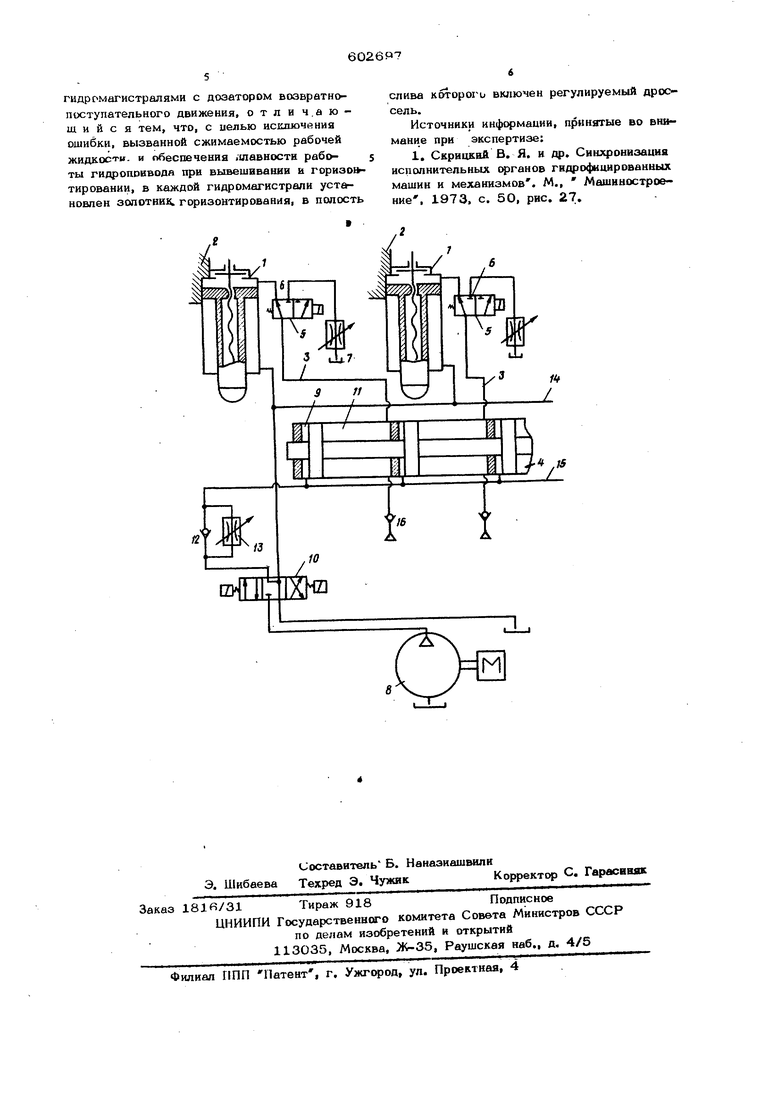
Изобретение относится к области маашно троения и может быть использовано в подъе но-транспортных механизмах для вывешивания и горнзонтирования грузовой платформы расположенной на неподготовленной плошадке. Известен гидравлический привод, содержа щий гидроопоры, установленные на платформе и связанные гидромагистралями с дозатором возвратно-псютупательного движения. l}. Применение дозатора возвратно-поступательного движения позволяетполучить вы сокую точность -синхронизации движения гидооопор при высоком кпд. Недостатком известного гидропривода является то, что он может выполнять только операции вывешивания грузовой платформы, не обеспечивая операций горизонтирования. Цель изобретения - исключение ошибки, вызванной сжимаемостью рабочей жидкости, и обеспечение плавности работы гидропривода при йывешивании и горизонтированииУказанная цель достигается тем, что в каждой гидромагистрали установлен золотник горнзонтирования, в полость слива которого включен регулируемый дроссель. На чертеже представлена схема гидрав лического привода перемещения грузовой платформы. Предлагаемый гидравлический привод содержит гидровинтовые опоры 1, установленные на грузовой платформе 2 и связанные гидромагистралями 3 с дозатором 4 возвратно-поступательногб движения, Б гндромагистралях 3 расположены золотники 5 горизонтирования, в полость 6 слива которых включены регулируемые дроссели 7, настроенные на величину рабочего давления, определяемого расчетной нагрузкой на платформу. Для уменьшения влияния температуры окружающей среды на работу устройства регулируемые дроссели 7 настраиваются с учетом летних и зимних условий работы. Насос 8 соединен с полостями 9 дозатора 4 через реверсивный золотник 10, служащий для изменения направления движения дозатсфа. Число полостей 9 и 11 дова 4 возвратно-поступательного движения равно количеству гидфошюр 1. Крок«е того, в гидроликии между насосом & к полостями 9 дозатора 4 установлен обратный клапан iZc регулируемым /фосселем 13, которые предназначены дла свободного пропускания масла от насоса 8. к дозатору 4 при подьеме платформы 2. и для ограничения скс ооти Д вижения платформы при.ее опусканив. Штоковыё полости гидроопор 1 через реверсивный зопотник 1О Связаны в зависит мости от положения последнего с масляным баком, либо с насосом 8, Гидролинии 14 и 15 соединяют соответственно штоковые полости всех гидроопор 1 (в том числе и не показанных на чертеже) и все полости 9 дозатора 4. Через обратные клапаны 16, присоединенные к полоетям 11 дозатора 4, производится подпитка гидросистемы