- , , 1 Изобретение относится кр6.г1асти систем автоматического управления и регулирования и может быть использовано для построения двухканальных следящих Ьри9одов с сталозым опорным каналом, имешщих ограниченный угол вращения нагрузки. Известны одноканальные следящие приводы, имеющие в своем составе устройства торможения на предельных рабочих углах, обеспечивающие тормож ние нагрузки на минимально воэможHOfM угле при подходе ее к концевому выключателю,установленному на опреде ленном угле от жесткого упора Из известных устройств наиболее близким по технической сущньсти является двухканальный следящий привод содержащий .пёрёый источник опорного напряженияiT последовательно соединен ные пер&ый сумматор, первый коммутатор, основной канал управления, выход которого соединей со входом первого датчика скорости и первым входом дифференциала, выход которого соединен со входом устройства торможения и входным валрм редуктора, выходной вал которого соединен со входом нагрузки, первый выход которой соединен со входами первого и второго конц(ввых выключателей, а Второй выход соединен с одним из входов первого сумматгора и входом второго датчика :Скор6сти, выход которого соединен со вторым В1ХОДОМ основного кана;ла управления, третий вход которого соединен с выхо1дом первого датчика скорости, ai чет вертый вход - с первым выходом второго источника опорного напряжения, второй сумматор, первый вход которого соединен с выходом первого датчика скорости, а второй вход соединен с