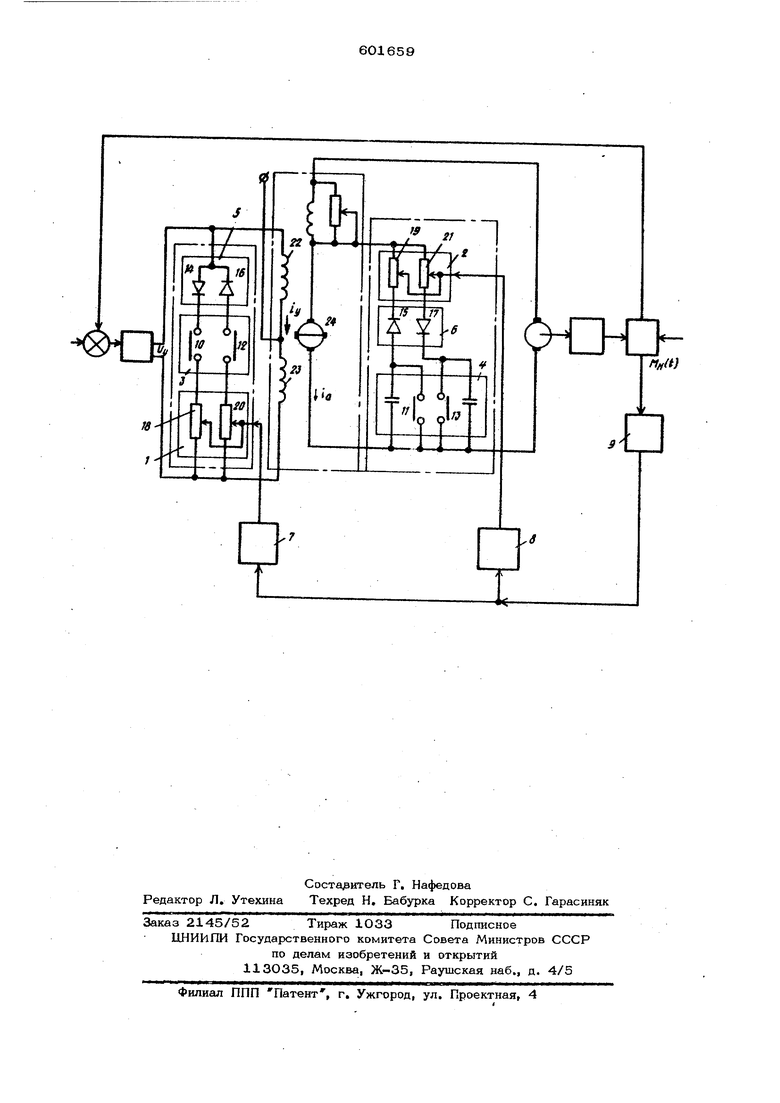
II второй 2 регуляторы тока, первый 3 и второй 4 блоки концевьпс выключателей, первый 5 н второй 6 блоки выпрямителей, первый 7 и второй8 блоки управления, датчик момента 9, замыкающие контакты 10-13 концевых выключателей, диоды 14-17, резисторы 18-21, обмотки управления 22, 23, цепь якоря 24, Uy -управляющее напряжение системы, i -ток управления электромашинного усилителя,
i -ток в цепи якоря электромашинного усилителя. ДЛ ц Ct) -активный момент на выходном валу следующей системы.
Устройство работает следующим образом. J,
При выходе объекта регулирования на предельный угол выходной вал системы нажимает на концевые выключатели, и замыкаются замыкающие контакты, например 1О 11, этих выключателей в блоках 3, 4. При этом цепь, состоящая из последовательно соединенных диода 14, контактов 10 И резистора 18, и цепь, состоящая из последовательно соединенных резистора 19, диода 15 и контактов 11, шунтируют обмотку 22 и цепь якоря 24 полностью, так как сопротивления резисторов 18 и 19 в этом случае равна нулю, или частично, т.е. обеспечивая такие токи 1 j в обмотке 22 и IQ) в цепи якорк 24, которые обеспечивают удерж ниё активного момента М (t) на валу следящей системы. Значения момента ) на ... валу следящей системы измеряются
датчиком момента 9, по сигналам с которог
блоки управления 7 и 8 изменяют величины сопротивлений резисторов в регуляторах тока 1 и 2.
Введение датчика момента в устройство позволит повь1сить надежность торможения почти в два раза.
Формула изобретения
Устройство для торможения электромашинных следящих систем, содержащее последовательно соединенные первые блок вьь прямителей, блок концевых выключателей и регулятор тока, последовательно соединённы вторые блок концевых выключателей, блок вьтрямителей и регулятор тока, управляющи входы регуляторов тока соединены с соответствующими входами блоков управления, отличающееся тем, что, с целью повышения надежности . устройства, в нем установлен сдатчик момента, выход которого соединен со входами блоков управ ления.
Источники информации, принятые во внимание при экспертизе:
1.Крайцберг М. И. и др. Импульсные методы регулирования цепей постоянного тока с помощью тиристоров. М., Энергия, 1969, с. 48-53.
2.Новоселов Б. В. Схема торможения электромеханических следящих приводов на предельных рабочих углах. Ж., Электротехника, 1967, № 2.
xSO
| название | год | авторы | номер документа |
|---|---|---|---|
| СЛЕДЯЩАЯ СИСТЕМА НАВЕДЕНИЯ | 2006 |
|
RU2347172C2 |
| Следящая система с ограниченным углом поворота выходного вала | 1986 |
|
SU1339488A1 |
| Следящая система | 1975 |
|
SU612203A1 |
| Двухканальный следящий привод | 1975 |
|
SU661498A1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ СЦЕПЛЕНИЕМ ТРАНСПОРТНОГО СРЕДСТВА | 1992 |
|
RU2044663C1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ СЦЕПЛЕНИЕМ ТРАНСПОРТНОГО СРЕДСТВА | 2003 |
|
RU2321502C2 |
| Силовой следящий электропривод для управления угловым положением объекта | 1962 |
|
SU152011A1 |
| ТРЕНАЖЕР ПО УПРАВЛЕНИЮ СУДОВОЙ ЭЛЕКТРОСТАНЦИЕЙ И ГРЕБНОЙ ЭЛЕКТРИЧЕСКОЙ УСТАНОВКОЙ | 1991 |
|
RU2006957C1 |
| Электропривод постоянного тока | 1984 |
|
SU1239820A1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ СЦЕПЛЕНИЕМ ТРАНСПОРТНОГО СРЕДСТВА | 1993 |
|
RU2090384C1 |