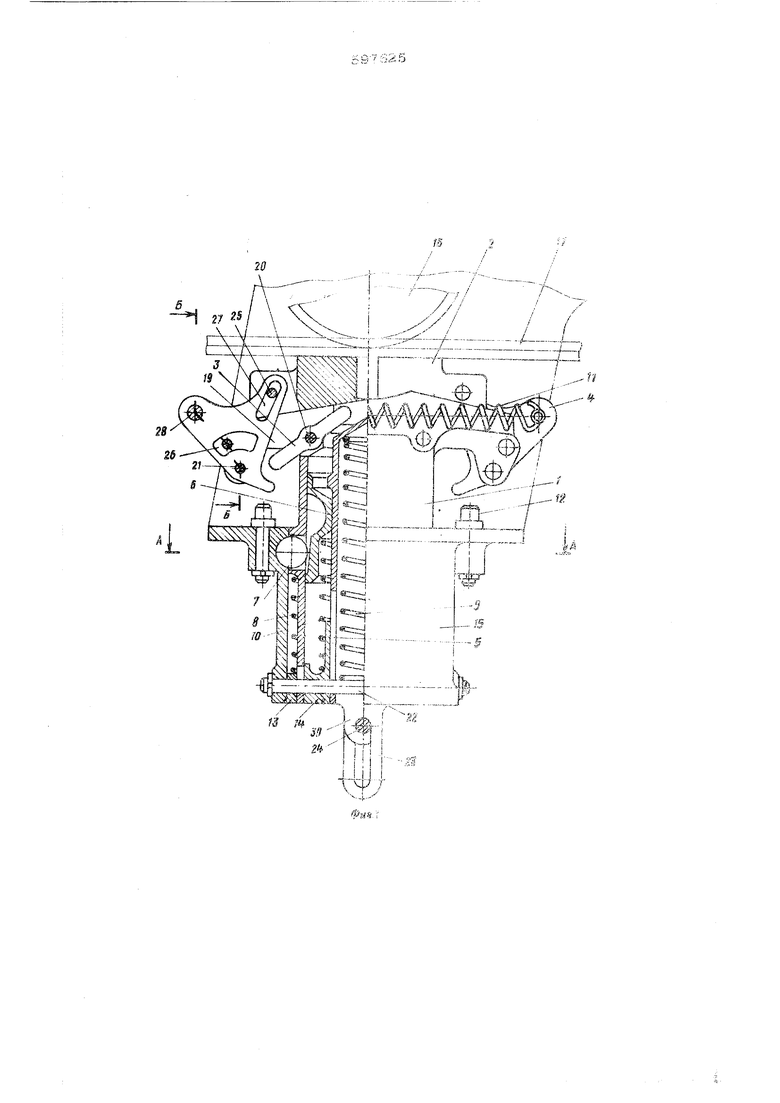
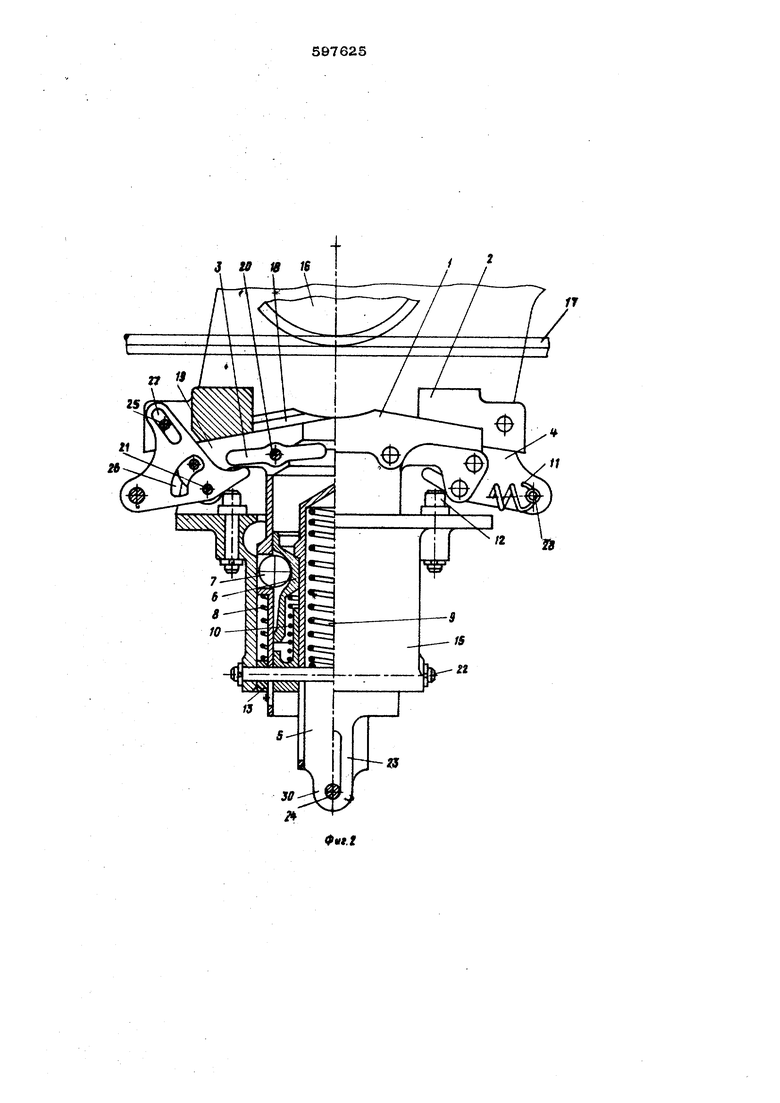
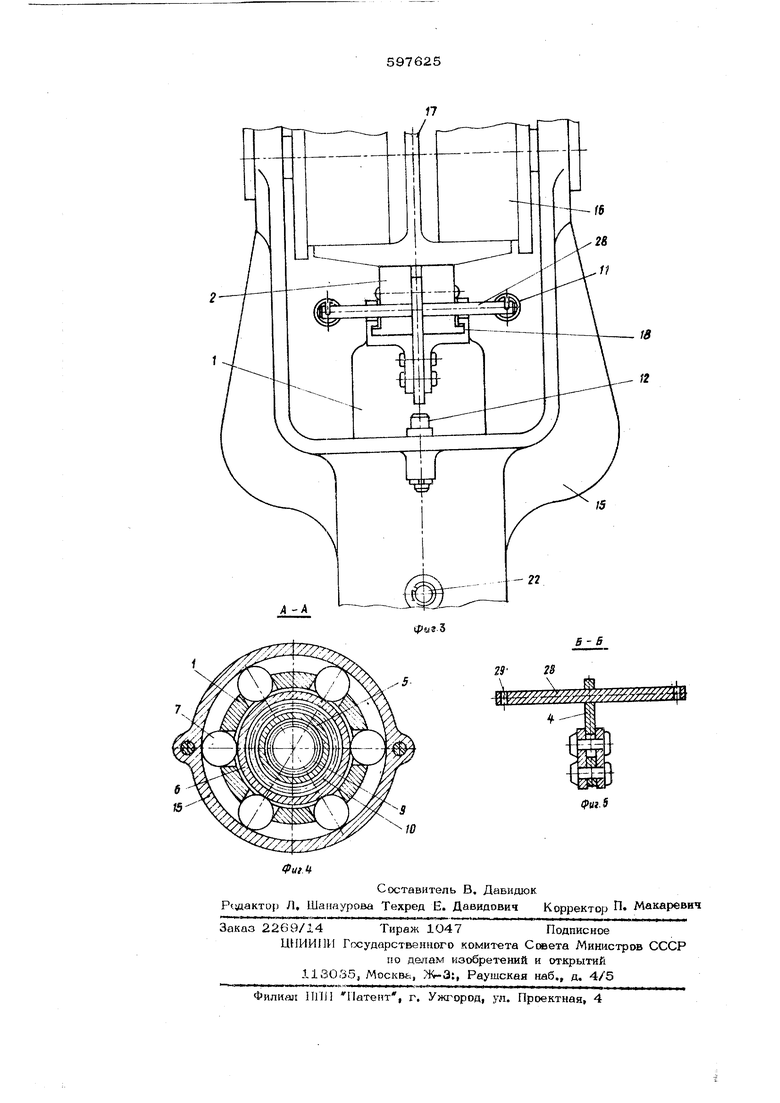
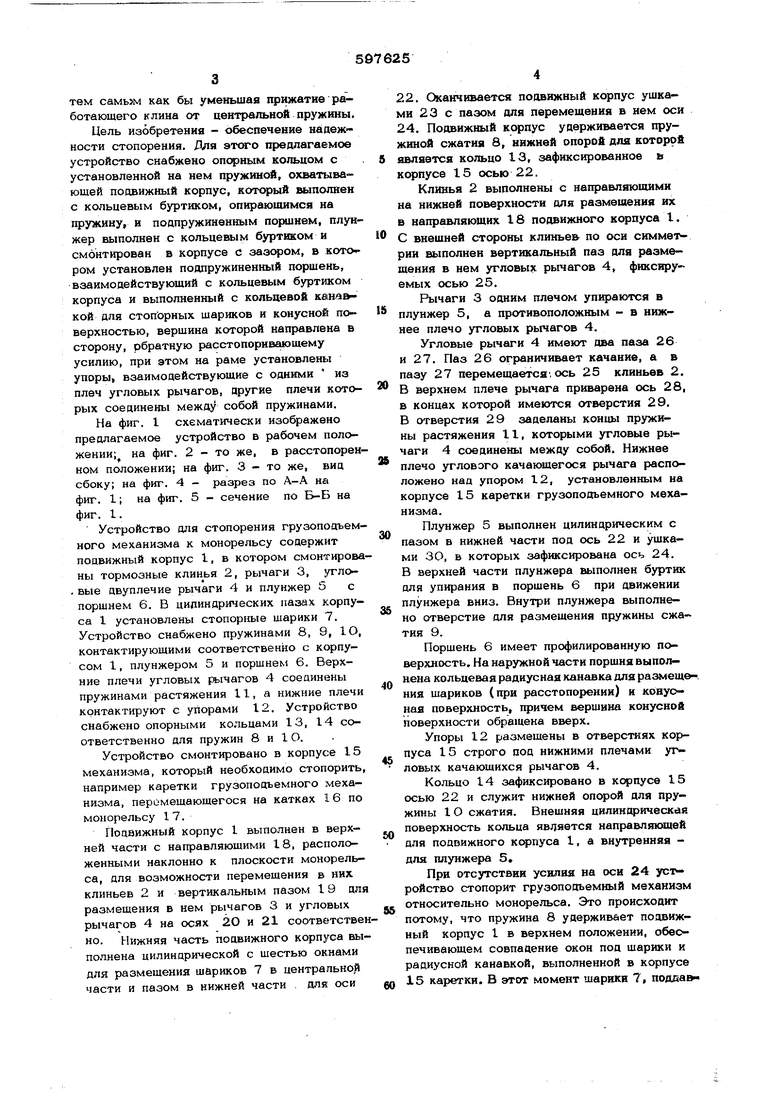
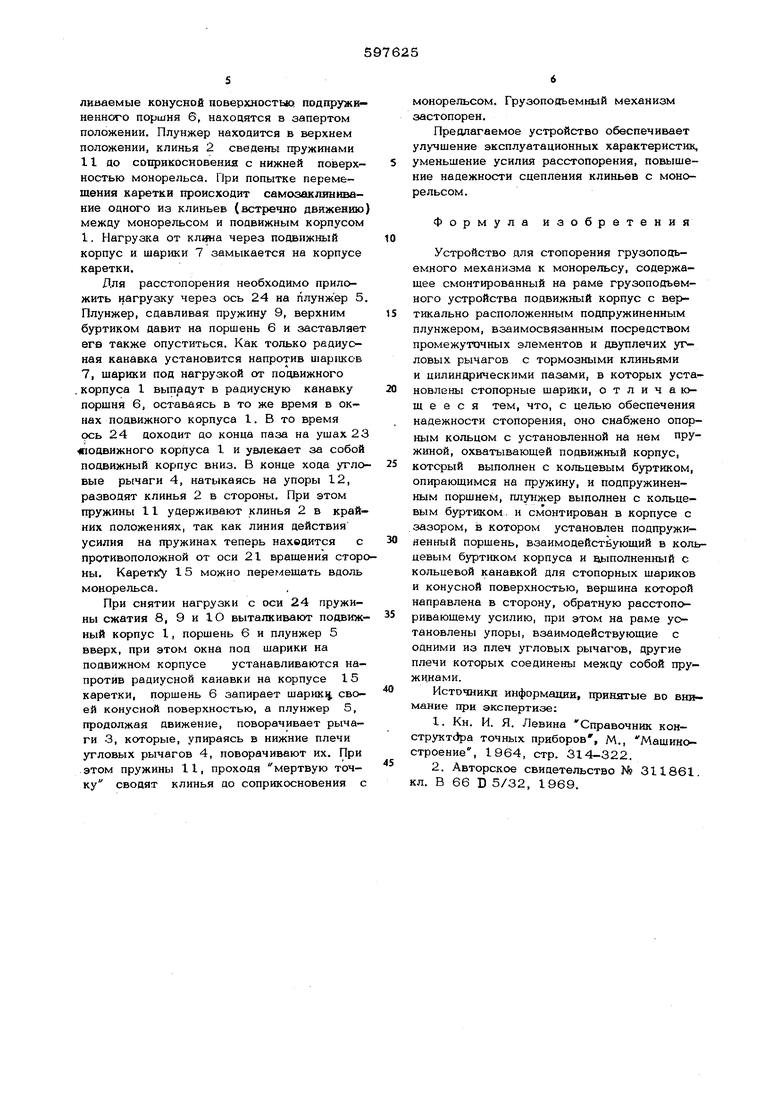
тем как бы уменьшая прижатие работающего клина от цеитральной пружины. Цель изобретения - обеспечение нааеж ности стопорения. Для этснго предлагаемое устройство снабжено оперным кольцом с установленной на нем пружиной, охватывающей подвижный корпус, котсфый наполнен с кольцевым буртиком, опирающимся на пружину, и подпружиненным порщнем, плун жер выполнен с кольцевым буртиком и смонтирован в корпусе с зазором, в кото ром установлен подпружиненный поршень, взаимодействующий с кольцевым буртиком корпуса и выполненный с кольцевой для стопорных шариков и конусной поверхностью, вершина которой направлена в сторону, рбратную расстопориваюшему усилию, при этом на раме установлены упоры, взаимодействующие с одними из плеч угловых рычагов, другие плечи кото рых соединены межд5 собой пружинами. На фиг. I схематически изображено предлагаемое устройство в рабочем положении; на фиг. 2 - то же, в расстопорен ном положении; на фиг. 3 - то же, вид сбоку; на фиг. 4 - разрез по А-А на фиг. 1; на фиг. 5 - сечение по Б-Б на фиг. 1. Устройство для стопорения грузоподъем ного механизма к монорельсу содержит подвижный корпус 1, в котором смонтирова ны тормозные клинья 2, рычаги 3, утпо. вые двуплечие рычаги 