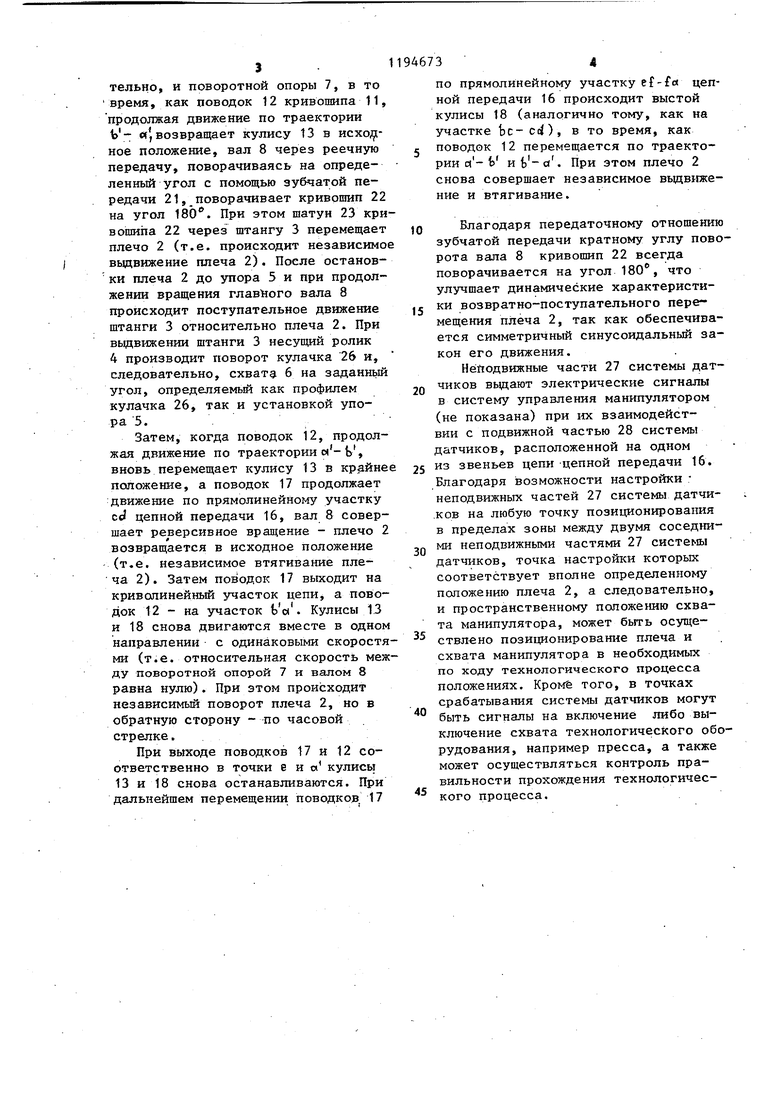
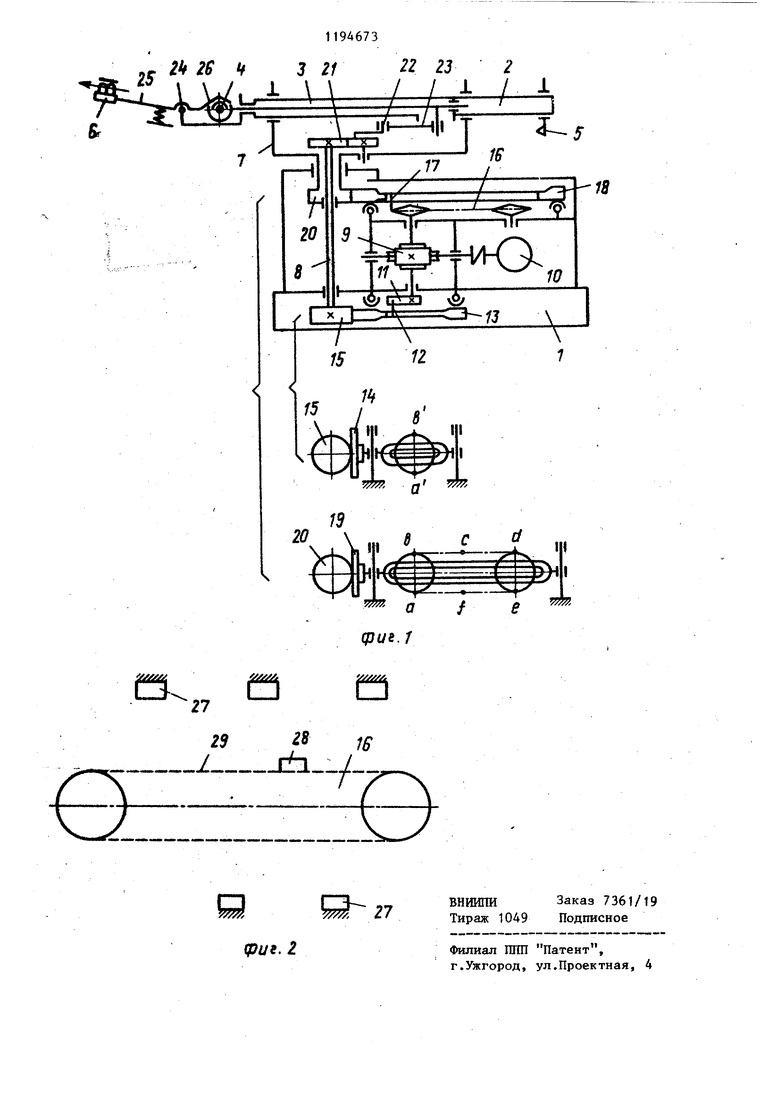
1 Изобретение относится к технолог ческому оборудованию для перемещения изделий из одной точки в другую и может быть использовано в майиностроении и других областях техники. Цель изобретения - повьппение про изводительности за счет улучшения динамических характеристик и расширения зоны обслуживания. На фиг. 1 изображена кинематическая схема манипулятораJ на фиг. 2-- схема взаимного расположения системы датчиков и цепной передачи . Манипулятор содержит основание 1 на котором смонтировано плечо 2, в котором установлена с возможностью возвратно-поступательного перемещеН1-1Я штанга 3 с роликом 4 на ее конце, при этом на конце плеча 2 установлен упор 5, схват 6 с механизмом его перемещения, механизм перемещения тплеча, включакяций кинематически связанную поворотную опору 7, вал 8, червячную передачу 9 с двигателе 10. Механизм 2 выдвия ения плеча состоит из кривошипно-кулисного механизма, имеющего кривошип. 11, вьшолнеиньн с поводком 12, установленный на одном конце выходного вала червячной передачи 9 и связанньм с кулисой 13, а также зубчато-реечной передачи, рейка 14 которой связана с кулисой 13, а зубчатое колесо 15 закреплено на одном конце вала 8 Механизм поворота плеча состоит из цепной передачи 16, ведущая звез дочка которой жестко связана с другим концом выходного вала червячной передачи 9, и имеет поводок 17, установленньй с возможностью взаимо действия с кулисой 18, и зубчатореечной передачи, рейка 19 которой связана с кулисой 18, а ось зубчато го колеса 20 закреплена на поворотной опоре 7. На другом конце вала 8 установлен зубчатая передача 21, ведущее колес которой жестко закреплено на конце вала 8, а ведомое колесо этой передачи посредством кривошипно-шатунного механизма связано со штангой 3 На ведомом колесе зубчаТой передачи 21 закреплен кривошип 22 кривошипно шатунного механизма, соединенный через шатун 23 со штангой 3 плеча 2 При этом ось ведомой шестерни зубчатой передачи 21 закреплена на поворотной опоре 7, причем передаточ732ное отношение зубчатой передачи 21 находится в зависимости от угла поворота вала 8 и определяется следующим вьфажением где d угол поворота вала 8 в градусах. Длина прямолинейного участка цепи цепной передачи 16 равна длине