от постороннего источника питания (на чертеже не показан). Гидравлический привод перемещения грузо вой платформь работает следующим образом В начальный момент все золотники занимают позиции, изображенные на чертеже. После запуска насоса 8 реверсивный золотник Ю переключается в левую позицию. Масло от насоса 8 через реверсивный золот йик ip и обратный клапан 12 поступает в ni лостн Э дозатора 4 возвратно-поступательн го движения, в результате чего его поршни движутся вправо. Вытесняемое из полостей 11 масло поступает через золотника горизо тированиа в поршневые полости гидроопор 1, тем самым осуществляя движение платформы 2 вверх.. Из штоковых поп остей гидроопор 1 масл через реверсивный золотник 10 сливается в бак. Таким образом осуществляется вывеша вание платформы. Г.рризонтирован ие платформы 2 осушествлдется путем пере ючеаия золотников горизоатирования, связанных с опережающими гидроопцрами 1, в правую позицию, при этом масло из соотвехств щишх аодостей 11 дозатора 4 возвратно-поступательного двЕженЕЯ через дегулируемыв дроссели 7 поступает в бак. Отстающие гвдроопоры про должают движение вверх. Вследствие того, что регулируемые фрссели 7 настроены на рабочее давление, все гидромагистрали и полости дозатора возвратно-поступателэвого движения ваходатся под давлением, чем обеспечивается плавность работы привода при горнзовтвроварии независимо от ПОЗИЦИЙ занимаемых золотниками горич зонтирования 5, и уменьшается влияние сжимаемостимасла, находящегоря ьаджду золотниками горизоитирования 5 и поршнями дозатора 4, на точность горизонтирования платформы 2. По достижении заданной точности горизонтирования зопотники горизонтировакия 5 переключаются в левую позицию. .. После подъема платформы 2 на величину рабочего хода реверсивный золотник 10 переключается в среднее положение, а насос 8 выключается. Нагрузка от веса платформы 2 воспринимается винтами гидроопор 1. Следует отметить, что гидравлический привод позволяет производить горизонтирова1ние как до, так и в процессе синхронизированного подъема платформы. Для опускания платформы 2 после пуска насоса 8 реверсивный золотник 10 на некоторое время переключается в левую позицию дпя разгрузки виитов гидроопор 1, а затем в правую позицию. Масло от насоса 8 поступа- пает в штоковые полости гидроопор 1., Под действием внешней нагрузки и давления маола в штоковых полостях гидроопор 1 платформа 2 синхронно движется вннз. При этом масло, вытесняемое из поршневых полостей гидроопор 1, поступает в полости 11 дозатора 4, осуществляя перемещение его влейо. Из полостей 9 дозатора 4 маеЛО через