4 и плунжер 5 с поршнем 6. В цилиндрических пазах корпуса 1 установлены cTonopfOiie шарики 7. Устройство снабжено пружинами 8, 9, Ю, контактирующими соответственно с корпусом 1, плунжером 5 и поршнем 6. Верхние плечи угловых рычагов 4 соединены пружинами растяжения 11, а нижние плечи контактируют с упорами 12. Устройство снабжено опорными кольцами 13, 14 соответственно для пружин 8 и 10. Устройство смонтировано в корпусе 15 механизма, который необходимо стопорить например каретки грузоподъемного механизма, перемещающегося на катках 16 по монорельсу 17. Поцвижный корпус 1 выполнен в верхней части с направляющими 18, расположенными наклонно к плоскости монорельса, для возможности перемещения в них клиньев 2 и вертикальным пазом 19 для размещения в нем рычагов 3 и угловых рычагов 4 на осях 2О и 21 соответстве но. Нижняя часть подвижного корпуса вы полнена цилиндрической с шестью окнами для размещения шариков 7 в центральной части и пазом в нижней части . для оси 22. Оканчивается подвижный корпус ушками 23 с пазом для перемещения в нем оси 24. Подвижный корпус удерживается пружиной сжатия 8, нижней опорой дла которой является кольцо 13, зафиксированное ь корпусе 15 осью 22. Клинья 2 выполнены с направляющими на нижней поверхности для размещения их в направляющих 18 подвижного корпуса 1. С внешней стороны клинье& по оси симметрии выполнен вертикальный паз для размещения в нем угловых