окружности, описываемой кривошипом 11, а длина всей цепи - в три раза больше ее.. Механизм перемещения схвата 6 выполнен в виде смонтированного на прикрепленной к плечу 2 опоре 24 двуплечего подпружиненного рычага 25,на одном конце которого закреплен схват 6, а на другом - кулачок 26,взаимодействующий с роликом 4 штанги 3, Система датчиков включает неподвижные части 27, закрепленные последовательно на основании 1, с возможностью настройки на любую точку позиционирования в пределах заранее выбранных зон положения плеча 2 манипулятора, и подвижную часть 28, установленную на одном из звеньев цепи 29 цепной передачи 16 и взаимодействующую с последовательно расположёнными неподвижными частями 27. Манипулятор работает следующим образом. От двигателя 10 через червячную передачу 9 вращение посредством выходного вала одновременно передается на кривопшп 11 и ведущую звездочку цепной передачи .16. Поводок 17 двигается из точки а по траектории а-Ь, а поводок 12 - из точки апо траектории ч-Ь при этом кулисы соответственно 18 и 13 с рейками 19 и 14 будут перемещаться в одном направлении -и, благодаря одинаковым передаточным отношениям реечных передач, с одинаковыми скоростями по синусоидальному закону (т.е. относительная скорость между поворотной опорой 7 и валом 8 равна нулю). При этом происходит независимый поворот плеча 2 против часовой стрелки. При выходе поводков М и 12 соответственно в точки t и tкулисы 18 и 13 останавливаются. При дальнейшем перемещении поводка 17 по прямолинейному участку в цепкой передаче 16 происходит выстой кулисы 18, а следова3 . тельно, и поворотной опоры 7, в то время, как поводок 12 кривошипа 11, продолжая движение по траектории Ъ- «, возвращает кулису 13 в исходное положение, вал 8 через реечную передачу, поворачиваясь на определенный угол с помощью зубчатой передачи 21, поворачивает кривошип 22 на угол 180. При этом шатун 23 кри вошипа 22 через штангу 3 перемещает плечо 2 (т.е. происходит независимо вьщвижение плеча 2). После остановки плеча 2 до упора 5 и при продолжении вращения вала 8 происходит поступательное движеьше штанги 3 относительно плеча 2. При выдвижении штанги 3 несущий ролик 4 производит поворот кулачка 26 и, следовательно, схвата 6 на заданный угол, определяемый как профилем кулачка 26, так и установкой упора 5. Затем, когда поводок 12, продолжая движение по траектории «-fc, вновь перемещает кулису 13 в крайне положение, а поводок 17 продолжает движение по прямолинейног гу участку cJ цепной передачи 16, вал 8 совершает реверсивное вращение - плечо 2 возвращается в исходное положение (т.