Изобретение относится к области авиационной техники, а именно к системам управления летательного аппарата (ЛА) в продольном канале.
Современные маневренные ЛА управляются с помощью систем дистанционного управления (СДУ), включающих в свой состав ограничители предельных режимов (ОПР) по перегрузке и углу атаки (Оболенский Ю.Г. Управление полетом маневренных самолетов. - М.: филиал Воениздат, 2007. - 480 с., с. 240-263; Дубов Ю.Б. Динамика маневренного самолета на больших углах атаки. - Санкт-Петербург. Издательство СПбГЭТУ «ЛЭТИ», 2018. - 391 с., с. 262-274). Наиболее близкая система управления по отношению к заявляемой рассмотрена в работе «Аэродинамика, устойчивость и управляемость сверхзвуковых самолетов / под ред. Г.С. Бюшгенса. - М.: Наука. Физматлит, 1998. - 816 с., с. 594. рис. 13.2.1; с. 604, рис. 13.3.1.
Недостаток известных систем заключается в том, что ограничитель предельных режимов, входящий в состав СДУ, как и любая динамическая система, имеет пределы по максимальным значениям коэффициентов усиления, обусловленные требованием обеспечения устойчивости динамического контура управления. Для ЛА с высокой степенью продольной неустойчивости допустимые значения коэффициентов усиления оказываются недостаточными для обеспечения требований к точности ограничения предельно допустимых углов атаки и нормальной перегрузки.
Прототип заявляемой системы продольного управления ЛА содержит вычислительное устройство (ВУ), формирующее алгоритмы функционирования СДУ и ОПР, систему воздушных сигналов (СВС), сигналы с выходов которой по числу М, динамическому скоростному напору и статическому давлению подключены к входам ВУ, датчики перемещения рычага управления ЛА по тангажу, перегрузки, угловой скорости тангажа и угла атаки, сигналы с выходов которых соединены с входами ВУ, рулевой привод (РП), стабилизатор (руль высоты), соединенный с выходом РП. Состав СДУ и ОПР представлен на рис. 13.2.1 и на рис. 13.3.1 соответственно. На вход РП поступает сигнал с выхода ВУ.
Целью изобретения является обеспечение заданной точности ограничения предельного режима полета для конфигураций ЛА с предельно задними центровками за счет формирования дополнительного сигнала на орган продольного управления с целью обеспечения пикирующего момента, достаточного для предотвращения выхода ЛА за допустимые пределы значений угла атаки и нормальной перегрузки.
Технический результат - повышение надежности системы управления ЛА.
Ожидаемый технический результат достигается тем, что система продольного управления ЛА дополнительно содержит последовательно соединенные блок формирования постоянного сигнала, первый и второй блоки перемножения и ключ, блок формирования сигнала на отклонение носков ЛА, первый, второй и третий нелинейные блоки, первый и второй сумматоры, логический блок, сигнал с выхода которого подключен к управляющему входу ключа, первый и второй входы первого сумматора соединены соответственно с выходами блока формирования сигнала на отклонение носков ЛА и второго нелинейного блока, входы первого, второго и третьего нелинейных блоков подключены соответственно к выходам СВС по сигналам числа М, динамического давления и к выходу первого сумматора, выходы первого и третьего нелинейных блоков соединены соответственно с вторыми входами первого и второго блоков перемножения, первый и второй входы второго сумматора подключены соответственно к выходам ключа и ВУ, а выход второго сумматора соединен с входом РП.
В заявляемой системе продольного управления при наличии конфигурации ЛА, обладающего предельно - задними центровками и наибольшей степенью продольной неустойчивости, формируется признак для подключения дополнительной цепи алгоритма управления, обеспечивающей отклонение органа продольного управления (стабилизатора) для исключения возможности превышения допустимого значения контролируемого параметра (угла атаки, нормальной перегрузки). В качестве признаков указанной конфигурации могут использоваться допустимые значения нормальной перегрузки, соответствующие определенному виду подвесок по назначению их применения, в совокупности с признаками размещения подвесок - разовыми командами. Дополнительная цепь алгоритма управления обеспечивает связь угла отклонения стабилизатора с углом отклонения адаптивных носков крыла, управляемых по соответствующему закону оптимизации аэродинамических характеристик ЛА в зависимости от текущих значений числа М и угла атаки. Такое опосредованное воздействие на орган продольного управления ЛА позволяет построить адаптивный алгоритм с плавным вводом дополнительной цепи управления без больших коэффициентов усиления в структуре ОПР.
