(54) ШАГОВАЯ СИСТЕМА ПРОГРАММНОГО УЛЕРАВЛЕНЙЯ МАНИПУЛЯТОРОМ
| название | год | авторы | номер документа |
|---|---|---|---|
| Шаговая система программного управления многокоординатным манипулятором | 1977 |
|
SU644617A1 |
| Устройство для программного управления | 1978 |
|
SU744464A1 |
| Цифровая система программного управления роботом-манипулятором | 1979 |
|
SU943644A1 |
| Система управления очувствленным копирующим манипулятором | 1978 |
|
SU771609A1 |
| Устройство для стабилизации вакуума | 1983 |
|
SU1149060A1 |
| Устройство управления многокоординатным механизмом | 1981 |
|
SU1001011A1 |
| Устройство для моделирования привода | 1975 |
|
SU551666A1 |
| Устройство для управления сборочным роботом | 1980 |
|
SU875331A1 |
| СИСТЕМА ПРОГРАММНОГО УПРАВЛЕНИЯ СБОРОЧНЫМ УСТРОЙСТВОМ | 1991 |
|
RU2029335C1 |
| Устройство для управления промышленным роботом | 1981 |
|
SU970320A1 |
Изобретение OTHocHtcH к автоматике и вычислительной технике и может быть использова при создании импульсных систем программного управления манипулятором. Известны шаговые системы программного управления манипулятором, содержашйе блок памяти, блок записи, блок воспроизведения, блок формирования команд коммутатор, шаговый двигатель и датчик положения 1. Однако, они имеют сложную структуру при реализации их fra двоичных логических элементах.,. Наиболее близким техни1 еским решением к данному- изобретению является система, содержащая последовательно соединенные блок памяти, первый ключ, блок воспроизведения программы и блок управления, первый и второй выходы которого подключены к cootветстаующим входам первого коммутатора, выход которого соединен со входом шагового двигателя, связанного через исполнительный ор ган с датчиком положения исполнительного органа, последовательно соединенные второй коммутатор, первый элемент задержки, первый элемент ИЛИ и блок записи программы, выход которого подключен ко второму входу первого ключа, второй вь1ход второго коммутатора подключен ко второму входу первого элемента ИЛИ, третий вход которого соединен с первым выходом второго коммутатора 2. Недостатком этой системы является ее невысокая точность, особенно при больших скоростях, вследствие инерционности исполнительного органа и возможных потерь импульсов шаговым двигателем. Цель изобретет ия - повышение топюсти системы. Поставленная цель достигается тем, что система содержит второй ключ, последовательно соединенный второй элемент задержки, реверсивный счетчик, первый деигифратор, i-енератор импульсов и второй элемент ИЛИ и последовательно соединенные второй дешифратор и элемент И, второй вход которого подключен ко входу второго элемента задержки и третьему выходу блока упрянлемия, а выходко второму входу второго элемента ИЛИ,
ВЫХОД которого соединен с третьим входом первого коммутатора, вход второго ключа подключен к выходу датчика положения исполнительного органа, первый выход - ко входу второго коммутатора, а второй выход - ко второму входу реверсивно. го счетчика, выход которого соединен со входом первого и второго дешифраторов.
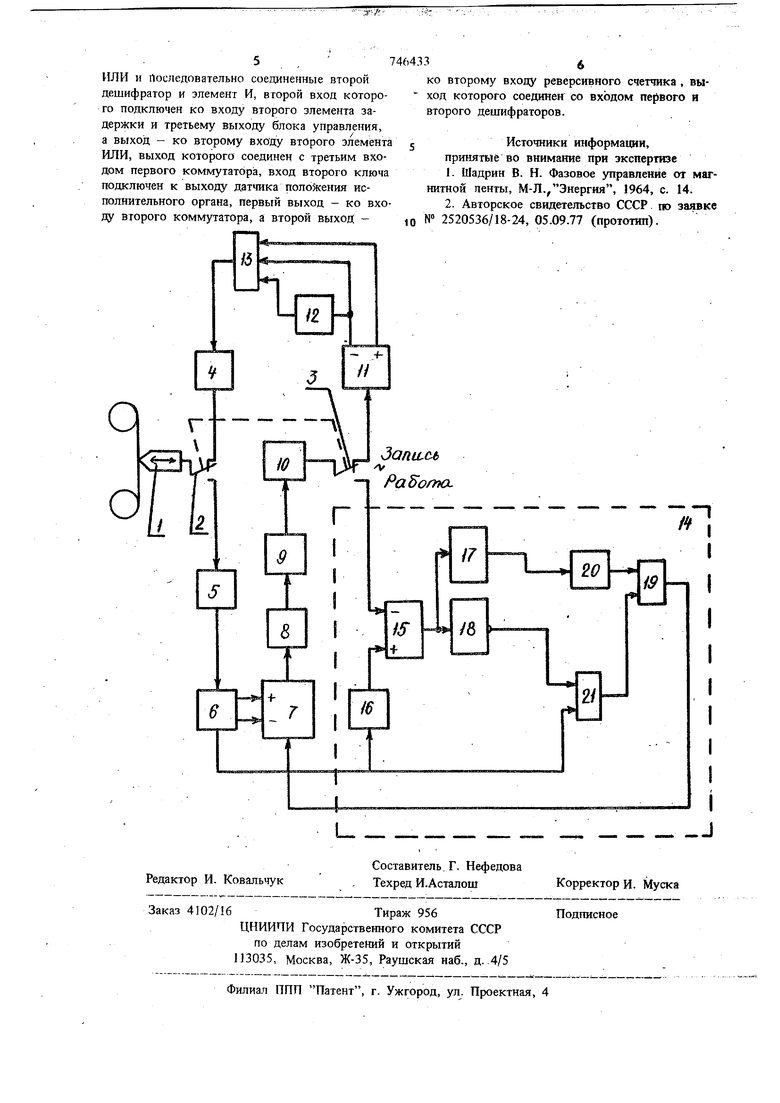
На чертеже представлена функциональная схема системы (по од1гой координате манипулятора) .
