(54) МАНИПУЛЯТОР
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1980 |
|
SU872148A1 |
| Манипулятор | 1976 |
|
SU597540A1 |
| Манипулятор | 1989 |
|
SU1742015A1 |
| Кантователь для сборки под сварку | 1980 |
|
SU910388A1 |
| Сварочный манипулятор | 1981 |
|
SU996156A1 |
| Сварочный манипулятор | 1981 |
|
SU1100067A1 |
| Роликовый манипулятор | 1975 |
|
SU556922A1 |
| Сварочный манипулятор | 1990 |
|
SU1775260A1 |
| УСТРОЙСТВО ДЛЯ СВАРКИ И НАПЛАВКИ С ПРОГРАММНЫМ УПРАВЛЕНИЕМ | 2005 |
|
RU2305616C1 |
| ГОЛОВКА ДЛЯ СВАРКИ ПЛАВЯЩИМСЯ ЭЛЕКТРОДОМ | 2011 |
|
RU2457089C1 |
.1
Изобретение относится к сварке, в частности к оборудованию для механизащш сварочных процессов, и может быть использовано в манипуляторах с числовым программным управлением.
Известен сварочный манипулятор, содержащий станину, поворотную траверсу со шпинделем планшайбы, привод наклона планшайбы и привод вращения планшайбы 1.
Недостатком этого манипулятора является наличие двух приводов, причем время работы привода механизма наклона пл9ншайбы по отношению к общему рабочему времени составляет около 3%, а мощность это1о привода у большинства сварочных манипуляторов универсального типа больше привода механизма вращения планшайбы.
Известен также сварочный к нипулятор, содержащнй станину, планшайбу, консоль, две электромагнитные муфты, электродвигатель для наклона и вращения планшайбы и две кинематические цепи, содержащие цилиндрические, конические и червячные пары 2.
Недостатки данного манипулятора - наличие двух самостоятельных кинематических цепей, одна из KOTOpbix предназначена для вращения планшайбы, расс штанная на передачу мощности, необхощтюй для вращения планигайбы, другая - для наклона планшайбы и рассчитанная на передачу соответствующей мощности;; наличие двух электромагнитных муфт для переключения кинематических цепей; невозможнйсть произведения одновременного вращения и наклона планшайбы.
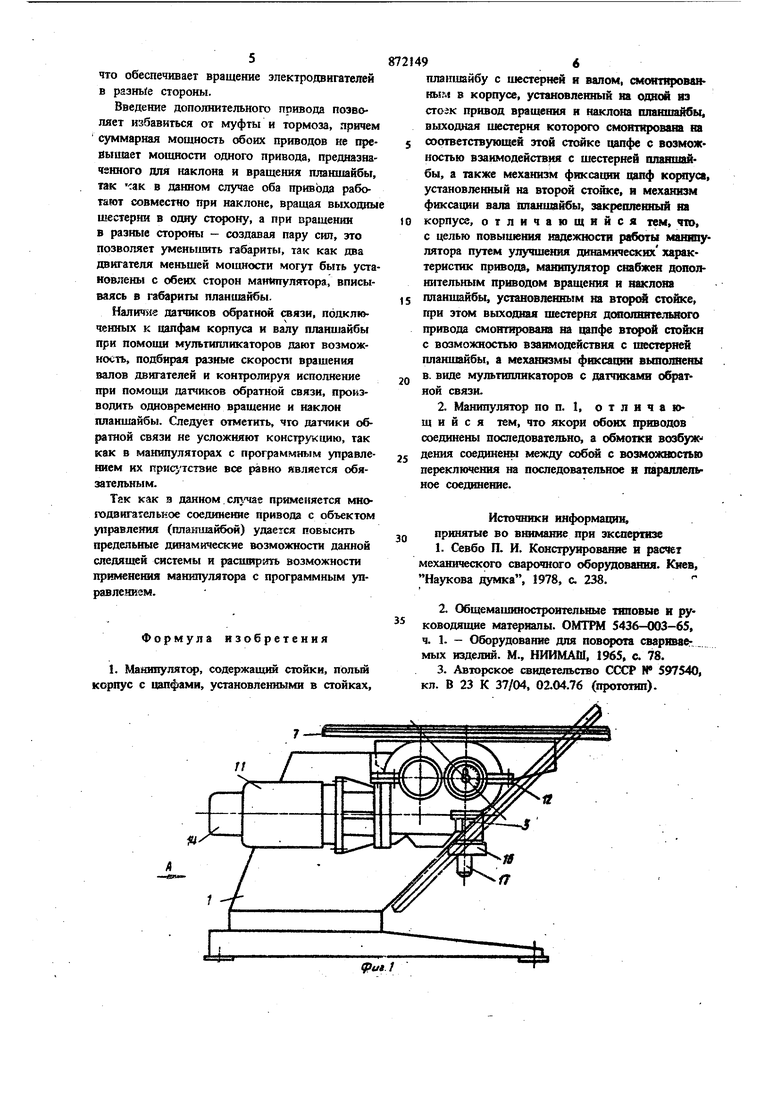
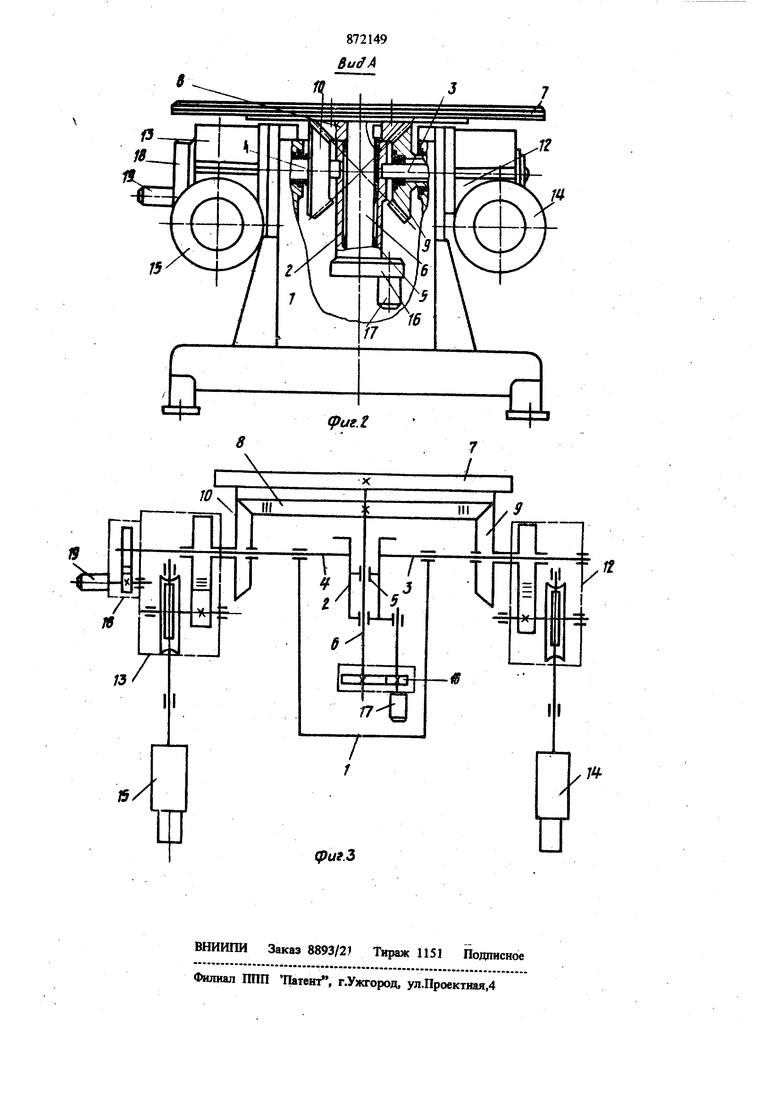
Наиболее близким по технической сущности и достигаемому результату является манипулятор, содержащий стойки, полый корпус с цацфами, установленными в стойках, планшайбу с шестерней и валом, смонтированным в корпусе, установленный на одной из стоек привод вращения и наклона планшайбы, выходная шестерня которого смонтирована на соответствующей этой стойке цапфе с возможностью взаимодействия с шестерней планшайбы, а