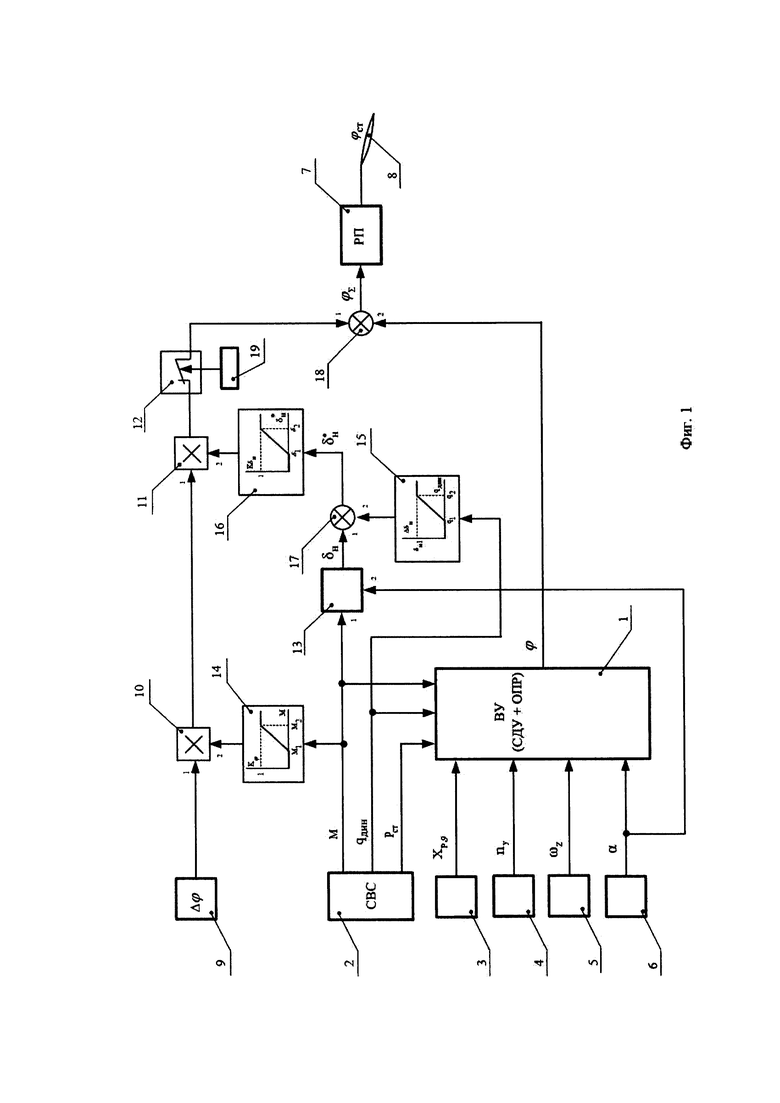
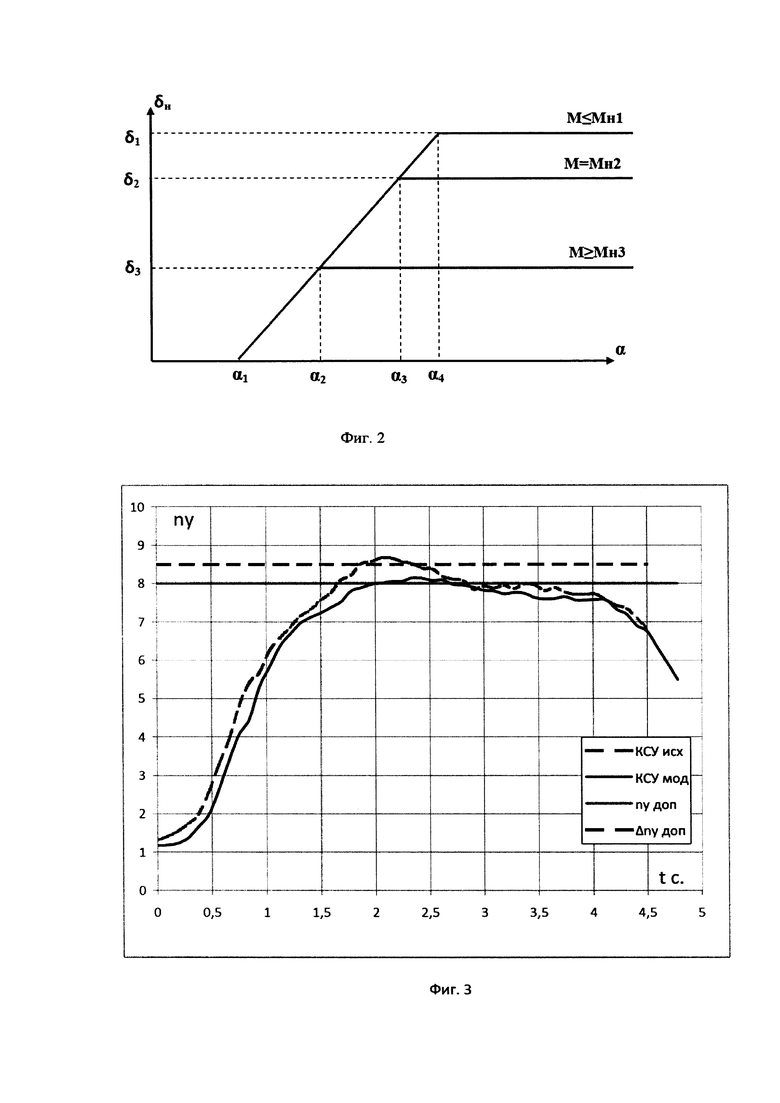
Сущность изобретения поясняется графическими изображениями. На фиг. 1 представлена структурная схема системы продольного управления ЛА, на фиг. 2 показана реализация блока формирования сигнала на отклонение носков ЛА, на фиг. 3 изображены графики изменения текущего значения нормальной перегрузки ЛА с большой степенью продольной неустойчивости с исходной системой управления с интегральным ОПР и с предлагаемой системой управления. На графических изображениях приняты следующие обозначения:
1 - вычислительное устройство, реализующее алгоритмы управления СДУ и ОПР;
2 - система воздушных сигналов;
3, 4, 5, 6 - датчики соответственно перемещения рычага управления ЛА по тангажу, перегрузки, угловой скорости тангажа и угла атаки;
7 - рулевой привод;
8 - стабилизатор (руль высоты) ЛА;
9 - блок формирования постоянного сигнала Δϕ на дополнительное отклонение стабилизатора;
10, 11 - первый и второй блоки перемножения;
12 - ключ;
13 - блок формирования сигнала на отклонение носков ЛА;
14, 15, 16 - первый, второй и третий нелинейные блоки;
17, 18 - первый и второй сумматоры;
19 - логический блок;
М, qдин, Рст - сигналы числа М, динамического скоростного напора и статического давления;
α - угол атаки ЛА;
α1, α2, α3, α4 - опорные значения угла атаки;
Мн1, Мн2, Мн3 - опорные значения числа М;
ϕ - сигнал на выходе ВУ 1;
ϕ∑ - результирующий сигнал угла отклонения стабилизатора;
Δϕ - сигнал дополнительного углового отклонения стабилизатора;
δн - сигнал на отклонение носков;
 - скорректированный сигнал на отклонение носков;
- скорректированный сигнал на отклонение носков;
ϕ∑ - суммарный сигнал отклонения стабилизатора 8;
Δδн - величина коррекции сигнала отклонения носков;
q1, q2 - опорные значения динамического скоростного напора,
δн1 - максимальное значение корректирующего сигнала отклонения носков;
м1, м2 - опорные значения числа М в первом нелинейном блоке;
Kϕ - корректирующий коэффициент усиления сигнала Δϕ по числу М;
δ1, δ2 - опорные значения углов отклонения носков в третьем нелинейном блоке;
Kδн - корректирующий коэффициент усиления сигнала Δϕ по сигналу 
