(54) МАНИПУЛЯТОР
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1975 |
|
SU601154A1 |
| Захватная головка манипулятора | 1988 |
|
SU1572806A1 |
| Манипулятор | 1986 |
|
SU1364467A1 |
| МАНИПУЛЯТОР ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2008 |
|
RU2390406C1 |
| Манипулятор | 1980 |
|
SU1050863A1 |
| Манипулятор | 1983 |
|
SU1199610A1 |
| Манипулятор | 1990 |
|
SU1759619A1 |
| Манипулятор | 1984 |
|
SU1194673A1 |
| ПРИВОД БЛОКА КОПИРОВ К ШВЕЙНОЙ МАШИНЕ ЗИГЗАГ | 2002 |
|
RU2215837C1 |
| Манипулятор А.И. полетучего | 1985 |
|
SU1247262A1 |
1
Изобретение относится к машиностроению, а именно к манипуляторам-для подачи деталей и материалов в зону обработки. По основному авт. св. № 601154 известен манипулятор, содержащий схват, соединенный с основанием механизмами параллелограмма, стойка одного из механизмов закрейлена параллельно основанию, стойка второго механизма совмешена с ведомым звеном первого механизма, а схват смонтирован на ведомом звене второго механизма, при этом ведущие звенья этих механизмов связаны между собой зубчатой передачей. Длины-Недущих звеньев находятся в соотношении-d. 1 - cos ;S/2 I - cos л/2
где а - длина звена первого механизма; Ь -длина звена второго механизма; наибольший угол колебания первого
механизма;
-наибольший угол колебания второго механизма, а передаточное число зубчатой передачи выполнено равным отношению угла колебания второго, механизма к углу колебания первого механизма 1.
Цель изобретения - расширение зоны обслуживания.
Поставленная цель достигается тем, что манипулятор снабжен дополнительными осями, соединяющими ведущие звенья со стойкой и с ведомым звеном, причем оси размещены перпендикулярно осям зубчатой передачи.
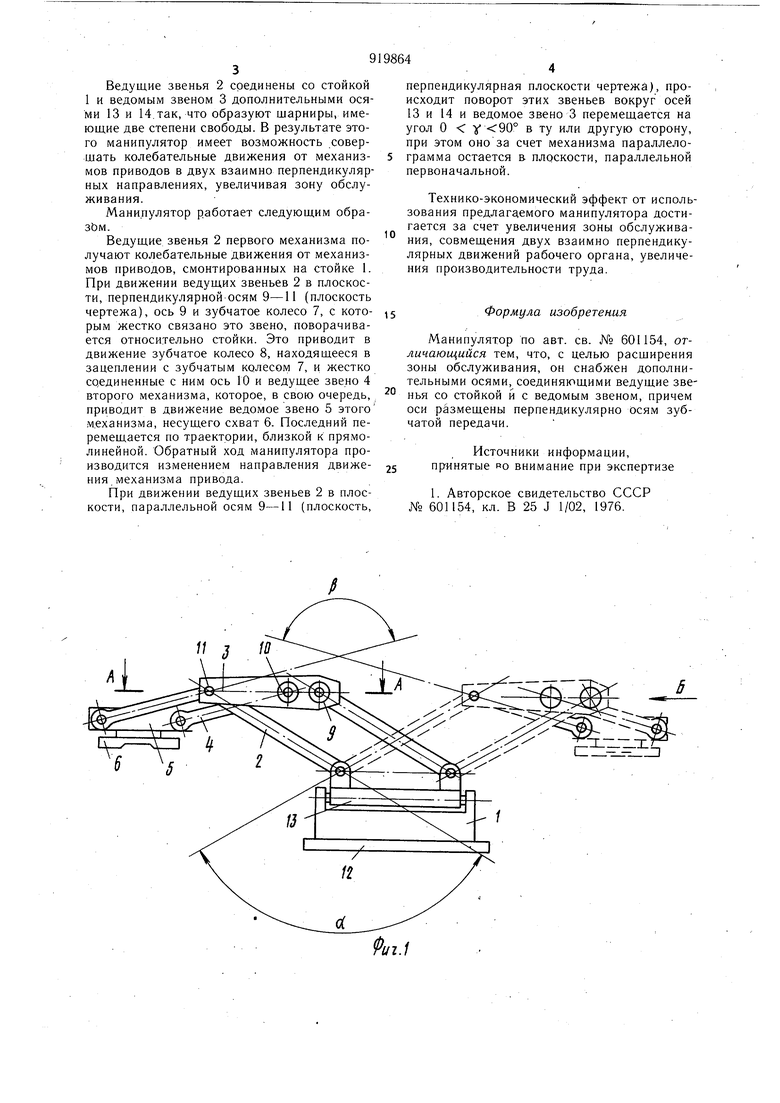
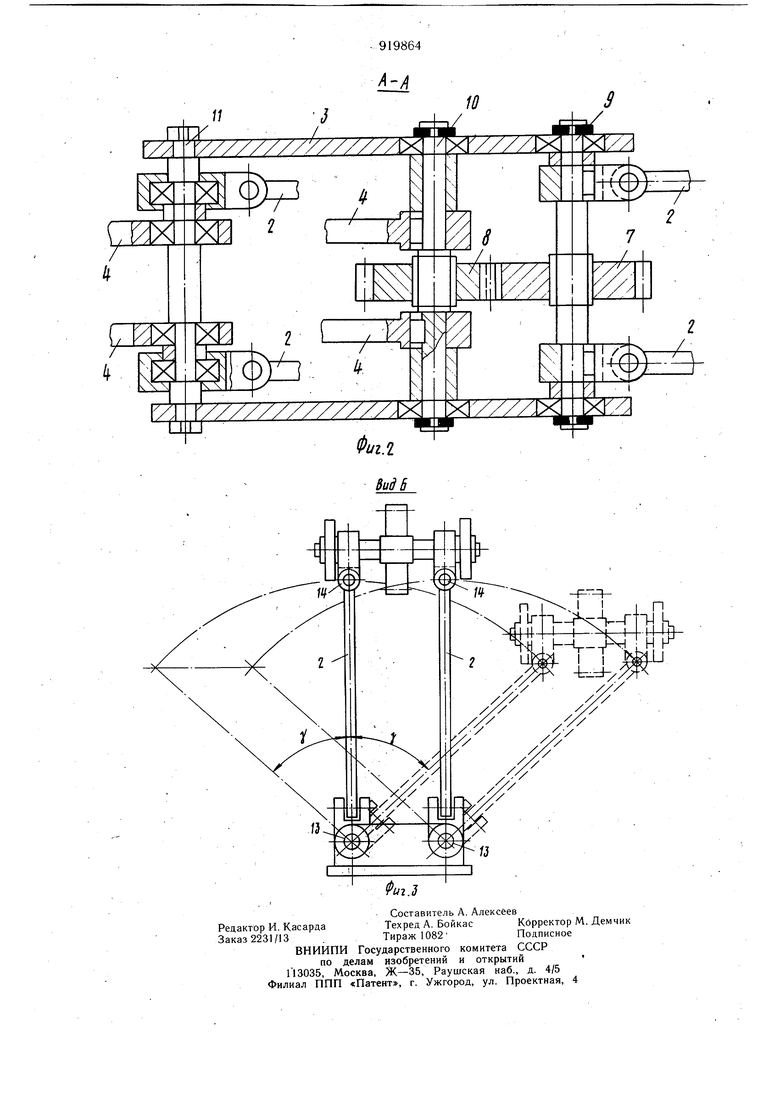
На фиг. 1 изображен манипулятор, общий вид; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - вид Б на фиг. 1.
10
В конструкцию манипулятора входят стойка 1, ведущее звено 2 и ведомое звено 3 первого механизма, ведущее звено 4 и ведомое звено 5 второго механизма, схват 6, зубчатые колеса 7 и 8, закрепленные на осях 9 15 и 10, ось 11 и основание 12.