Она содержит блок 1 памяти, первь1Й ключ 2, второй ключ 3, блок 4 записи программы, блок 5 воспроизведения программы, блок б управления, первый коммутатор 7, шаговый двигатель 8, исполнительный орган 9, датчик 10 положения исполнительного органа, второй коммутатор 11, первый элемент 12 задержки, первый элемент 13 ИЛИ, блок 14 коррекции, реверсивный счетчик 15, второй элемент 16 задержки, первый дешифратор 17, второй дешифратор 18, второй элемент 19 ИЛИ, генератор 20 импульсов, элемент 21 И.
Шаговая система работает следующим образом.
При установке ключей 2 и 3 в положение запись и перемещении рабочего органа по требуемой траектории импульсный датчик 10 положения действительного положения формирует импульсы, которые через второй коммутатор 11, первый элемент 12 задержки и первый элемент 13 ИЛИ поступают в блок 4 записи.
В результате в блок I памяти записываются все перемещения исполнительного органа 9, по каждой координате на отдельную дорожку магнитной ленты. Сигналы прямого перемещения записываются одиночными импульсами, а сигналы обратного перемещения - двойными.
Для воспроизведения программы устанавливают ключи 2 и 3 в положение работа. Считанн ге блоком 5 воспроизведения импульсы поступают на блок 6 управления, который формирует команды управления первым коммутатором 7 (прямое и обратное перемещение) и импульсные последовательности соответствующие перемещением, которые через блок 14 коррекции поступают на информационный вход коммутатора 7 шагового двигателя и далее отрабатываются шаговым двигателем 8. С импульсного датчика 10 положения на вычитающий вход реверсивного счетчика 15 поступают импульсы, соответствующие действительньтм перемещениям Исполнительного органа 9. На суммирующий вход реверсивного счетчика 15 поступают задержанные вторым элементом 16 задержки им пульсы программы. Время задержки выбирается
соответствующим ияерционности шагового
двигателя 8 и исполнительного органа 9, поэтому при точном воспроизведении программы
334
реверсивный счетчик 15 находится в нулевом состоянии. В случае, если число импульсов, поступивших на вычитающий вход, меньше числа импульсов, поступающих на суммирующий вход,
что свидетельствует об отставании исполнительного органа 9, например из-за потерь импульсов шаговым двигателем, реверсивный счетчик 15 (в данном примере шестиразрядный) устанавливается последовательно в состоянии
000001, 000010, 000011 и т.д., тго выявляется первым дешифратором 17, который включает генератор 20 импульсов. Импульсы коррекции с генератора 20 .импульсов поступают через второй элемент 19 ИЛИ вместе с импульсами программы на первый коммутатор 7 и отрабатыва- , ются шаговый двигателем 8. Импульсы коррекции выдаются генератором 20 импульсов до тех пор, пока не будет обнулен реверсивный счетчик 15 (ошибка скорректирована). В случае, если имеет место пробег исполнительного органа 9, соответствующей разностью импульсов реверсивный счетчик 15 устанавливается последовательно в состояния 111111, 111110, 111,101 и т.д. Такие состояния счетчика выявляются
вторым дешифратором 18, на инверсном выходе которого исчезает сигнал и элемент 21 И запирается, предотвращая подачу следующих импульсов программ на шаговый двигатель 8 до тех пор, пока ими не будет скомплексирована ошибка (счетчик 15 обнулился).
Применение изобретения позволит повысить точность позиционирования манипулятора.
Формула изобретения
Шаговая система программного управления манипулятором, содержащая последовательно
соединенные блок памяти, первый ключ, блок воспроизведения программы и блок управления, первь й и второй выходы которого подключены к соответствующим входам первого коммутатора, выход которого соединен со вводом щагового двигателя, связанного через исполнительный орган с датчиком положения исполнительного
0{)гана, последовательно соединенные второй коммутатор, первый элемент задержки, первый элемент ИЛИ и блок записи программы , выход которого подключен ко второму входу первого ключа, второй выход второго коммутатора подключен ко второму входу первого элеменга ИЛИ, третий. вход которого соединен с первым выходом второго коммутатора, о г ли ч а ющ а я с я тем, что, с целью повьппения точности системы, она содержит второй ключ, последовательно соединенные второй элемент задержки, реверсивный счетчик, первый дешифратор, генератор импульсов и второй элемент