рычагов 4, фиксиру- емых осью 25. Рычаги 3 одним плечом упираются в плунжер 5, а противоположным - в нижнее плечо угловых рычагов 4. Угловые рычаги 4 имеют два паза 26 и 27. Паз 26 ограничивает качание, а в пазу 27 перемещается; ось 25 клиньев 2. В верхнем плече рычага приварена ось 28, в концах которой имеются отверстия 29. В отверстия 29 заделаны концы пружины растяжения 11, которыми угловые рычаги 4 соединены между собой. Нижнее плечо углового качающегося рьпага расположено над упором 12, установленным на корпусе 15 каретки грузоподъемного механизма. Плунжер 5 выполнен цилиндрическим с пазом в нижней части под ось 22 к ушками ЗО, в которых зафиксирована ось 24. В верхней части плунжера выполнен буртик для упирания в поршень 6 при движении плунжера вниз. Внутри плунжера выполнено отверстие для размещения пружины сжатия 9. Поршень 6 имеет профилированную поверхность. На наружной части поршня выполнена кольцевая радиусная канавка для размещ -. ния шариков (при расстопорении) и ковуо ная поверхность, причем вершина конусной поверхности обращена вверх. Упоры 12 размешены в отверстиях корпуса 15 строго под нижними плечами угловых качающихся рычагов 4. Кольцо 14 зафиксировано в корпусе 15 осью 22 и служит нижней опорой для пружины 10 сжатия. Внешняя цилиндрическая поверхность кольца является направляющей для подвижного корпуса 1, а внутренняя для плунжера 5, При отсутствии усилия на оси 