Изобретение относится к области автоматики и астроприборостроения и может найти применение в системах управления оптическими телескопами.
Полуавтоматическая коррекция положения оптического телескопа в процессе ележения за объектом осуществляется клавишей тонкой коррекции, воздействующей на привод телескопа ijНаиболее близким по технической сущности к изобретению является устройство, содержащее два элемента И, регистр памяти, источник постоянного напряжения, подключенный через соответствуюшие элементы коррекщ1И к одному из входов первого сумматора, другой вход которого соединен с выходом преобразователя коданалог, а выход через первый привод с первым входом дифференциала, второй вход которого через редуктор соединен с выходо.м второго привода, а выход соединен непосредственно со входом тел€;скопа и через преобразователь аналог-код с первым входом второго сумматора, и генератор звездного времени. Выход последнего соединен со входом второго привода и первым входом счетчика, второй и третий входы которого соединены с соответствующими выходами триггера, а первый выход - с первым входом триггера 2 J.
Низкое быстродействие такого устройства обусловлено инерционностью .
Целью изобретения является повышешге быстродействия устройства.
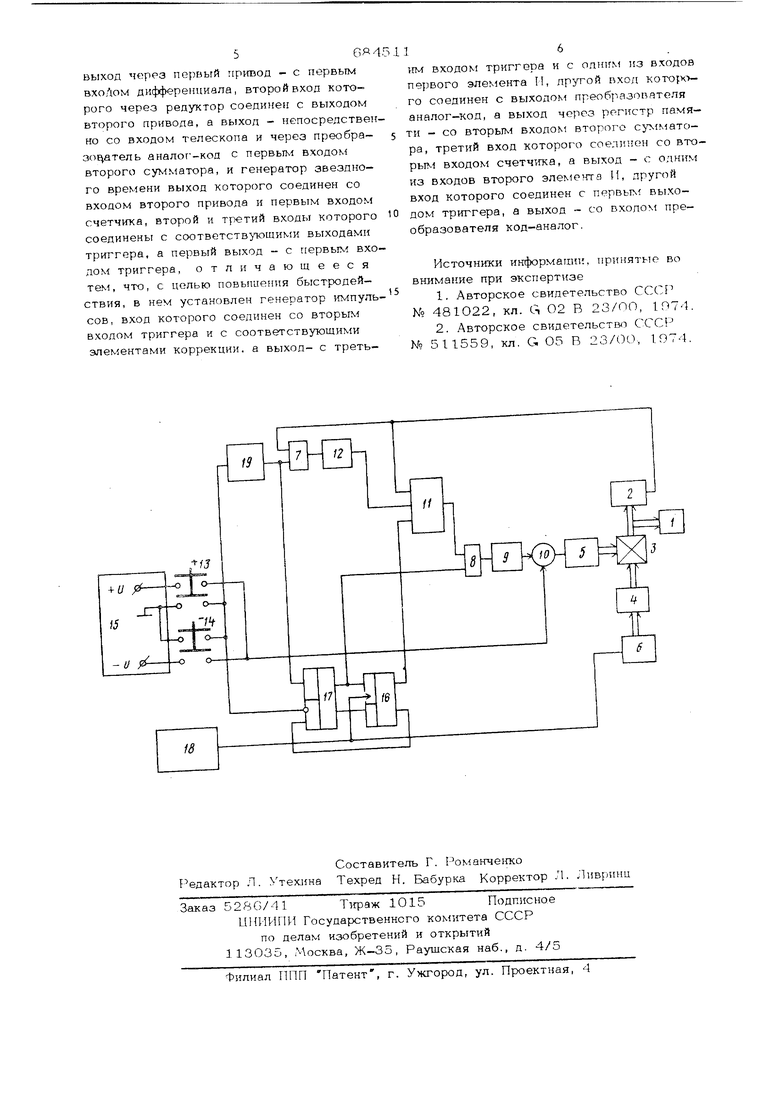
Поставленная цель достигается тем, что в предложенное устройство установлен генератор импульсов, вход которого соединен со вторые , входом Tpiirrefxi и с соответствующими элемент а tvu-i коррекции, а выход - с третьим входом триггера и с одШПч на входов первого элемента И, другой вход которого соединен с выходом преобразователя аналог-код, а выход через регистр памяти - со вторым входом второго cjJ.SMaTopa. Третий вход последнего соединен со вторым в.чодом счетчика, а выход - с одним иэ входов второго элеметтга И, другой вход которого соединен с первым выходом триггера, а выход - со входом преобразователя код-аналог. На чертеже дана схема устройства, где обозначены телескоп 1, преобраэователь аналог-код 2, дифференциал 3, редуктор 4, первый 5 и второй 6 приводы, первый 7 и второй 8 элементы И, преоб раэователь код-аналог 9, первый 10 и второй 11 сумматоры, регистр памяти 12, первый 13 и второй 14 элементы коррекций, источник постоянного напряжения 15, счетчик 16, триггер 17, генератор звездного времени 18, генератор импульсов 19, 0-постоянный сигнал. Устройство работает следующим образом. При слежении телескопа по оси време ни за исследуемым объектом его положение изменяется с помощью привода 6 двигателя часового ведения, который по сигналам генератора звездного времени 18 разворачивает через редуктор 4 и диф ференциал 3 часовую ось телескопа 1 со скоростью вращения Земли. Оператор контролирует положение телескопа по сме шению изображения звезды с перекрестия видеоконтрольного устройства. При обнаружении такого смещения через один из элементов коррекции 13, 14 (в зависимости от знака смешения) и при коррекции с постоянной скоростью напряжение соответствующего знака поступает на сум матор 1О и далее на привод тонкой коррекцки 5. При этом через дифференциал 3 осуществляется коррекшюнное движени телескопа. На экране видеоконтрольного устройства оператор наблюдает это перемещение и в момент, когда звезда оказывается на перекрестии, воздействует на элемент коррекции. При этом срабатывает генератор одиночных импульсов 19, и сиг с его выхода переводит триггер 17 в состояние и открывает элемент И 7. При этом код преобразователя аналогкод 2, пропорциональный углу поворота телескопа в этот момент времеиги (ц,.,. ) поступает для хранения в регистр памяти 12. При установке триггера 17 в сиг налы звездного времени поступают на пер вый вход счетчика 16, показание которого до этого было равно нулю,и счетчик подсчитывает их. На выходе счетчика 16 связанном со входом сумматора 11, формируется код, пропорциональный углу поворота телескопа ( ) двигателем чаового ведения, начиная с момента отжаия клавиши коррекции. С этого момента укллатор 11 начинает формироват ь код ДЧ) - ф (1) гдеср-.