также установленный на второй стойке механизм фиксации цапф корпуса и механизм фиксации вала планшайбы, закрепленный на корпусе |3. Недостатками данного манипулятора являются: выполнение механизмов фиксации в виде тормоза и муфты сцепления, которые усложняют конструкцию, манипулятор не обеспечивает одновременного вращения и наклона планшайбы, кроме того, привод по мощности должен быть не меньше мощности, необходимой для наклона или вращения планшайбы, причем той из них, которая больше (в большинстве случаев это мощность необходимая для наклона планшайбы), это заставляет увеличивать габариты изделия, а, кроме того, ухудшает динамическую характеристику привода манипулятора, которая зависит от момента инерции ротора двигателя. Динамическая харак теристика является одной из самых важных 3 манипуляторе и, с точки зрения ее улучшения, целесообразней иметь многоприводную систему для вращения н наклона планшайбы. Цель изобретения - повышение надежности работы манипулятора путем улучшения динамических характеристик привода. С этой целью манипулятор, содержащий стойки, поль1Й корпус с цапфами, установленными в стойках, планшайбу с шестерней и вало1у1, смонтированным в корпусе, установлен ный на одной из стоек привод вращения и наклона планшайбы, выходная шестерня которого смонтирована на соответствующей этой стойке цапфе с возможностью взаимодействия с шестерней планшайбы, а также механизм фиксации цапф корпуса, установленный на второй стойке, и механизм фиксации вала планшайбы, закрепленный на корпусе, снабжен дополнительным приводом вращения и наклона планшайбы, установленным на второй стойке, при этом выходная шестерня дополнительного привода смонтирована на цапфе второй стойки с возможностью взаимодействия с шестерней планшайбы, а механизм фиксации выполнен в виде мультипликаторов с датчиками обратной связи. Кроме того, якори обонх приводов соединены последовательно, а обмотки возбуждения соединены между собой с возможностью переключения на последовательное и параллельное соединение. На фиг. 1 изображен манипулятор, общий вид; на фиг. 2 - вид А на фиг. 1; }га фиг. 3 - кинематическая схема манипулятора Манипулятор содержит (фиг. 1) стойки 1, полый корпус 2, закрепленный на стойках с возможностью вращения в цапфах 3 и 4 (фиг. 2). Внутри полого корпуса 2 в подшип никах S установлен вал 6, несущий плашпайбу 7. На валу 6 закреплена коническая шеетеряя 