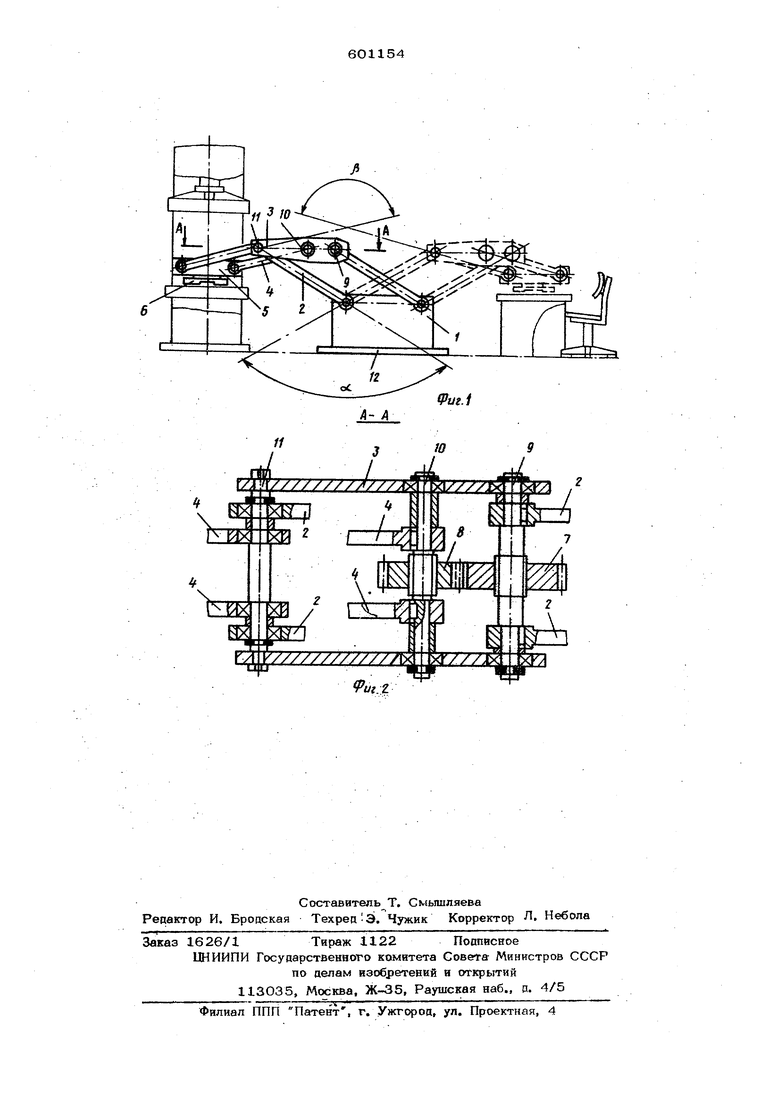
л Стойка 1 манипулятора закреплена парал лепьйо основанию 12, стойка второго мехаййзма совмацена с ведомым звеном 3 первого механизма, а схват 6 смонтирован иа ведомом звене 5 второго механизма, расположенном под ведомым звеном 3 первого механизма, при этом ведущие звенья 2 н 4 этих механизмов связаны между собой эуб- чатой передачей, состоящей из колес 7 н 8 Длины ведущих звеньев 2 и 4 находятся в соотношения 1-сов i.-co&где d - длина ведущего звена 2 первог механизма; b - длина ведущего звена 4 вт рого механизма; cs- -- наибольший угол колебайия первого механизма; /Ъ -. наибопыпий угол колебания второго механизма передачи, состоящей из колес 7 и 8, а передаточное число зубчатой передачи выполнено равным .отношению угла колебания второго механизма к углу колебания первого механизма. Механизм, привода, расположенный на стойке 1, сообщает колебательное двкже ние ведущему звену 2 первого механизмао Зубчатое колесо 7 неподвижно закреплено ка оси 9, установленной с возможностью поворота в стойке второго механизма, . являющейся ведомым звеном 3 первого механизма и жестко связанной с ведущим звеном 2 первого механизма Зубчатое колесо 8 неподвижно закреплено на оси 10 совмещенной с ведзтдим звеном 4 второго механизма, расположенной параллельно осн 9 с возможностью поворота в стойке 3. На оси 11 шарнирно закреплены ведущие звейья 2 и 4 первого и второго механизмов параллелограмма, не передающие крутящих моментов. Для обеспечения движения схвата 6 по траегегории, близкой к прямолинейной, пере даточное число колес 7 и 8 зубчатой пере дачи равно соотнощению угла уЗ колебани второго механизма к углу оо колебания первого механизма, При этом длина а ведущего звена 2 первого механизма и длина b ведущего звена 4 второго механизма нахоця1т;я а соотношении 1-соь 1-С06 Манипулятор работает следующим образом,. Вецушее звено 2 первого механизма параллелограмма получает колебательное движение от механизма привода, смонтированного на стойке 1, Прп движении ведущего звена 2 ось 9 и зубчатое колесо 7, с которыми жестко связано это зве-но, поворачивается относительно стойки 3. Это приводит в движение зубчатое колесо 8, находящееся в зацеплении с