1
Изобретение относится к области приборостроения, а именно к стендам для испытания шаговых двигателей.
Известны установки для испытания следящих систем, в том числе шаговых двигателей.
Одна из таких установок содержит блок управления движением вала двигателя, циклический датчик фактического положения вала и блок регистрации, в котором происходит сравнение фактического и заданного положения вала двигателя 1. Недостатком указанной установки является отсутствие средств для выделения низкочастотной составляющей рассогласования между заданным и фактическим углом поворота вала, а также средств для регистрации величины указанной составляющей в заданный момент времени, что снижает точность и усложняет процесс измерения при использовании этих устройств для диагностики И контроля работы шагового двигателя.
Наиболее близкой по технической сущности к предлагаемой является установка для испытаний шагового двигателя, содержащая блоки управления и регистрации и циклический датчик положения 2.
Недостатком указанной выше установки также является отсутствие в ней средств для выделения низкочастотной составляющей рассогласования и средств для регистрации величины указанной составляющей в заданный момент времени, что снижает точность измерения при использовании указанной установки для диагностики и контроля работы шагового
двигателя в реальных условиях эксплуатации, когда движение выходного элемента шагового двигателя сопровождается его интенсивными, например близкими к резонансным, колебаниями, высокочастотные составляющие которых
имеют, как правило, непериодический или случайный характер. В результате, когда из-за отсутствия достаточного количества времени практически невозможна дополнительная длительная математическая обработка результатов испытаний, необходимая для определения низкочастотной составляющей рассогласования в испытываемом двигателе, точность диагностики и контроля работы шагового двигателя в реальных условиях эксплуатации низки.
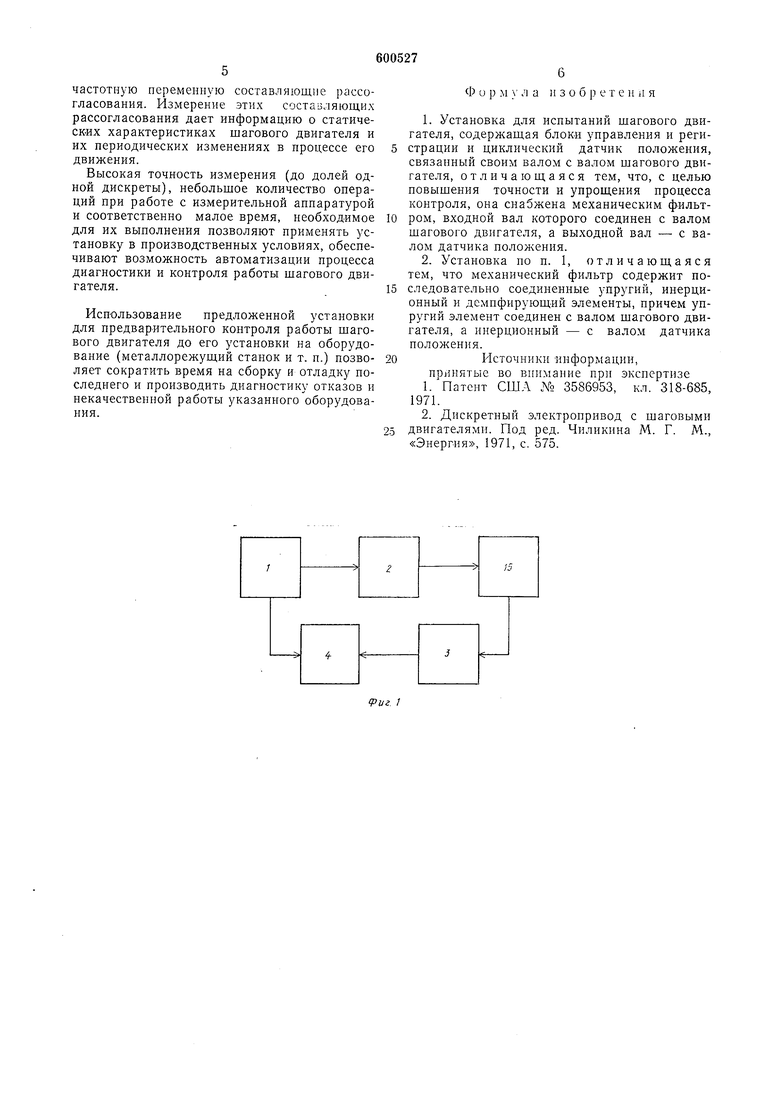
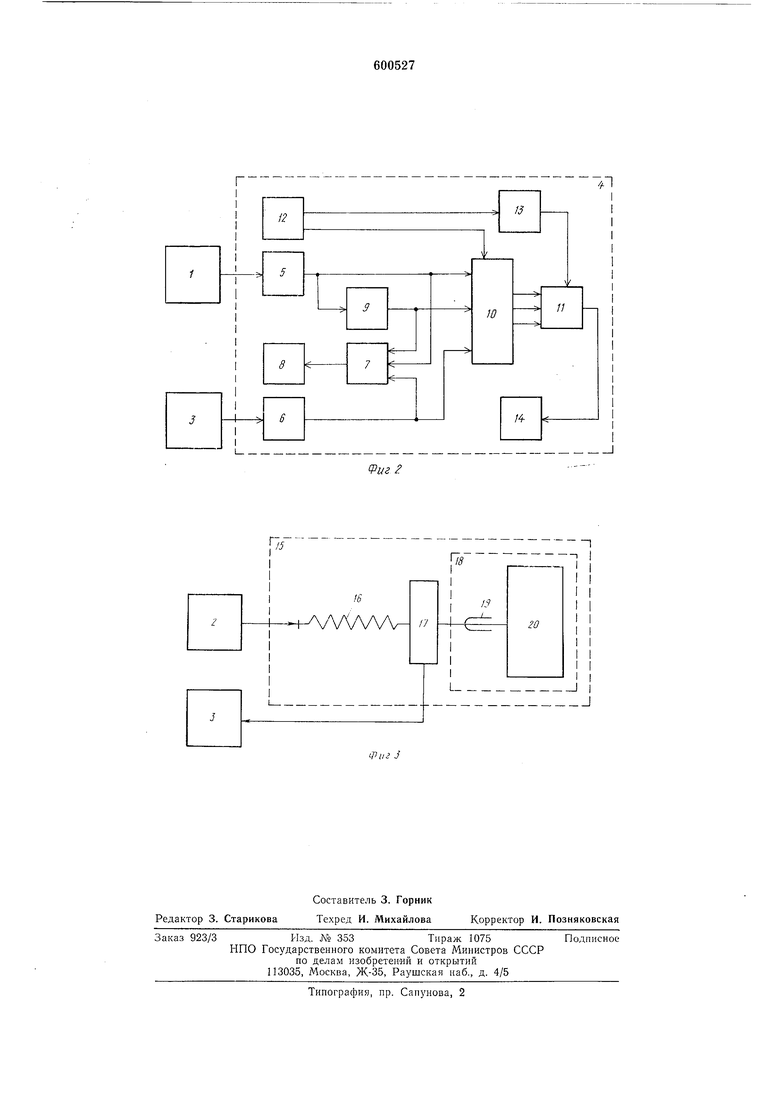
Целью изобретения является повышение точности и упрощение процесса контроля. Указанная цель достигается тем, что установка снабжена механическим фильтром, входной
вал которого соединен с валом шагового двигателя, а выходной вал - с валом датчика положения; механический фильтр содержит последовательно соединенные упругий, инерционный и демпфирующий элементы, причем
упругий элемент соединен с валом шагового двигателя, а инерционный элемент - с валом датчика положения. Такое выполнение установки обеспечивает повышение точности измерения (до долей одной дискреты) рассогласования двигателя путем выделения низкочастотной составляющей, имеющей меньший разброс случайных значений, а также упрощение процесса контроля работы шагового двигателя вследствие возможности получения информации в цифровой форме за короткий срок ири минимальном количестве измерительной техники. Иа фиг. I приведена структурная схема установки; на фиг. 2 - структурная схема блока регистрации; на фиг. о - схема механического фильтра. остановка для испытания шагового двигателя содержит олок 1 управления испытуемым двигателем л, циклический датчик 6 положения И блок i регистрации. лок 4 регистрации содержит формирователи b и b входных сигналов, формирователь / широтно-модулированного сигнала, анализатор «, делитель