е. независимое втягивание плеча 2). Затем поводок 17 выходит на криволинейный участок цепи, а поводок 12 - на участок Ьа. Кулисы 1.3 и 18 снова двигаются вместе в одном направлении с одинаковыми скоростя ми (т.е. относительная скорость меж ду поворотной опорой 7 и валом 8 равна нулю). При этом происходит независимый поворот плеча 2, но в обратную сторону - по часовой стрелке. При выходе поводков 17 и 12 соответственно в точки е и а кулисы 13 и 18 снова останавливаются. При дальнейшем перемещении поводков. 17 34 по прямолинейному участку ef-fa цепной передачи 16 происходит выстой кулисы 18 (аналогично тому, как на участке Ьс-С(), в то время, как поводок 12 перемещается по траектории и- Ь иЬ-с(. При этом плечо 2 снова совершает независимое вьщвргжение и втягивание. Благодаря передаточному отношению зубчатой передачи кратному углу поворота вала 8 кривошип 22 всегда поворачивается на угол 180, что улучшает динамические характеристики возвратно-поступательного пере мещения плеча 2, так как обеспечивается симметричный синусоидальный закон его движения. Нёйодвижные части 27 системы датчиков выдают электрические сигналы в систему управления манипулятором (не показана) при их взаимодействии с подвижной частью 28 системы датчиков, расположенной на одном из звеньев цепи цепной передачи 16. Благодаря возможности настройки неподвижных частей 27 системы датчи.ков на любую точку позиционирования в пределах зоны между двумя соседними неподвижными частями 27 системы датчиков, точка настройки которых соответствует вполне определенному положению плеча 2, а следовательно, и пространственному папожет1ю схвата манипулятора, может быть осуществлено позиционирование плеча и охвата манипулятора в необходимых по ходу технологического процесса положениях. Кроме того, в точках срабатывания системы датчиков могут быть сигналы на включение либо выключение схвата технологического оборудования, например пресса, а также может осуществляться контроль правильности прохождения технологического процесса.