8, взаимодействующая с выходными шестернями 9 и 10 приводов 11 вращения и наклона планшайбы, содержащих редукторы 12 И 13, приводимые в действие электродвигателями постоянного тока 14 н 15 соответственно с тахогенераторами. Корпуса редукторов 12н 13 закреплены на стойках 1. На корпусе 2 установлен механизм фиксации вала 6. На полом корпусе 2 установлен мультипликатор 16, взаимодействующий с валом 6, на выходному валу которого подсоединен датчик обратной связи 17 (напрнмер, вращающийся трансформатор типа ВТМ). На одной из стоек 1 установлен механизм фиксации цапф корпуса, выполненный в виде мультипликатора 18, взаимодействующего с цапфой 4 полого корпуса 2, к выходному валу которого подключен датчик обратной связи 19, аналогичный датчику 17. Манитулятор работает следующим образом. На планшайбу 7 устанавл1шается и закрепляется свариваемое изделие. Электродвигатели 14 н 15, получая сигналы от системы программного згправлення, вращают планшайбу и наклоняют ее в нужное положение, обеспечивая сварку пространственного шва в зависимости от требований программы. При этом, если необходимо только наклонять планишйбу, то валы двигателей 14 и 15 вращаются в одну сторон если в результате неравномерн9сти нагрузки на планшайбу (неравномерности сил трения ипи по другим причинам) планшайба приходит в движение, сигнал об поступает от датчика 17, и на соответствующий двигатель поступает дополнительш й сигнал от системы программного управления, ускоряющий или замедляющий вращение его вала, и планшайба возвращается в первоначальное положение. Бели необходимо только вращать планшайбу, то валы двигателя 14 и 15 вращаются в разные стороны, при этом за неподвижностью оси наклона следит датчик обратной связи IV. В общем же случае происходит и наклон и вращеиие плаишайбы одновременно, при этом валы двигателей 14 и 15 вращаются с разными скоростями как по направлению, так и по абсолютному значению в соответствии с программой. Якори электродвигателей 14 и 15 соединяются последовательно н питаются от одного регулятора скорости. Вследствие последовательного соединения якорей при неравномерной нагрузке левого и правого привода происходит перераспределение напряжения между якорями, н нагрузкн электродвигателей уравниваются, что приводит к более полному использованию двух электродвигателей. Обмотки возбуждения электродвигателей соединяются согласно при наклоне планшайбы, что обеспе-о чивает вращение электродвигателей в одну сторону н встречно при вращении планшайбы.