24 устройство стопорит грузоподъемный механизм относительно монорельса. Это происходит потому, что пружина 8 удерживает подвижный корпус 1 в верхнем положении, обеспечивающем совпадение окон под шарики и радиусной канавкой, выполненной в корпусе 15 каретки. В этот момент шарики 7, поддав лиааемые конусной новерхностью подпружиненного поршня 6, нахоцятся в запертом положении. Плунжер находится в верхнем положении, клинья 2 сведены пружинами 11 до соприкосновения с нижней поверхностью монорельса. При попытке перемещения каретки происходит самозаклинивание одного из клиньев (встречно движению между монорельсом и подвижным корпусом 1, Нагрузка от кл1|на через подвижный корпус и шарики 7 замыкается на корпусе каретки. Для расстопорения необходимо приложить нагрузку через ось 24 на плунжер 5 Плунжер, сдавливая пружину 9, верхним буртиком давит на поршень 6 и заставляет егв также опуститься. Как только радиусная канавка установится напротив uiapiucoB 7, шарики под нагрузкой от подвижного . корпуса I выпадут в радиусную канавку поршня 6, оставаясь в то же время в окнах подвижного корпуса I. В то время ось 24 доходит до конца паза на ушах 23 «1ОДВИЖНОГО корпуса I и увлекает за собой подвижный корпус вниз. В конце хода угло вые рычаги 4, натыкаясь на упоры 12, разводят клинья 2 в стороны. При этом пружины 11 удерживают клинья 2 в крайних положениях, так как линия действия усилия на пружинах