пения подкшочен к пефвому входу второго элемента ИЛИ и второму входу блока деления частоты, вторые входы первого и второго элементов ИЛИ соединены соответственно с выходами первого и второго элементов И, выход первого элемента ИЛУ соединен с вторым входом первого счетчика и с первым входом второго сч1етчика, выход второго элемента ИЛИ соединен с третьим входом первого счетчика н вторым входом второго счетчика, первый выход которого подключен к первому входу преобразователя аналог-код, второй вход и выход которого соединены соответственно с первым выходом преобразователя уго/ц-код и первым входом третьего элемента И, второй выход /второго счетчика подключен к первому первого триггера, выход блока деления частоты соединен с вторым входом первого триггера с первым входом второго триггера, с третьими входами второго счетчика и п реобразователя аналог-код и с вторым входом третьго элемента И, к тр гтьему входу которого через элемент задержки подключен выход второго триггера, первый выход блока ввода данных соединен с третьими входом упраляемого делителя частоты, вторым входом второго триггера и третьим входом блока деления частоты, четвертый вход которого подключен к входу устройства,
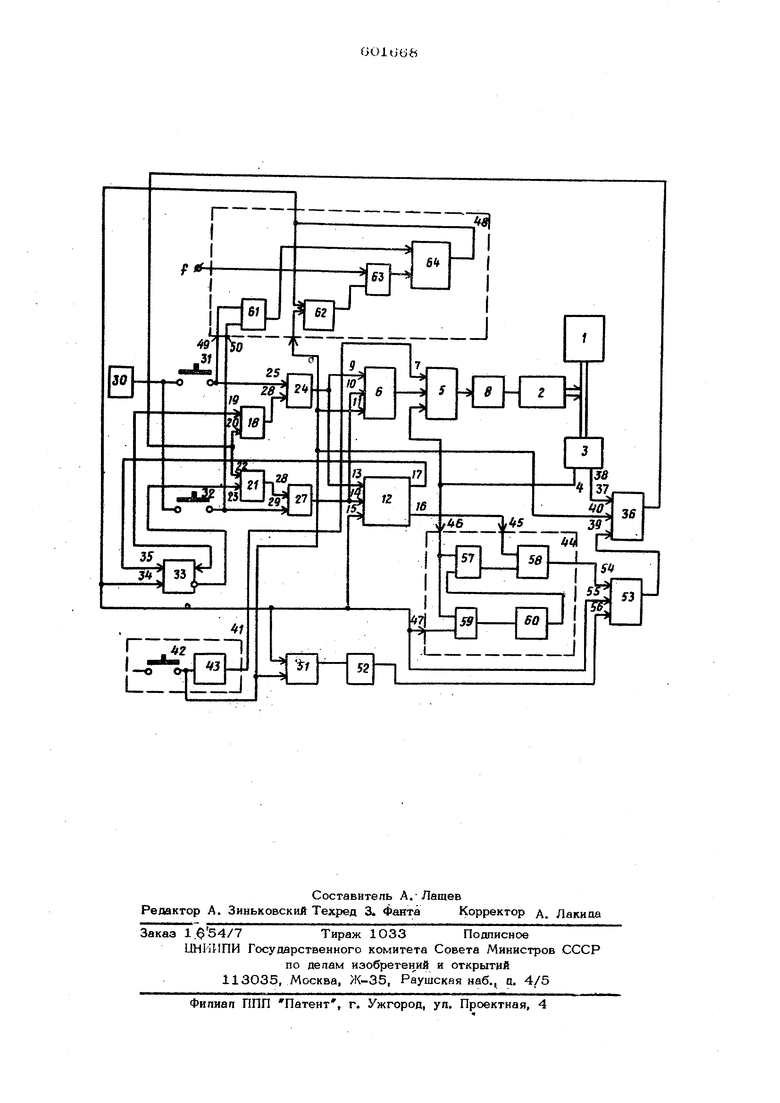
На чертеже приведена структурная электрическая схема уётройст.ва.