что обеспечивает вращение электродвигателей в разнь е стороны.
Введение дополнительного привода позволяет избавиться от муфты и тормоза, причем суммарная мощность обоих приводов не превышает мощности одного привода, предназначенного для наклона и вращения планшайбы, так -гак в данном случае оба привода работают совместно при наклоне, вращая выходны шестерни в одну сторону, а при вращении в разные стороны - создавая пару сил, это позволяет уменьшить габариты, так как два двигателя меньшей мощности могут быть установлены с обеих сторон матптупятора, вписываясь в габариты планшайбы.
Наличие датчиков обратной связи, подключенных к цапфам корпуса и валу планшайбы при помощи мультипликаторов дают возможность, подбирая разные скорости вращения валов двигателей и контролируя исполнение при помощи датчиков обратной связи, производить одновременно вращение и наклон планшайбы. Следует отметить, что датчики обратной связи не усложняют конструкцию, так как в манипуляторах с программным управлением их присутствие все равно является обязательным.
Так как я данном. сл%чзе применяется мно1ч двигательное соединение привода с объектом управлетш (планшайбой) утерся повысить предельные динамические возможности данной следящей системы и расширить возможности применения манипулятора с программным управлением.
Формула изобретення
.iV
21496
пла пшйбу с шестерней и валом, смонтяроввнкым 8 корпусе, установленный на одной из привод вращения и наклона планшайбы, выхо;щая шестерня которого смонтирована на 5 соответствующей этой стойке цапфе с возможностью взаимодействия с шестерней планшайбы, а также механизм фиксации цапф корпуса, установленный на второй стойке, и механизм фиксации вала планшайбы, закрепленный на корпусе, отличающийся тем, что,
to с целью повышения надежности мантулятора путем улучшения динамических харак теристик привода, манипулятор снабжен дополшггельным приводом вращения и наклона планшайбы, установленным на вторсЛ стойке,
15 при эт(ж выходная шестерня дополнительного привода смонтировага на цапфе второй стойки с возможностью взаимодействия с шестерней планшайбы, а механизмы фиксации выполнены в. В1ще мультипликаторов с датчиками обрат20ной связи.
25 переключения на последовательное и параллельное соединение.
Источники информации, принятые во внимание при зкспертизе
iput.i