Стойка 1 манипулятора закреплена параллельно основанию 12, стойка второгб механизма совмещена с ведомым звеном 3 первого механизма, а схват 6 смонтирован на ведомом звене 5 второго механизма, распо20ложенном под ведомым звеном 3 первого механизма, при этом ведущие звенья 2 и 4 этих механизмов связаны между собой зубчатой передачей, состоящей из колес 7 и 8. Ведущие звенья 2 соединены со стойкой 1 и ведомым звеном 3 дополнительными осями 13 и 14.так, что образуют шарниры, имеющие две степени свободы. В результате этого манипулятор имеет возможность совершать колебательные движения от механизмов приводов в двух взаимно перпендикулярных направлениях, увеличивая зону обслуживания. Манипулятор работает следующим образЬм. Ведущие звенья 2 первого механизма получают колебательные движения от механизмов приводов, смонтированных на стойке 1. При движении ведущих звеньев 2 в плоскости, перпендикулярной-осям 9-11 (плоскость чертежа), ось 9 и зубчатое колесо 7, с которым жестко связано это звено, поворачивается относительно стойки. Это приводит в движение зубчатое колесо 8, находящееся в зацеплении с зубчатым колесом 7, и жестко соединенные с ним ось ГО и ведущее звено 4 второго механизма, которое, в свою очередь, приводит в движение ведомое звено 5 sjoro м.еханизма, несущего схват 6. Последний перемещается по траектории, близкой к прямолинейной. Обратный ход манипулятора производится изменением направления движения механизма привода. При движении ведущих звеньев 2 в плоскости, параллельной осям 9-11 (плоскость. ерпендикулярная плоскости чертежа), npoj исходит поворот этих звеньев вокруг осей 13 и 14 и ведомое звено 3 перемещается на угол О у 90° в ту или другую сторону, при этом оно за счет механизма пapaллeлoJ грамма остается в плоскости, параллельной первоначальной. Технико-экономический эффект от использования предлагаемого манипулятора достигается за счет увеличения зоны обслуживания, совмещения двух взаимно перпендикулярных движений рабочего органа, увеличения производительности труда. Формула изобретения Манипулятор по авт. св. № 601154, отличающийся тем, что, с целью расщирения зоны обслуживания, он снабжен дополнительными осями, соединяющими ведущие звенья со стойкой и с ведомым звеном, причем оси размещены перпендикулярно осям зубчатой передачи. Источники информации, принятые во внимание при экспертизе 1 Авторское свидетельство СССР № 601154, кл. В 25 J 1/02, 1976.