Устройство для пог автоматической коррекции положения телескопа 1 содержит привод 2 телескопа 1 по одной из осей, на которой установлен преобразователь 3 угла в код. Код, пропорциональный углу поворота телескопа 1, поступает с выхода 4 преобразователя 3 на вход сумматора 5, где он скпагв)вается с кодом первого счетчика 6 и кодом расчетного значения положения тепескопа 1, поступающим на вход 7. С выхода сумматора 5 код поступает на преобразователь 8 кода в аналог, управлякняий приводом 2 телескопа 1.Счетчик 6 является реверсивным, он осуществляет сложение импульсов, поступающих на вход 9, и вычитание импульсов, поступающих на вход 10
При поступлении сигнала ш обнуляющий вход 11 содержимое счетчика 6 сбрасьгоает ся В , нуль. Второй C4ef4HK 12 работает анлогично, он имеет также вход для сложе. иия 13, вход для вычитания 14 и обнуляющий вход 15. На выходе 16 формируется код, рропорциональныЙ абсолютной величине содержимого счетчика 12, а на выходе 17 пропорциональный знаку содержимого счетчика,
Первый элемент И 18 имеет входы 19 и 20, а второй элемент И 21 имеет входы
22 и 23. Первый элемент ИЛИ 24 имеет входы 25 и 26, а второй элемент ИЛИ 2 имеет входы 28 и 29. На входы элементов ИЛИ 24 и 27 поступают импульсы от генератора импульсов ЗО при воздействии на элементы ручного управления 31 и 32. Первый триггер 33 представляет собой D
триггер, который по сигналу на синхронизирующем входе 34 устанавливается в положение, определяемое сигналом на входе 35.
Управляемый делитель частоты 36 делит частоту колебаний, поступакядих на его счетный вход 37 с второго выхода 38 преобразователя 3 угла в код. На этот выход поступают сигналы младшего разряда и появление их свидетельствует о повороте npjeобразователя на угол, равный его разрешающей способности. Коаф})ициент деления управляемого делителя частоты 36 обратно пропорционален величине кода, поступающего на его управляющий вход 39, причем при коде О он равен бесконечнс1{;ти, т.е. деление не происходит. При поступлении сигнала на обнуляющий вход 40 коэффициент деления делителя устанавливается равным бесконечности.
Блок для ввода Сданных 41 при нажатии на его элемент ручного управления 42 производит прием информации в узел для вводя 43 о координатах объекта, слежение за которым должен осуществлять телескоп 1. Преобразователь 44 аналога в код имеет первьЛ вход 45, второй вход 46 и третий вход 47. Блок деления частоты 48 имеет входы 49 и 50. Второй триггер 51 связан с элементом задержки 52.
Третий элемент У 53 имеет первый вход 54, второй вход 55 и третий вход 56,
Преобразователь 44 содержит вычитатель 57, Делитель 58, элемент И 59, регистр 60.
Блок деления частоты 48 содержит элемент И71И 61, триггер 62, элемент И 63 и делитель частоты 64,
Устройство работает следукщим образом.
