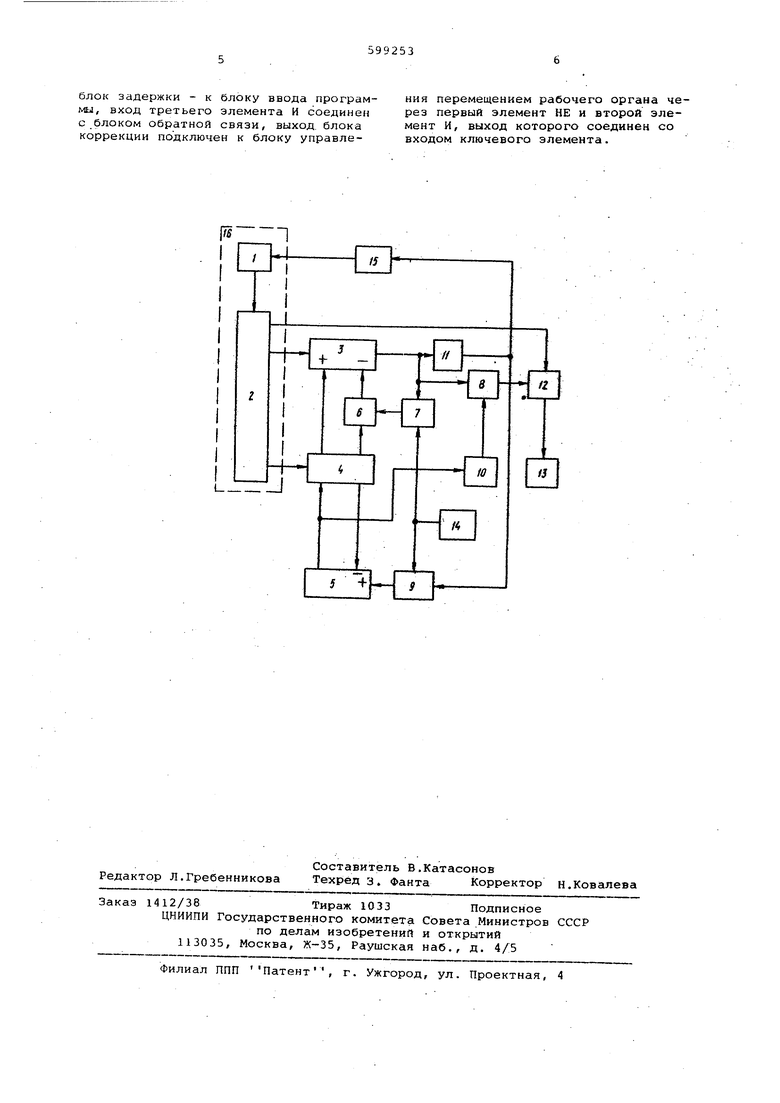
(54) УСТРОЙСТВО ДЛЯ ПРОГРАММНОГО УПРАВЛЕНИЯ ПЕРЕМЕЩЕНИЕМ РАБОЧЕГО ОРГАНА СТАНКА Устройство содержит блок 1 опроса, блок 2 задания программы, блок 3 управления перемещением рабочего органа, блок 4 памяти, блок 5 коррекции, элемент ИЛИ б, первый 7, второй 8 и третий 9. элементы И, первый 10 и второй 11 элементы НЕ. Ключевой элемент 12, привод 13 рабочего органа, блок 14 обратной связи и блок 15 задержки, блок опроса и блок задания программы образуют блок 16 ввода прог раммы , Устройство работает следующим образом. Сигналом с блока 1 опроса считывается информация с блока 2 задания про граммы. Информация о величинеперемещения записывается в блок 3 управления перемещением рабочего органа, при этом на его выходе высокий потенциал через элемент И 8 подготавливает ключевой элемент 12 и установка клапанадросселя (на чертеже не показан) привода рабочего органа в положение, определяемое соответствующей командой задающего устройства. Привод 13 рабочего органа начинает отрабатывать записанную в блоке 3 управления перемещением рабочего органа команду, перемещая рабочий орган, а блок 14 обратной связи формирует импульсы, поступающие через элемент И 7 и элемент ИЛИ б на вычитающий выход блока 3 управления перемещением рабочего органа до тех пор, пока он не обнулится. В момент обнуления на выходе блока 3 управления появляется низкий потенциал,который через элемен И 8 и ключевой элемент 12 отключает привод 13 рабочего органа и через эле менты НЕ 11, И 7и И 9 переключает выход блока 14 обратной связи с вычитающего входа блока 3 управления на суммирующий вход блока 5 коррекции. После отключения привод 13 рабочего органа перемещается на некоторую величину по инерции. В силу этого блок 14 обратной связи формирует импульсы, которые записываются в блок 5 корре.щии, при этом на выходе блока 3 управления появляется высокий потенциал, подготавливающий блок 4 памяти к работе и блокирующий через элементы НЕ 10 и И 8 прохождение сигнала с вых да блока 3 управления на ключевой эле мент 12 и привод 13 рабочего органа, В момент обнуления блока 3 управления сигнал с его выхода через элемент НЕ 11 и блок 15 задержки поступа ет на вход блока 1 опроса. Блок задер ки необходим для того, чтобы следующая команда в блок 3 управления записывалась после остановки рабочего органа во избежание искажения информации в блоке 3 управления. Блок 1 опроса формирует очередной импульс опроса, поступающий в блок 2 задания программы. При этом в блок 3 управления записывается число, соответствующее величине следующего перемещения. После этого это число корректируется на величину, записанную в блоке 5 коррекции. В зависимости от того, совпадает или несовпадает направление данного перемещения с предьщущим, число из блока 5 коррекции подается блоком 4 памяти на вычитающий или суммирующий вход блока 3 управления . Блок 4 памяти управляется командой с выхода блока 2 задания программы. После обнуления блока 5 коррекции низкий потенциал с его выхода прекращает работу блока 4 памяти и через элемент НЕ 10 и И 8 подготавливает ключевой элемент 12 к передаче информации о направлении и скорости движения с блока 2 задания програм1-1ы на привод 13 рабочего органа и цикл повторяется . Сравнительные испытания предлагаеfvioro устройства с известным показали, что оно обеспечивает более высокую точность позиционирования рабочего органа в течение отработки всего цикла программы. Предлагаемое устройство позволяет предотвратить накопление статической ошибки и поэтому применять его наиболее целесообразно в тех случаях, когда программа перемещений рабочего органа в цикле содержит большое число операций . Формула изобретения Устройство для программного управления перемещением рабочего органа станка, содержащее последовательно соединенные блок ввода программы, ключевой элемент, привод рабочего органа и последовательно соединенные блок обратной связи, первый элемент И, элемент ИЛИ и блок управления перемещением рабочего органа, другой вход которого подключен к выходу блока ввода программы, а выход - к первому элементу и, отличающееся тем,что, с целью повы1иения точности устройства, оно содержит блок задержки, первый элемент НЕ, второй элемент И и последовательно соединенные второй элемент НЕ, третий элемент И, блок коррекции и блок памяти, вход которого подключен к выходу блока ввода программы, первый выход - к входу блока управления перемещением рабочего органа, второй выход - к входу элемента ИЛИ, а третий выход.- к входу блока коррекции, вход второго элемента , подключен к блоку управления перемещением рабочего органа, а выход чореэ
блок задержки - к блоку ввода программы, вход третьего элемента И соединен с блоком обратной связи, выход блока коррекции подключен к блоку управления перемещением рабочего органа через первый элемент НЕ и второй элемент И, выход которого соединен со входом ключевого элемента.
У 1
I