теперь нахвдится с противоположной от оси 21 вращения сторо ны. Каретку 15 можно перемещать вдоль монорельса. При снятии нагрузки с оси 24 пружины сжатия 8, 9 и Ю выталкивают подвижный корпус 1, поршень 6 и плунжер 5 вверх, при этом окна под шарики на подвижном корпусе устанавливаются напротив радиусной канавки на корпусе 15 каретки, поршень 6 запирает шарик своей конусной поверхностью, а плунжер 5, продолжая движение, поворачивает рычаги 3, которые, упираясь в нижние плечи угловых рычагов 4, поворачивают их. При этом пружины 11, проходя мертвую точку сводят клинья до соприкосновения с монорельсом. Грузоподъемный механизм застопорен. Предлагаемое устройство обеспечивает улучшение эксплуатационных характеристик, уменьшение усилия расстопорения, повышение надежности сцепления клиньев с монорельсом. Формула изобретения Устройство для стопорения грузоподъемного механизма к монорельсу, содержащее смонтированный на раме грузоподъемного устройства подвижный корпус с вертикально расположенным подпружиненным плунжером, взаимосвязанным посредством промежуточных элементов и двуплечих угловых рычагов с тормозными клиньями и цилин фическими пазами, в которых установлены стопорные шарики, о т л и ч а ющ е 8 с я тем, что, с целью обеспечения надежности стопорения, оно снабжено опорным кольцом с установленной на нем пружиной, охватывающей подвижный корпус, который выполнен с кольцевым буртиком, опирающимся