выходом третьего датчика скорости и первым входом опорного канала управления, выход которого соединен со вторым входом дифференциала и входом третьего датчика скорости, первые выходы первого и второго концевых выключателей соединены соответственно со вторым и третьим входами первого Тсбммутатора 3. Недостатком известного привода является его низкое быстродействие изза недостаточно эффективного торможения на предельных рабочих углах. Целью настоящего изобретения является повышение быстродействия привода. Поставленная цель достигается тем, что в приводе установлены второй и
ретий коммутаторы, первые входы коорых соединены с выходами второго умматора, выходы первого источника порного напряжения соединены соответтвенно со вторым и третьим .входами ретьего коммутатора, четвертый вход которого соединен со вторым .выходом 5 второго источника опорного напряжения, пятый и шестой входы соединены со вторыми выходами соответствующих концевых выключателей, а выход - со вторым входом опорного канала управ- Ю ения, второй вход третьего коммутатора соединен с выходом первого сумматора, третий и четвертый входы третьего коммутатора соединены с третьими выходами, соответствующих 15
Гбйцев ых Жыключатёлей, а выхУд рётьего коммутатора соединен со входом устройства торможения.
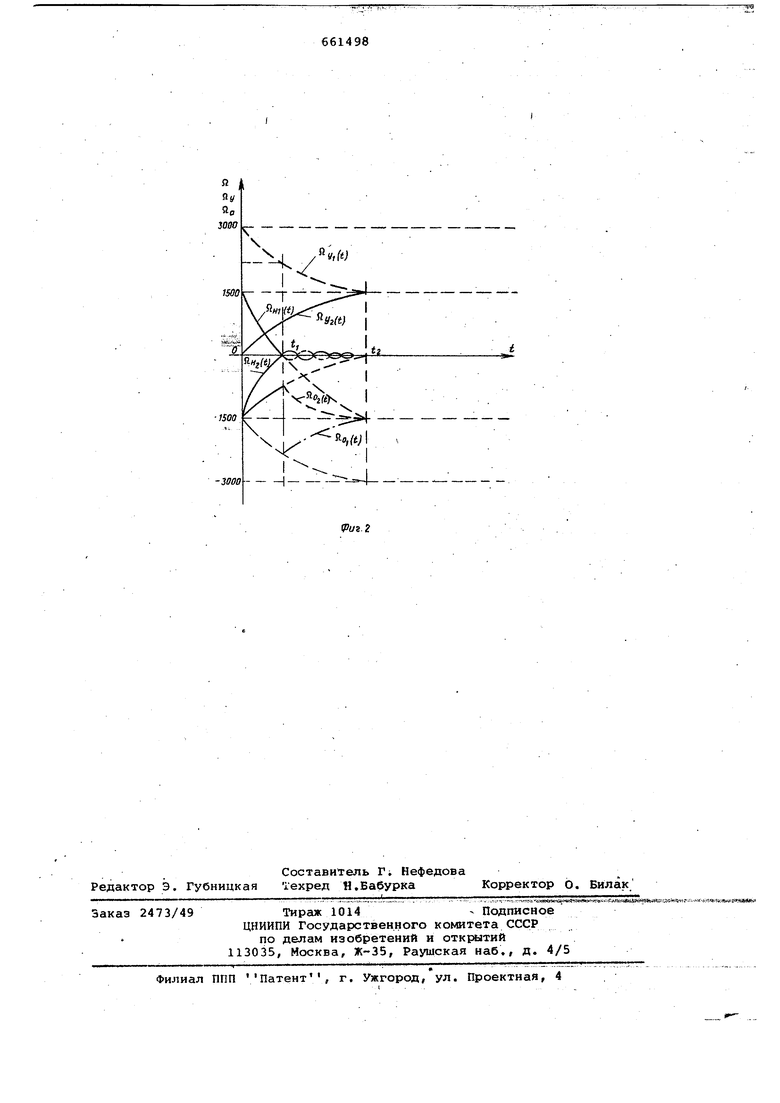
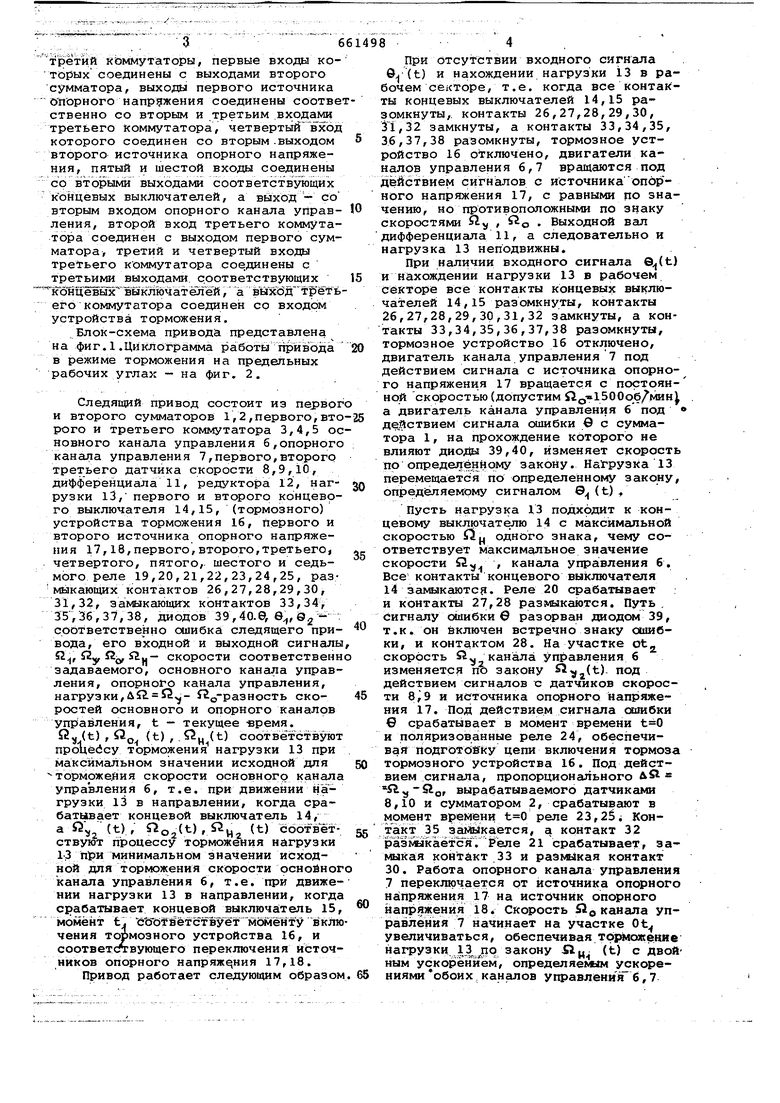
Блок-схема привода представлена на фиг.1.Циклограмма работы привода 20 в режиме торможения на предельных рабочих углах - на фиг. 2.
