муфту 7 и корпус 2 вокруг ося цапф 3,
После окончания поворота включается тормоз 11 и, взаимодействуя с цапфой 3, удерживает всю систему в заданной угловой координате. Затем муфту 7 сцепления выключают, и вновь включают электродвигатель 8, при этом шестерня 10 редуктора 9 вращает плашлайбу 5 с закрепленным на ней изделием.
Применение единой кинематической цепи в предлагаемом манипуляторе для поворота и наклона планшай г значительно упрощает его конструкцию.
Формула изобретения
Манипулятор, содержащий стойку, полый корпус с установленным внутри него поворотным валом, несущим планшайбу, и единый двигатель с редуктором для поворота
и наклона планшайбы, отличак)щий- с я тем, что, с целью упрощения конструкции за счет применения единой кинематичес| ой цепи для .йоворота и наклона планшайбы, полый корпус : снабжен цапфами,
эшфепленными в стойке с возможностью поворота, выходная шестерня редуктора установлена соосно цапфам полого корпуса, при этом на стойке смонтирован тормоз, взаимодействующий с цапфами корпуса, а
1внутри этого корпуса установлена муфта
сцепления, взаимодействующая с .валом планшайбы.
Источники информации, принятые во анв-манне при экспертизе:
с.
2,Там же, стр, 7-8, фиг, 4,
%г, Г
Фи.2
-J tf