у, блок 1U обработки сигналов, реверсивный счетчик 11, пульт .2. управления, генератор 15 тактовых импульсов и счетчик И импульсов. Механический фильтр 15 состоит из последовательно соединенных упругого элемента Iti, инерционного элемента i / и демпфирующего элемента 16, состоящего из звена it), создающего вязкое трение, и дополнительного инерционного звена уи, причем упругий элемент ш соединен с двигателем 2, а инерционный элемент 17 - с датчиком 3. Установка работает следующим образом. Перед началом испытании включается блок у.правления 1, останавливается движение испытуемого двигателя 2 и приводятся в исходное состояние элементы блока регистрации 4. Испытания начинаются включением блока 1 и производятся при задаиных установившихся средних значениях скорости движения двигателя 2. Периодические сигналы от блока управления 1 и циклического датчика 3, имеющие одинаковую цену дискреты, подаются на формирователи 5 и б, от которых импульсные сигналы подаются на формирователь широтно-модулированного сигнала 7 и блок обработки сигналов 10. Импульсные сигналы от формирователя 5 подаются, также на делитель у, с выхода которого сигнал подается на формирователь 7 и блок 10 через заданное число периодов, например, равное числу дискрет на один оборот вала шагового двигателя или один цикл кольцевого коммутатора в блоке управления 1. Заданное число периодов широтно-модулированных сигналов, скважность которых определяется сдвигом во времени между сигналами с формирователей 5 и 6, подается на анализатор 8 от формирователя 7 при поступлении на последний сигнал от делителя 9. Сигналы от блока 10 подаются на входы реверсивного счетчика 11 таким образом, что число, определяемое состоянием счетчика 11, равно мгновенной разности чисел импульсных сигналов, поступивших от формирователей 5 и 6 на блок 1U с момента начала движения. При поступлении сигнала от делителя 9 в блок 10 в последнем подготавливается сигнал «Запрет на доступ сигналов в счетчик 11. Далее, для осгановки счета, подается сигнал от пульта 12 на блок 10, в котором после этого при очередном поступлении сигнала от делителя 9 запрещается прохождение сигналов в счетчик 11. Последующий сигнал от пульта 12 подается на тактовый генератор 13, при работе которого реверсивный счетчик 11 приводится в исходное состояние, а в счетчик И поступают импульсы, число которых определяется состоянием реверсивного счетчика 11 в момент запрета доступа в него сигналов. Механический фильтр 15 выделяет постоянную и низкочастотную составляющие скорости движения двигателя 2, которые в сумме равны скорости движения инерционного элемента 17. Двигатель 2, инерционный элемент 17 и дополнительное инерционное звено 20 имеют равные постоянные составляющие скорости движения. Равенство низкочастотных составляющих движения двигателя 2 и инерционного элемента 17 обеспечивается демпфирующим элементом 18, .