Следящий привод состоит из первого и второго сумматоров 1,2,первого,вто-25 рого и третьего коммутатора 3,4,5 основного канала управления 6,опорного канала управления 7,первого,второго третьего датчика скорости 8,9,10, дифференциала 11, редуктора 12, наг- JQ рузки 13, первого и второго концевого выключателя 14,15, (тормозного) устройства торможения 16, первого и второго источника опорного напряжения 17,18,первого,второго,третьего, « четвертого, пятого, шестого и седьмого реле 19,20,21,22,23,24,25, размыкающих контактов 26,27,28,29,30, 31,32, за1 икающнх контактов 33,34,
35,36,37,38, диодов 39,40. е, в;,, 02 соответственно ошибка следящего при- вода, его входной и выходной сигналы, Siy Sly Siu- скорости соответственно задаваемого, основного канала управления, опорного канала управления, нагрузки,йЯ. fijj-разность ско- 45 ростей основного и опорного каналов упрайления, t - текущее -время, й (t) , QO (t) , ц (t) соответствуют процессу торможения нагрузки 13 при максимальном значении исходной для 50 торможения скорости основного канала управления 6, т.е. при движении нагрузки 13 в направлении, когда срабатывает концевой выключатель 14, а й , (t) , а02(t) ,ц (t) сбответ- 55 ствуют процессу торможения нагрузки 13 минимальном значении исходной для торможения скорости рснойного канала управления 6, т.е. при движении нагрузки 13 в направлении, когда срабатывает концевой выключатель 15, ° момент tj. CtrofSetcTiByef моменту включения тормозного устройства 16, и соответствующего переключения источников опорного напряжения 17,18.
Привод работает следующим образом. 65
При отсутствии входного сигнала © (t) и нахождении нагрузки 13 в раочем секторе, т.е. когда все контакы концевых выключателей 14,15 раомкнуты, контакты 26,27,28,29,30, 1,32 замкнуты, а контакты 33,34,35, 36,37,38 разомкнуты, тормозное устойство 16 отключено, двигатели каалов управления 6,7 вращаются под ействием сигналов с источникаопорого напряжения 17, с равными по знаению, но противоположными по знаку коростями Slj, , Лд . Выходной вал ифференцисша 11, а следовательно и нагрузка 13 неподвижны.
При наличии входного сигнала ©(t) и нахождении нагрузки 13 в рабочем секторе все контакты коицевых выключателей 14,15 разомкнуты, контакты 26,27,28,29,30,31,32 замкнуты, а контакты 33,34,35,36,37,38 разомкнуты, тормозное устройство 16 отключено, двигатель канала управления 7 под действием сигнала с источника опорного напряжения 17 вращается с постоянной скоростью (допустим Йд-а1500об/мин а двигатель канала управления 6 под де йствием сигнала ошибки Q с сумматора 1, на прохождение которого ие влияют диоДы 39,40, изменяет скорость по определенному закоИу. Нагрузка 13 перемещается по определенному закону, определяемому сигналом ©(t),
Пусть нагрузка 13 подходит к концевому выклк)чателю 14 с максимальной скоростью ilj одного знака, чему соответствует максимальное зиачение скорости Q,( , канала управления 6, Все контакты концевого выключателя 14 Зс1мыкаютср. Реле 20 срабатывает и контакпл 27,28 размыкаются. Путь . сигналу ошибки© разорван даюдом 39, т.