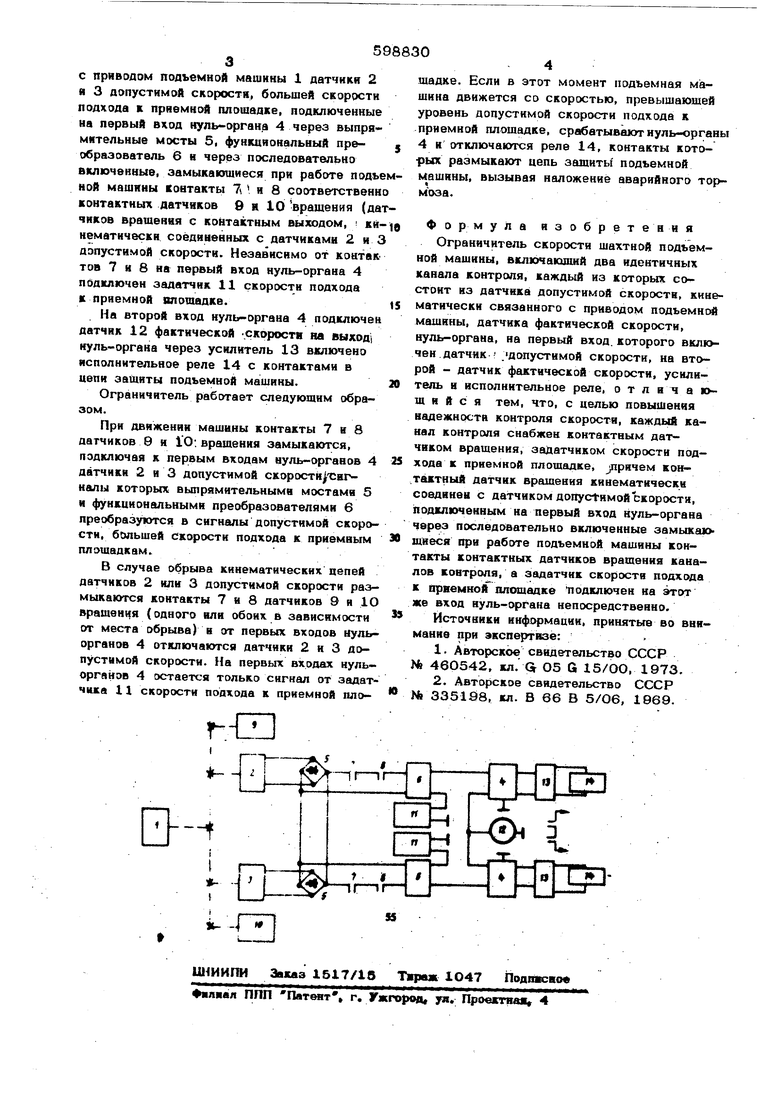
с приводом подъемной машины 1 датчики 2 я 3 допустимой скоростя, большей скорости подхода к приемной плошадке, подключенные на первый вход нуль органа 4 через выпрямительные мосты 5| функциональный преобразователь 6 и через последовательно включенные, замыкающиеся при работе подъе ной машины контакты 7s и 8 соответственно контактных датчиков О я 10 вращения (дат чиков вращения с контактным выходом, кйнематически соединенных с датчиками 2 и 3 допустимой скорости. Независимо от кантак тов 7 и 8 на первый вход нуль-органа 4 подключен задатчик 11 скорости подхода к приемной олотаадке. На второй вход нуль-органа 4 подключен датчик 12 фактической скорости на выход нуль-органа через усилитель 13 включено исполнительное реле 14 с контактами в цепи зашиты подъемной машины. Ограничитель работает следующим образом. При движении машины контакты 7 и 8 датчиков 8 и 10: вращения замыкаются, подключая к первым входам нуль-органов 4 датчики 2 и 3 допустимой скоростй|Снгналы которых выпрямительными мостами 5 и функциональными преобразователями 6 преобразуются в сигналы допустимой скорости, большей скорости подхода к приемным площадкам. В случае обрыва кинематических депей датчиков 2 или 3 допустимой скорости размыкаются контакты 7 и 8 датчиков 9 и 1О вращения (одного или обоих в зависимости от места обрыва) и от первых входов йульорганов 4 отключаются датчики 2 и 3 допустимой скорости. На первых входах нульорганов 4 остается только сигнал от задатчнка 11 скорости подхода к приемной плошадке. Если в этот момент подъемная Miaшина движется со скоростью, превышающей уровень допустимой скорости подхода к приемной площадке, срабатывают нуль-органы 4 и отключаются реле 14, контакты которых размыкают цепь зашиты подъемной машины, вызывая наложение аварийного тормоза. Ф о р м уЛа изобрет е н и я Ограничитель скорости шахтной подъемной машины, включаюшшй два идентичных канала контроля, каждый из которых состоит из датчика допустимой скорости, кине матически связанного с приводом подъемней машины, датчика фактической скорости, нуль-органа, на первый вход, которого включен датчик .допустимой скорости, на второй - датчик фактической скорости, усилитель и исполнительное реле, о т л и л а и и с я тем, что, с целью повышения надежности контроля скорости, каждый канал контроля снабжен контактным датчиком вращения, заДатчиком скорости подхода к приемной площадке, рнчем контактный датчик вращения кинематически соединен с датчиком допустимойскорости, лодключеиным на первый вход нуль-органа через последовательно включенные замыкающиеся при работе подъемной машины коктакты контактных датчиков вращения каналов контроля, а задатчик скорости подхода к 11рвемно|Г площадке Подключен на этот же вход нуль-органа непосредственно. Источники инф.ормации, принятые во внимание при экспертизе: 1.Авторское свидетельство СССР J 460542, кл. Gr OS G 15/ОО, 1973. 2.Авторское свидетельство СССР Ml 335198, кл. В 66 В 5/О6, 1969.
| название | год | авторы | номер документа |
|---|---|---|---|
| Ограничитель скорости шахтной подъемной машины | 1984 |
|
SU1188073A2 |
| Ограничитель скорости шахтной подъемной машины | 1981 |
|
SU1084223A1 |
| Устройство управления тормозом шахтной подъемной машины | 1989 |
|
SU1676981A1 |
| Устройство аврийного отключения при обрыве или стопорении цепи конвейера | 1979 |
|
SU875029A1 |
| ЭЛЕКТРИЧЕСКИЙ ОГРАНИЧИТЕЛЬ СКОРОСТИ ШАХТНОЙ ПОДЪЕМНОЙ МАШИНЫ | 1972 |
|
SU335198A1 |
| Устройство управления тормозом шахтной подъемной машины | 1988 |
|
SU1583342A1 |
| Устройство для управления тормозом шахтной подъемной машины | 1989 |
|
SU1717513A1 |
| Устройство для защиты трехфазной электроустановки от анормальных режимов | 1990 |
|
SU1788549A1 |
| Устройство для автоматического выбора направления движения объекта | 1984 |
|
SU1184768A1 |
| Реверсивный тиристорный электропривод переменного тока | 1970 |
|
SU505112A1 |