регулируемый дроссель 13 и реверсивный золотник 10 поступает в бак. Скорость опускания платформы 2. определяет ся настройкой регулируемого дросселя 13, Для подпитки полостей 11 дозатора 4 в конце опускания платформы 2 масло от ис- точшша питания {не показан на чертенке) через обратные клапаны 16 подается в полости 11. После опускания платформы 2 реверсивный золотник ip переключается в среднее положение , а насос выключается. Установка в каждой гидромагистрали, связываюЩей дозатор возвратно-поступательного движения с гидроопорами, золотника горизонтирования, в полость слива которого Ъключен регулируемый дроссель, обеспечавает возможность выполнения операций BI вешивания и горизонтирования, исключая ошибки, вызванные сжимаемостью рабочей жидкости при обеспечении плавности ты гидропривода при гс изонтировании. Формул а.изобретения Гидравлический привод перемещения грузовой платфсфмы, содержащий гидроопоры, установленные на платформе и связанные
гидромагистралями с дозатором возвратнопоступательного движения, отлич.ающ и и с я тем, что, с иелью исключиния ошибки, вызванной сжимаемостью рабочей жидкости, и обеспечения .шавности работы гидропоивода при вывешивании и горизо тировании, в каждой гидромагистрали установлен золотник горизонтированйя, в полость
слива которого включен регулируемый дроссель.
Источники информации, принятые во внимание при экспертизе:
1. Скрнцквй В. Я. и др. Синхронизация исполнительных саганов гидрофицнрованных машин и механизмов . М., Машиностроение, 1973. с. 50, рис. 27.
/«
| название | год | авторы | номер документа |
|---|---|---|---|
| Гидравлический привод вывешивания и горизонтирования грузовой платформы | 1976 |
|
SU657184A1 |
| Гидравлический привод вывешивания и горизонтирования грузовой платформы | 1978 |
|
SU769120A1 |
| ГИДРАВЛИЧЕСКИЙ ПРИВОД ВЫВЕШИВАНИЯ И ГОРИЗОНТИРОВАНИЯ ГРУЗОВОЙ ПЛАТФОРМЫ | 2011 |
|
RU2464452C1 |
| ГИДРАВЛИЧЕСКИЙ ПРИВОД ВЫВЕШИВАНИЯ И ГОРИЗОНТИРОВАНИЯ ГРУЗОВОЙ ПЛАТФОРМЫ | 2003 |
|
RU2240448C1 |
| ГИДРАВЛИЧЕСКИЙ ПРИВОД ВЫВЕШИВАНИЯ И ГОРИЗОНТИРОВАНИЯ ГРУЗОВОЙ ПЛАТФОРМЫ | 2004 |
|
RU2258160C1 |
| ГИДРАВЛИЧЕСКИЙ ПРИВОД ВЫВЕШИВАНИЯ И ГОРИЗОНТИРОВАНИЯ ГРУЗОВОЙ ПЛАТФОРМЫ | 1995 |
|
RU2103566C1 |
| ГИДРАВЛИЧЕСКИЙ ПРИВОД ВЫВЕШИВАНИЯ И ГОРИЗОНТИРОВАНИЯ ГРУЗОВОЙ ПЛАТФОРМЫ | 2011 |
|
RU2464453C1 |
| Гидравлический привод вывешивания и горизонтирования грузовой платформы | 1978 |
|
SU731088A2 |
| ГИДРАВЛИЧЕСКИЙ ПРИВОД ВЫВЕШИВАНИЯ И ГОРИЗОНТИРОВАНИЯ ГРУЗОВОЙ ПЛАТФОРМЫ | 1996 |
|
RU2115030C1 |
| ГИДРАВЛИЧЕСКИЙ ПРИВОД ВЫВЕШИВАНИЯ И ГОРИЗОНТИРОВАНИЯ ГРУЗОВОЙ ПЛАТФОРМЫ | 1996 |
|
RU2128789C1 |
