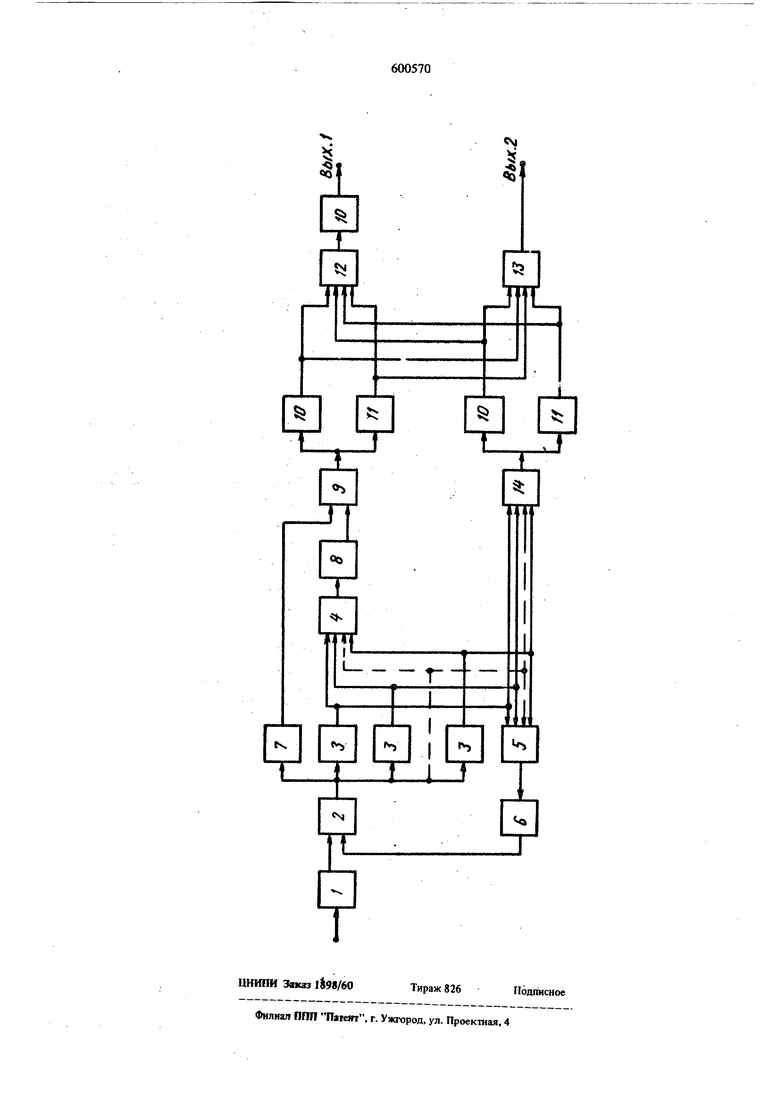
Схема устройства представлена на чертеже. Устрсжство содержит блок 1 задания граничных условий, сумматор 2, блоки 3 моделирования гармоник, сумматоры 4, 5, блок 6 коррекции, инвертор 7, дифференцирующее звено 8, сумматор 9 блоки 10 моделирования волнового сопротивления блоки 11 задания граничных условий на конце, су AtaTopbi 12-14. Выход блока 1 задания граничных условий подключен к первому входу первого сумматора 2 выход которого через блоки 3 моделирования гар мсйппс соединен со входами второго сумматора 4, вход блока 6 коррекции соединен с выходом сум матора 5, а выход - со входом сумматора 2, выход которого через инвертор 7 подключен к первому входу сумматора 9, второй вход которого через дифференцируницее звено 8 соединен с выходом сумматора 4. Выход сумматора 9 через пер вые блоки 10 моделирования волнового сопротивления и блок 11 задания граничных условий на конце подключены к одним входам сумматоров 12, 13, другие входа которых через вторые блок 10 моделирования волнового соцротивления и блок 11 задания граничных условий на конце соединены с сумматором 14. Выход сумматора 12 подключен ко входу третьего блока 10 моделирования волнового сопротивления. Выходы блоков 3 моде;шрования гармоник соединены со входами сумматоров 5, 14. Передаточные функции устройства относител но выходов Вых. 1 и Вых. 2 соответствуют решени преобразованньк по Лапласу телеграфных уравнений при нулевых шчальных условиях и гранияных , условиях вида U(o,p)f(p)-2cV(o,p), U(l,p)Zp V(l,p) и равны соответственно: U(x,p) Bch/3(g-x) f(p) chpocCE-x) 5h:po6(g-x) Вch-poce в.Ш A/B-4--bVf/3g ihpolE 1+A/BthP V(x,p) |cVr(g-x) Ир) i 4iK/3e (g-x) 5hpoc(E-)c) ckpo«:E ckpocP , A/B-Hk/2. ,. 0 - ТТЩТЙТП- Р где U(x,p), V(x,p) изображения Лапласа напряжения (давления) и тока (расхода) в электрической (пневматической) длинной линии; f (р) - изображение Лапласа внешнего воздействия;-() Z.gihp(xhZg7 t)-2igih/3(-x)-t-ZBJ . /S. -олновое сопро й«-Юор Уа„Qo + Cop t+bp тивление длинной линии; RO. GO, LO, GO - погонные параметры; а, b - козффициенты, обеспечиваняцие минимизацию амплитудных и фазовых погрешностей при аштроксимации ZQ-2 - внутреннее сопротивление источника (статическое или динамическое звено, в общем случае может быть нелинейным), подключенного к началу линии, соответствующее граничйому условию в начале линии Z - нагрузка (активная или комплексная, в общбм может быть нелинейной) на ковде линии, соответствующая граничному условию на конце линии х i a,ft - коэффициенты фазы и поглощения соответственно, характеризующие коэффициент распространения 7 /3+рО ; для длинных электрических линий принимается 1с7 QO Гь jf-p...pfoCo, а для вентиляционных воздуховодов X-jSfTJct- /T С ч-n/ilg Г. Г T,(). Кроме того, в выражениях (1), (2) ehpo.(-x)ig,. . chpocE otEn.i « : А„(х) ckpo(e-x) )о wt 1р ,Ъ„(х). 7 r «л„ 2 w p . ™,д„М.(-и«Л,ф-|), ,co.(«a),
К выходу первого сумматора 2 подключены п блоков моделирования гармоник 3 с передаточной функадей р а , каждый из которых 5 реализуется, например, из усилителя с дифферен- цируняцей RC-цепочкой на входе и параллельно соединенных двух Т-образных RC-цепочек в обратной связи. Сумма сигналов с выходов этих блоков, )гмноженная на постоянный коэффициент Н , b операторной плоскости соответствует передаточной функции (5), которую получаем по каналу: выход первого сумматора 2 - блоки 3 моделирования гармоник - выход третьего сумматора 5. is