зубчатым колесом 7, и жестко соединенные с ним ось 10 и ведущее звено 4 второго механизма, которое в, свою очередь приводит в движение ведомое звено 5 этого механизма, несущего сх)зат 6. Последний перемещается в зону обработки по траектории, близкой к прямолйнейнойе По окончании цикла обработки подается команда на переключение направления вращения механизма привода. Схват 6 возвращается в исходное положение. Формула изобретения 1. Манипулятор, содержащий схват, соединенный с основанием механизмами параллелограмма, отличающийся тем, что, с целью упрощения его конструкции, стойка одного из механизмов закреплена параллельно основанию, стойка второго механизма совмещена с ведомым звеном первого Механизма, а схват смонтирован на ведомом звене второго механизма, расположенном под ведомым звеном первого ме- ханйзма, при этом ведущие звенья этих механизмов связаны между собой зубчатой передачей. 2. Манипулятор По п, т л и ч а юш и и с я тем, что цлины ведущих звеньев находятся в соотнощении . а J-cOb b i-co& рце а - длина звена первого механизма; Ь цлина звена второго механизма; Х нйибольщий колебания первого механизма; ft - наиболыиий угол колебания второго к:ехйнизма, а передаточное число зубчатой передачи выполнено равным отношению угла колебания второго механизма к углу колебания первого механизма. Источники информации, принятые во внимание при экспертизе; 1. Патент США № 3255893, кл. 214-1, 1966,
(РигЛ
9щ.г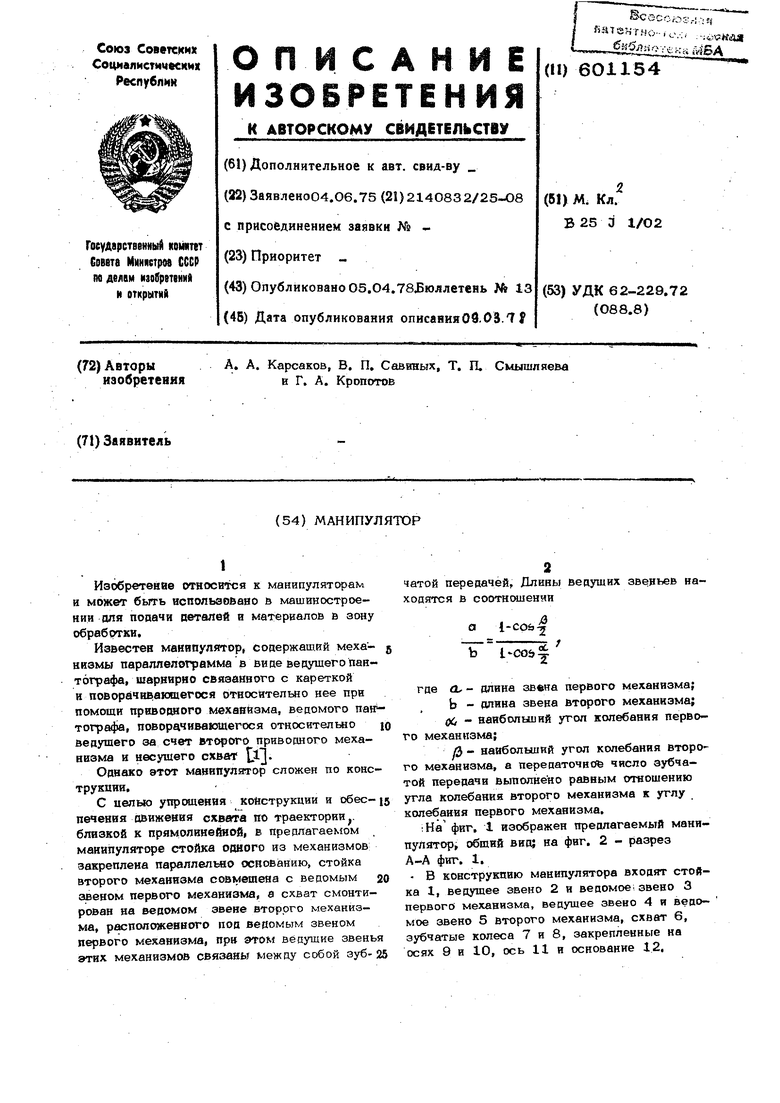
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1980 |
|
SU919864A2 |
| МАНИПУЛЯТОР ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2008 |
|
RU2390406C1 |
| Манипулятор | 1986 |
|
SU1364467A1 |
| МАНИПУЛЯТОР ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2007 |
|
RU2344031C2 |
| Манипулятор | 1984 |
|
SU1194673A1 |
| Манипулятор для плоских стеклоизделий | 1987 |
|
SU1549743A1 |
| ПРИВОД БЛОКА КОПИРОВ К ШВЕЙНОЙ МАШИНЕ ЗИГЗАГ | 2002 |
|
RU2215837C1 |
| МАНИПУЛЯТОР ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2007 |
|
RU2333829C1 |
| МАНИПУЛЯТОР ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2012 |
|
RU2521933C1 |
| МАНИПУЛЯТОР ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2007 |
|
RU2346804C2 |