к. он включен встречно зиаку ошибки, и контактом 28. На участке ot скорость Sly канала управления 6 изменяется по закону Й,(ъ). под действием сигналов с датчиков скорости 8J9 и источника опорного напряжения 17. Под действием сигнала ошибки Q срабатывает в момент времени и поляризованные реле 24, обеспечивая подготОвКу цепи включения тормоза тормозного устройства 16. Под действием сигнала, пропорционального л51 « Лу-Яц, вырабатываемого датчиками 8,10 и сумматором 2, срабатывают в момент времени реле 23,2§; Контакт 35 закликается, а контакт 32 размыкается. Реле 21 срабатывает, замыкая контакт 33 и разкыкая контакт 30. Работа опорного канала управления 7 переключается от источника опорного напряжения 17 на источник опорного напряжения 18. Скорость 2о канала управления 7 начинает на участке Ot увеличиваться, обеспечивая тр1Я4ожение нагрузки закону (t) с двойным ускорением, определяемым у скорениями обоих каналов управлений б, 7 до момента i когда скоробти n., и Лд станут равными. В точке , включается тормозное устройство 16, т.к. разность ДЯ. й - 51 О, то следовательно отпускает реле 25 и ег контакт 32 замыкается, а работа опор HJoro канала управления 7 переключает ся с источника onopHQl-o Цапряжения 18 на источник опорного напряжения 17. Двигатель канала управления 7 с момента начинает тормозиться. Если обеспечить одинаковыми .с момента , т.е. на участке 1; -123аконы изменения «„ (t) и Л (t) , то уже, начиная с , скорость . Таким образом привод позволяет в несколько раз увеличить ускорение торможения; использовать включение тормозного устройства 16 без ударных мо ментов, а путь торможения свести до минимума. Пусть нагрузка 13 подходит к кониевому выключателю 15 с максимальной скоростью Siu другого знака, чему соответствует минимальное значение скорости SI,, канала управления 6. Все контакты концевого выключателя 15 замыкаются. Реле 19 срабатывает и контакты. 26,29 размыкаиотся. Путь сигналу ошибки в разорван диодом 40, т.к. он теперь включен встречно зна-г ку ои1ибки, и контактом 26. На участк Ot2 СКОРОСТЬ ft,, изменяется по зако ну ПОД действием сигнгшов с дат чиков скорости 8,9 и источника опорного сигнала 17. Под действием сигнала оцшбки 0 в момент времени срабатывает поляризованное реле 24, обес печивая подготовку цепи включения тормоза тормозного устройства Ifa, rfo цепь эта разорвана на участке ОЦ кон тактами 32, т.к. феле 25 под действи ем сигнала, пропорционального Д51 , сработало и разомкнуло их. В момент срабатЕлвает и поляризованное репе 23, замыкая контакт 36 и обеспечивая срабатывание реле 22, что обеспечивает переключение работы канала управления 7 с источника опорного на пряжения 17 на источник опорного напряжения 18. Скорость о-г уменьщается. Нагрузка 13 на участке Ot перемещается по закону Si (t) . В момент (7, AfiL 6,контакты J2 замыкаются, тормозное устройство 16 включается; контакты 36 размыкаются, реле 22 отпускает, контакты 31 размыкаются, а контакты 34 Зс1мыкаются, переводя кана управления--.7 с работы от источника опорного напряжения 18 на источник опорного напряжения 17. Скорость о на участке;t - t увеличивается. Обеспечив идентичность законов Яд (t) , Л,, (t) на участке t, можно, начиная с , обеспечить . Вывод 13 из зоны торможения (допустим у концевого выключателя 15) обеспечивается за счет того, что при изменении знака в диод 40
661498 пропуск ает сигнал 9 и канал управления 6 становится управляемым. При этом тормозное устройство 16 отключается, т.к. поляризованное реле 24, если и замкр|ет контакты, то только контакт 37, в цепи которого находится разомкнутый концевой выключатель Проанализировав работу предлагаемого привода, видим, что ускорение торможения его на предельных рабочих углах удваивается, и путь торможения сокращается вдвое. Предположим, .что торможение двигателей и нагрузки происходит по линейному закону, тогда путь торможения S выражаетсяS дляслучая известного привода при ускорении торМОЖеНИЯеГд так0) для случая (.