Сигналы с выходов п блоков 3 моделирования гармоник после умножения на постоянные для фиксированного значения пространственной координаты X коэффициенты AI (х), Aj (х)... А(зс), Bj (х), Ва (х), ... В„(х) суммируются на втором 20 4 и седьмом 14 сулшаторах соответственно. Вследствие этого по каналу: выход первого сумматора 2 - блоки 3 моделирования гармоник - выход седьмого,сумматора 14 реализуется временшя функция, которш в (этераторной плоскости соответству- 25 ет передаточная функция (3).
Сигнал с выхода второго сумматора 4 дифференцируется с помощью дифференцирующего звена 8, вьшолненного, например, на усилителе с дифференцирующей RC-цепочкой на входе, и далее по- зо дается на один из входов четвертого сумматора 9, на другой вход которого с тем же знаком подается сигнал с выхода первого сумматора 2 посредством инвертора 7. В результате по каналу: выход первого сумматора 2 - выход четвертого суммато- 35 ра 9 реализуется временная функция, которой в операторной плоскости соответствует передаточная функция (4).
Описанное устройство позволяет моделировать широкий класс систем, содержащих волновые эвень при любых значениях пространственной координаты.
Устройство для моделирования линий с распределенными параметрами, содержащее блок задания граничных условий, выход которого подключен к первому входу первого сумматора, выход которого через блоки моделирювания гармоник соединен со входами второго сумматора, отличающееся тем, что, с целью расширения функциональных возможностей устройства, в него введены инвертор, дифференцирующее звено, блоки моделирования волнового сопротивления, блоки задания граничных условнй на конце, дополнительные сумматоры и блок коррекции, вход которого соединен с выходом третьего сумматора, а выход - со входом первого сумматора, выход которого через инвертор подклю%н к первому входу четвертого сумматора, второй вход которого через дифферешшрующее звено соединен с выходом BTqporo сумматора, выход четвертого сумматора через первые блоки модалир жания волнового с Я1ротнвления к задания граничных условий на конце nojopenioHeHbi к одним входам пятого и шестого сумматоров,:другие входы которых через вторые блоки моделирования волнового сопротивления и задания гртнич ных условий на конце соединены с выходом седьмого сумматора, выход пятого сумиАтора подключен ко входу третьего блсжа моделирования волнового сопротивления, выходы блоков моделировашш гармоник соединены со входами третьего и седьмого сумматоров.
Источники информации, принятые во внимание при экспертизе:
1.Авторское свидетельство. СССР № 452014, кл. G 06 G 7/62, 1975.
2.Авторское свидетельство СССР N 435537, кл. G 06 G 7/50, 1974.
.
«Ni

| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ ЛИНИЙ С РАСПРЕДЕЛЕННЫМИ ПАРАМЕТРАМИ | 1971 |
|
SU435537A1 |
| УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ ТРЕХФАЗНОЙ ЛИНИИ ЭЛЕКТРОПЕРЕДАЧИ С РАСПРЕДЕЛЕННЫМИ ПАРАМЕТРАМИ | 2011 |
|
RU2469394C1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ | 2013 |
|
RU2541848C1 |
| УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ ВОЛНОВЫХПРОЦЕССОВ В ДЛИННЫХ линиях | 1972 |
|
SU423140A1 |
| Устройство для моделированияАВТОНОМНыХ иНВЕРТОРОВ TOKA | 1979 |
|
SU849247A1 |
| Устройство для моделирования длинной линии | 1986 |
|
SU1456975A1 |
| Самонастраивающаяся система комбинированного регулирования | 1986 |
|
SU1339494A1 |
| Электропривод | 1986 |
|
SU1372580A1 |
| Пропорционально-интегрально-дифференциалный регулятор | 1986 |
|
SU1388824A2 |
| Модель мышцы | 1983 |
|
SU1164746A1 |
5
55
5