сила воздействия которого на элемент 17 обусловлена вязким трением в звене 19 и пропорциональна относительной скорости движения элемента 17 и звена 20. Скорость движения элемента 17 не содержит высокочастотных составляющих, которые отфильтровываются динамической системой последовательно соединенных упругого элемента 16, инерционного элемента 17 и демпфирующего элемента 18. Перемещение элемента 17 с момента начала движения измеряется циклическим датчиком 3. Значение низкочастотной составляющей рассогласования между заданным и фактическим положением выходного элемента шагового двигателя при установившемся процессе его движения определяется но формуле Д 5 (/V + г/ - 05), где б - величина дискреты шагового двигателя 2 и циклического датчика положения 3; N - число, определяемое состоянием реверсивного счетчика 11 в момент запрета доступа в него сигналов; т - отставание во времени сигналов формирователя 6 относительно сигналов формирователя 5; f -средняя частота периодических сигналов от блока управления 1. Совокупность значений указанной выше изкочастотной составляющей рассогласования, измеренных при различных заданных положениях выходного элемента шагового двигателя, определяет собой постоянную и низкочастотную переменную составляющие рассогласования. Измерение этих составляющих рассогласования дает информацию о статических характеристиках шагового двигателя и их периодических изменениях в процессе его движения. Высокая точность измерения (до долей одной дискреты), небольщое количество операций при работе с измерительной аппаратурой и соответственно малое время, необходимое для их выполнения позволяют применять установку в производственных условиях, обеспечивают возможность автоматизации процесса диагностики и контроля работы шагового двигателя. Использование предложенной установки для предварительного контроля работы шагового двигателя до его установки на оборудование (металлорежущий станок и т. п.) позволяет сократить время на сборку и отладку последнего и производить диагностику отказов и некачественной работы указанного оборудования. 5 10 15 20 25 Ф о р м л а и 3 о б р е т е и ii я 1.Установка для испытаний шагового двигателя, содержащая блоки управления и регистрации и циклический датчик полол еиия, связанный своим валом с валом щагового двигателя, отличающаяся тем, что, с целью повышения точности и упрощения процесса контроля, она снабжена механическим фпльтром, входной вал которого соединен с валом щагового двигателя, а выходной вал - с валом датчика положения. 2.Установка по п. 1, отличающаяся тем, что механический фильтр содержит последовательно соединенные упругий, инерционный и демпфирующий элементы, причем упругий элемент соединен с валом щагового двигателя, а инерционный - с валом датчика положения. Источники информации, принятые во внимание при экспертизе 1.Патент США № 3586953, кл. 318-685, 1971. 2.Дискретный электропривод с щаговыми двигателями. Под ред. Чиликина М. Г. М., «Энергия, 1971, с. 575.
| название | год | авторы | номер документа |
|---|---|---|---|
| ШАГОВЫЙ ГРАФОПОСТРОИТЕЛЬ | 1970 |
|
SU272691A1 |
| Устройство для программного управления позиционированием | 1985 |
|
SU1267360A1 |
| Устройство для амортизирующего крепления надстройки к корпусу судна | 1986 |
|
SU1311998A1 |
| Устройство для испытания гибких кабельных изделий на многократные перемотки | 1990 |
|
SU1779949A1 |
| Устройство для контроля механической перегрузки шагового двигателя | 1989 |
|
SU1612371A1 |
| Устройство для управления шаговым двигателем | 1975 |
|
SU699646A2 |
| Позиционный дискретный электропривод | 1985 |
|
SU1352474A1 |
| Интегрирующее устройство | 1977 |
|
SU714415A1 |
| Устройство для считывания гра-фичЕСКОй иНфОРМАции | 1976 |
|
SU798907A1 |
| Двухканальный цифровой регистрирующий девиометр | 1975 |
|
SU661386A1 |
Г,
5
-
Г7;
18
+-wwv
20
.J