При включении элемента ручног управления 42 блока для ввода данных 41 обнуляются триггеры 51 и 62, счетчик 6 и управляемый делитель частоты 36,
Информация об исходных данных наблюдамого объекта поступает на вход 7 сумматора 5, где она сравнивается с фактические положением телескопа 1 по данной оси вращения; рассогласования между этими величинами преобразуются преобразователем 8 в напряжение, которое управляем приводом 2 телескопа 1,
При включении элемента ручного управпения 31 импульсы с генератора импульсов 30 будут поступать через элемент ИЛИ 24 на входы счетчиков 6 и 12, где количество их будет суммироваться. При включении эле мента 32 ручного управления импульсы, про дя через элемент ИЛИ 27, будут поступать на эти же счетчики, но количество их будет вычитаться .из содержимого-счетчиков. Код пропорциональный содержимому счетчика 6, будет поступать на вход сумматора 5, тем самым привод тенескопа 1 будет совершать дополнительное коррекционное движение, направление которого будет зависеть от того, какую клавишу нажмет оператор. Блок 48 предназначен дпя эьфаботки сиг нала окончан1 полуавтоматической коррекцин. Этот сигнал вьфабатывается с задержкой, определяемой временем, отсчитываемым делителем частоты 64 от момента нехождения обоих элементов ручного управпения 31 и 32 во включенном положении. Осушествля ется это сладукхцим образом. Если хотя бы один из элементов ручного управления 31 или 32 включен, то элемент ИЛИ 61 пере водит триггер 62 в состояние , при котором через элемент И 63 частота f поступает на счетный вхрд делителя частоты 6 4. Однако одновременно сигналы с выхода элемента ИЛИ , 61 поступают на обнуляющий вход де лителя частоты 6 4, В результате делитель оста ется при этом в нулевом состоянии, Однако кап только оба элемента ручного управления 31 и 32 будут выключены, обнупякмцнй сигнал с делителя частоты 64 снимается, и он начинает работать, .в По истечении заданной задержки на выходе делителя частоты 64 формируется сигнал окончания полуавтоматической коррекции Этот сигнал переводит триггер б2 в нуле вое положение, тем самым прекращая работу делителя частоты, который после этого остается в нулевом состоянии. Ее пи в процессе рабочЫ делителя частоты оператор включает один из элементов ручного управления 31 (32), то делитель частоты обнуляется. По сигналу с выхода делителя частоты 64 сработает триггер 51, устанавливаясь в состояние , однако этот разрешакжций сигнал на вход 56 элемента И ЗЗлриаёт после элемента задержки 52 в момент времени после окончания импульсного сигнала на входе 55, вследствие этого эпемент И 53 не срабатывает и состояние управляемого делителя частоты 36 не изменится. По сигналу окончания коррекции делителя частоты 64 сработает эпемент И 59, тем самым в регистр 60 поступит и дапее будет храниться код, пропорционапьный попожению телескопа { ), измеренному прообразователем 3 в данный момент нременн. Второй счетчик 12 сигналом с выхода делителя частоты 64 обнуляется. В процессе вращения телескопа 1 в первом счетчике 6 будет храниться код, пропорциональный величине коррекции по углу, произведенной после наведения телескопа 1, и на вход управляемого делителя частоты 36 будут поступать импульсы, количество которых пропорционально углу поворотов телескопа 1, Устройство будет находиться в таком состоянии до тех пор, пока вследствие перемещения телескопа 1 погрешность наведания его изменится на величину, ощутимую визуально на экране видеоконтрольного устройства. Это заставит оператора вновь производить полуавтоматическую коррекцию положения телескопа с помощью соответствующего элемента ручного; управления. В процессе ручной коррекции устройство будет работать аналогично описанному вьпие. К моменту формирования на выходе делителя частоты 64 сигнала окончания коррекции во втором счетчике 12 будет ;фаниться код, пропорциональный величине коррекиионного движения от последнего процесса коррекции ( ). По сигналу окончания коррекции сработает триггер 33, устанавливаясь в положение, соответствующее знаку кода счетчика коррекции. На выходе вЫчитатепя 57 формируется код, равный углу поворота телескопа 1 за промежуток времени между сигналами окончания коррекции .-I где 1 -порядковые :номера. снгналоп окончания коррекции. На выходе депителя 58 образуется код, обратно пропорционапьный углу поворота телескопа, при котором накапливается ошибка в положении телескопа 1, равная единице младшего разряда преобразователя 3 . 