-o предлагаемого привода 3 г-. следовательно Sg 0,5Sj. Включение тормозного устройства 16 исключает перемещение нагрузки 13 с ползучими скоростями . Реализация предлагаемого привода не требует сложного дополнительного оборудования и практически решается применением пяти реле и одного трансформатора, выполняющего роль источ«« опорного напряжения. Формула изобретения Двухканальный следящий привод, соДержащий первый источник опорного жащий ПС напряжения и последовательно соединапряжения и последовательно соеди-ненные первый сумматор, первый коммутатор, основной канал управления, выход которого соединен со входом первого датчика скорости и первым входом дифференциала, выход которого соединен со входом устройства тормОжёния и входным валом редуктора, выходной вал которого соединен со входом нагрузки, первый выход которой соединен со входами первого и второго концевых выключателей, а второй выход соединен с одним из входов первого сумматора и входом второго датчика скорости, выход которого соединён со вторым входом основного канала управления, третий вход которого соединен с выходом первого датчика скорости, а четвертый вход - с первым выходом второго источника опорного напряжения, второй сумматор, первый вход которого соединен с выходом первого датчика скорости, а второй вход соединен с выходом третьего датчика скорости и первым входом опорного канала управления, выход которого соединен со вторым входом дифференциала и входе третьего датчика скорости, первые выходы первого и второго концевых выключателей соединены соответственно со вторым и третьим входами первого коммутатора, отличающи и. с я тем, что, с целью повьше ния быстродействия привода, в нем установлены второй и третий коммутат6{ ь1, первые входы KOTOJXJX соединены 1е 1Ш 5ДаШ1 второго сумматора, выходы первого источника опорного напряже йГЯ ШёаЙйЩ :ГебьтвеТственн6 со и т рёгьим входами второго коммутатора, четвертый вход которого соёдййёй сО вторым выходом второго исч&чпкка «эпорнОго напряжения, пятый и шестой йхОда Соединены Со вторыми выходами соОтветсТВУЮ1ЦИХ концевых выключателей, а выход - со вторым t g fel5n( pro кШШл а ynjiSisA tm я, второй вхОд третьего коммутагд ра соединен с-выходом первого сумматора, третий и четвертый входы третьего коммугатора соединены с третьими выходами соответствующих концевых выключателей, а выход третьего коммутатора соединен со входом устройства торможения.
Источники информации, принятые во внимание при Э1(спертизе
1.Авторское свидетельство СССР О 252445, кл. 21 С 53/53, 1969.
2.Рабинович Л. В Проектирование следящих систем. М., Машиностроение , 1969 г., с. 472-475.
3.Новоселов Б. В. Схема торможанйя электромеханических следяишх приводов на предельных рабочих углах
Электричество
1967 г., 4.
n
Пу
По
3000
1500
Ж
1500
-3000
| название | год | авторы | номер документа |
|---|---|---|---|
| СЛЕДЯЩАЯ СИСТЕМА НАВЕДЕНИЯ | 2006 |
|
RU2347172C2 |
| Устройство для формирования управляющего воздействия следящего привода | 1973 |
|
SU516016A1 |
| Копировальное следящее устройство для управления станком | 1982 |
|
SU1104470A1 |
| Устройство для управления позиционным электроприводом | 1977 |
|
SU714352A1 |
| Следящая система с ограниченным углом поворота выходного вала | 1986 |
|
SU1339488A1 |
| Двухканальный следящий привод | 1975 |
|
SU549781A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ТОРМОЖЕНИЕМ КОЛЕС САМОЛЕТА | 1988 |
|
SU1603677A1 |
| Устройство для управления следящим приводом | 1973 |
|
SU648942A1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ СЦЕПЛЕНИЕМ ТРАНСПОРТНОГО СРЕДСТВА | 1992 |
|
RU2044663C1 |
| Следящая система | 1975 |
|
SU612203A1 |