на пружину, и подпружиненным поршнем, плунжер выполнен с кольцевым буртшсом. и смонтирован в корпусе с зазором, в котором установлен подпружиненнъ1й поршень, взаимодействующий в кольцевым буртиком корпуса и выполненный с кольцевой канавкой для стопорных шариков и конусной поверхностью, вершина которой направлена в сторону, обратную расстопориваюшему усилию, при этом на раме установлены упоры, взаимодействующие с одними из плеч угловых рычагов, другие плечи которых соединены между собой пружинами. Источники информации, принятые во внимание при экспертизе: 1.Кн. И. Я. Левина Справочник конструктфа точных приборов , М., Машиностроение, 1964, стр. 314-322. 2.Авторское свидетельство № 311861 кл. В 66 D 5/32, 1969.
| название | год | авторы | номер документа |
|---|---|---|---|
| РУЛЕВОЙ ПРИВОД ЛЕТАТЕЛЬНОГО АППАРАТА | 1976 |
|
SU1840183A1 |
| АВИАЦИОННОЕ КАТАПУЛЬТНОЕ УСТРОЙСТВО | 1998 |
|
RU2130866C1 |
| Устройство для стопорения грузоподъемного механизма на монорельсе | 1979 |
|
SU919981A1 |
| РУЧНОЙ ГИДРАВЛИЧЕСКИЙ РЕЗАК | 1997 |
|
RU2121433C1 |
| Устройство к протяжным станкам для закрепления нежестких деталей | 1985 |
|
SU1329925A1 |
| ЗАХВАТНОЕ УСТРОЙСТВО | 2008 |
|
RU2369555C1 |
| АВТОМАТИЧЕСКИЙ ЗАХВАТ РОДОВИКОВА | 2009 |
|
RU2394747C1 |
| КЛАПАН РЕДУКЦИОННЫЙ | 2009 |
|
RU2406903C1 |
| МУЛЬТИПЛИКАТОР | 2003 |
|
RU2250193C1 |
| ГИДРАВЛИЧЕСКИЙ ПОДЪЕМНИК | 2005 |
|
RU2297382C2 |