- текущее значение кода преобразователя, который проходит через элемент И 8 на преобразователь 9, управляющий приводом 5 (в это время напряжение элементов коррекции на суматор не поступает). Так как в рассматриваемый период времеш текущее значение кода преобразователя 9 if где - текущий угол поворота привода 5, то в соответствии с формулой (1) ЛФ (3) В момент прекращения сигнала с элемента коррекции (,) по инерции привод, управляемый в соответствии с выражением (3) продолжает движение. Переходной процесс привода 5 заканчива/ется, когда и А 0. Это происходит через время t . tlpw этом на вы-ходе счетчика 16 появляется сигнал, задержанный по отношению, к сигналу начала счета на время t , который, посту пая на вход триггера 17, переводит его в состояние О. В положении триггера О счетчик 16 обнуляется, и элемент И 8 закрывается, прекращая поступление кода. На этом коррекция положения телескопа заканчивается. Предлагаемое устройство позволяет ускорить процесс полуавтоматической кор-. рекшга положения телескопа приблизительно в 2-3 раза по сравнению с известными устройствами, что позволяет повысить быстродействие приблизительно на 1015% и повысить интегральную точность слежения телескопа на 1О-ЗО%. ормула изобретени Устройство для полуавтоматической коррекции положения телескопа, содержащее два элемента И, регистр памяти, источник постоянного напряжения, подключенный через соответствующие элементы коррекции к одному из входов первого сумматора, другой вход которого соединен с выходом преобразователя код-аналог, а 5вЯ выход через первый прртод - с первым вхоДом дифференциала, второй вход которого через редуктор соединен с выходом второго привода, а выход - непосредстве но со входом телескопа и через преобра- зоЕ атель аналог-код с первым входом второго сумматора, и генератор звездного времени выход которого соединен со входом второго привода и первым входом счетчика, второй и третий входы которого соединены с соответств тошими выходами триггера, а первый выход - с первым вхо дом триггера, отличающееся тем, что, с целью повышения быстродействия, в нем установлен генератор импуль сов, вход которого соединен со вторым входом триггера и с соответствующими элементами коррекции, а выход- с треть16vrM входом триггера и с одним из входов первого элемента II, другой вход которх го соединен с выходом преобразователя аналог-код, а выход через регистр памяти - со вторык вxoдo второго cyMN aTOра, третий вход которого соединен со вторым входом счетчика, а выход - с одним из входов второго элемента И, другой вход которого соединен с первьг выходом триггера, а выход - со входом преобразователя код аналог. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство CCCF № 481022, кл. G, О2 В 23/ПО, 1074. 2.Авторское свидетельство 511559, кл. G О5 В 23/ОО, 1074.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления телескопом | 1984 |
|
SU1188699A1 |
| Система управления телескопом | 1978 |
|
SU805251A1 |
| Устройство для полуавтоматической коррекции положения телескопа | 1974 |
|
SU601668A1 |
| Система управления положением телескопа | 1975 |
|
SU681418A1 |
| Устройство для управления телескопом на альтазимутальной монтиолвке | 1974 |
|
SU510691A1 |
| Устройство для управления телескопом | 1974 |
|
SU511559A1 |
| Система управления телескопом | 1979 |
|
SU826273A1 |
| Фотоэлектрическая следящая система гидирования телескопа | 1984 |
|
SU1228068A1 |
| Устройство для управления положением телескопа | 1975 |
|
SU552592A1 |
| Устройство для управления наведением телескопа | 1974 |
|
SU560213A1 |