2ff г tf 3 2122 23 2
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1984 |
|
SU1252161A1 |
| Манипулятор | 1988 |
|
SU1521577A1 |
| Манипулятор | 1986 |
|
SU1328187A1 |
| ФРЕЗЕРНЫЙ СТАНОК | 1994 |
|
RU2082602C1 |
| Станок для обработки кольцевого желоба переменного профиля | 1988 |
|
SU1645108A1 |
| Устройство для обработки кольцевого желоба переменного профиля | 1973 |
|
SU515628A1 |
| Манипулятор для передачи изделий | 2023 |
|
RU2822908C1 |
| Промышленный робот | 1983 |
|
SU1129069A1 |
| Манипулятор | 1985 |
|
SU1331638A1 |
| РЫЧАЖНЫЙ ВАРИАТОР | 2011 |
|
RU2467227C1 |
1. МАНИПУЛЯТОР, содержапщй основание, на котором смонтировано плечо, несущее упор, дри этом в плече установлена с возможностью возвратно-поступательного перемещения штанга с роликом на ее конце, механизм перемещения плеча, имеющий вал, двигатель, червячную передачу, имеющую выходной вал и поворотную опору, охват с механизмом его перемещения, выполненным в виде смонтированного на плече подпружиненного двуплечего рычага, на одном конце которого закреплен схват, а на другом - кулачок, взаимодействующий с роликом штанги, отличающийся тем, что, с целью повьшения производительности путем улучшения динамических характеристик и расширения зоны обслуживания, он снабжен кулисой, кривошипно-кулисным механизмом, кривопшпно-шатунным механизмом, двумя зубчато-реечными передачами, зубчатой передачей и цепной передачей, ведзпцая звездочка которой жестко связана с одним концом .выходного вала червячной передачи и имеет поводок, установленный с возможностью взаимодействия с кулисой, а последняя посредством одной зубчато-реечной передачи связана с поворотной опорой, при этом другой конец выходного вала червячной передачи посредством кривошипно-кулисного механизма и другой зубчато-реечной передачи связан с валом механизма перемещения плеча, другой конец которого с помощью зубчатой передачи и кривошипно-щатунного механизма связан со штангой, причем длина прямолинейного участка цепи равна длине окруж§ ности, описываемой кривошипом первого кривошипно-кулисного механизма, (Л а длина всей цепи в три раза больше длины окружности. 2. Манипулятор по п.1, о т л и чающийс-я тем, что передаточное отношение зубчатой передачи определяется выражением 180 Г) 1 7 1 4 О5 где oi - угол поворота вала механизма , перемещения плеча, град. , СО 3. Манипулятор по п.1, о т л и ч а ю щ и и с я тем, что он снабжен .системой датчиков, включающих неподвижные и подвижную части, при этом неподвижные части установлены на основании, а подвижная - на одном из звеньев цепи цепной передачи.
| Манипулятор | 1977 |
|
SU655522A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| : | |||