1 Д Ч ,Этот код поступает через открытый эпеент И 53. на вход 39 управляемого делиеля частоты 36, устанавливая соответствуюий коэффициент деления. После этого перый счетчик 6 сбрасывается в нуль. Дапее в процессе движения телескопа аждьгй раз после прохождения им угла а выходе управпяемого пеаитепя частоты 6 будет формироваться импульс, пропускаеый в соответствии с состоянием триггера 3 на вход сложения ипи вычитания счетчив 6 и 12. Тем самым будет производи ть7ся автоматическое пннейное экстраполирование коррекционного движения. К моменту новой йопуввтоматической -коррекции, осуществляемой оператором, во втором счетчике 12 будет храниться знaчeн e вепичииы артоматической коррекции движения, осущест впенного за промежуток времени, начиная от поспедаей полуавтоматической коррекции ( f экс С- ) ° значение будет учтено далее при опреоглении установке новой автоматической ксфрекциви . U)- М к. 3Kc(i) 1Ч-, .-.i Таким образом, устройство позвопяет по спе второй полуавтоматической коррекции производить автоматическую коррекцию по поженил телескопа 1 с разрешающей способ ностью по величине коррекции, равной единице мпащиего разряда преобразователя 3. Использование изооретвния позволит приблизительно в четыре-шесть раз уменьшить частоту полуавтоматической кс рекции что существенно уменьшит погрешность слежения телескопа 1. Формула изобретения Устройство для полуавтоматической коррекции положения телескопа, содержащее элементы И, ИЛИ, генератор импульсов, вы ход которого соединен с первыми входами первого и второго ,элементов ручного управ ления, блок ввода aaifltbixj первый и вторсЛ выходы .которого подключены соответствен но к первым входам первого счетчика и су матора, второй и третий входы которого со данечы соответственно с выходом первого счетчика и первым выходом преобразователя угол-код, выход сумматора через преобразователь код-аналог подключен к входу привода, выход которого механически соединен с телескопом и преобразователем уго код, отличающееся тем, что, с цепью повышения точности устройства, оно содержит делитель частоты, второй счетчик, элемент задержки, преобразователь ан лог-код, управляемый делитель частоты, третий элемент И и триггеры, первый и вт рой выходы первого триггера подключены
8 оответственно к первым входам первого и торого элементов И, вторые входь которых оединены с выходом управляемого делиеля частоты, к первому и второму входам оторого подключены соответственно второй ыход преобразователя угол-код и выход третьего элемента И, выход первого элемента ручного управления соединен с первыми входами первого элемента ИЛИ и блока деления частоты, выход второго элемента ручного управлениячподключен к первому входу второго элемента 4ЛИ и второму входу бяока деления частоты, вторые входы первого и второго элементов ИЛИ соединены соответственно с выходами первого и вт чэого элементов И, выход первого элемента ИЛИ соединен с вторым входом первого счетчика и с первым входом второго счетчика, выход второго элемента ИЛИ соединен с третьим входом первого счетчика и вт(ым входом второго счетчика, первый выход которого по/жлючен к первому входу преобразователя аналог-код, второй вход и выход которого , соединены соответствен-но с первым выходом преобразователя уголкод. и первым входом третьего элемента И, второй выход второго счетчика подключен к первому входу первого триггера, выход блока деления частоты соединен с вторым входом первого триггера, с первым входом второго триггера, с третьими входами, второго счетчика и преобразователя аналог-код и с вторым входом третьего элемента И, к третьему входу которого через элемент задержки подключен выход второго триггера, первый выход блока ввода данных соединен с третьим; входом управляемого делителя частоты, вторым входом второго триггера и третьим входом блока деления частоты, четвертый вход которого подключен к входу устройства. Источники информации, принятые во внимание при экспертизе: 1.Журкин Н, С. и др. Система управле ния телескопом диаметром 2, 6 м, сб. статей Новая техника в астрономии вып. 1, 1963.. 2.Авторское свидетельство СССР № 373686, кл. G02 В 23/00. 1973.

| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления положением телескопа | 1975 |
|
SU681418A1 |
| Система управления телескопом | 1984 |
|
SU1188699A1 |
| Устройство для полуавтоматической коррекции положения телескопа | 1975 |
|
SU684511A1 |
| Фотоэлектрическая следящая система гидирования телескопа | 1984 |
|
SU1228068A1 |
| Часовое устройство с полуавтоматической коррекцией | 1988 |
|
SU1670673A1 |
| Устройство для коррекции шкалы времени | 1991 |
|
SU1781669A1 |
| Устройство для коррекции шкалы времени | 1990 |
|
SU1709268A1 |
| УСТРОЙСТВО ДЛЯ КОРРЕКЦИИ ШКАЛЫ ВРЕМЕНИ | 1995 |
|
RU2082216C1 |
| Устройство для управления телескопом | 1974 |
|
SU511559A1 |
| Система управления телескопом | 1978 |
|
SU805251A1 |