Система продольного управления ЛА содержит вычислительное устройство (ВУ) 1, формирующее алгоритмы функционирования системы дистанционного управления (СДУ) ЛА и ограничителя предельных режимов (ОПР), систему воздушных сигналов (СВС) 2, сигналы с выходов которой по числу М, динамическому скоростному напору и статическому давлению подключены к входам ВУ 1, датчики перемещения рычага управления ЛА по тангажу 3, перегрузки 4, угловой скорости тангажа 5 и угла атаки 6, сигналы с выходов которых подключены к входами ВУ 1, рулевой привод 7, стабилизатор (руль высоты) 8, соединенный с выходом РП 7. Дополнительно система продольного управления ЛА содержит последовательно соединенные блок 9 формирования постоянного сигнала, первый и второй блоки перемножения 10, И и ключ 12, блок 13 формирования сигнала на отклонение носков ЛА, первый, второй и третий нелинейные блоки 14, 15, 16, первый и второй сумматоры 17, 18, логический блок 19, сигнал с выхода которого подключен к управляющему входу ключа 12, первый и второй входы первого сумматора 17 соединены соответственно с выходами блока 13 формирования сигнала на отклонение носков ЛА и второго нелинейного блока 15, входы первого, второго и третьего нелинейных блоков 14, 15, 16 соединены соответственно с выходами СВС 2 по сигналам числа М, динамического давления и с выходом первого сумматора 17, выходы первого и третьего нелинейных блоков 14, 16 соединены соответственно с вторыми входами первого и второго блоков перемножения 10, 11, первый и второй входы второго сумматора 18 подключены соответственно к выходам ключа 12 и ВУ 1, а выход второго сумматора 18 соединен с входом РП 7.
Логический блок 19 служит для подключения через контактную группу ключа 12 сигнала дополнительного углового отклонения стабилизатора Δϕ, скорректированного по величине в блоках перемножения 10 и 11 при определенных конфигурациях ЛА с предельно задними центровками. Условия подключения этого сигнала определяются конкретным типом маневренного ЛА. Сигнал П на выходе блока логики 19 на переключение ключа 12, в частности, формируется следующим образом:
П=1 если (nудоп≤nупор) ИЛИ А=1 ИЛИ G=1 ИЛИ F=1,
где ИЛИ - операция логического сложения;
А=1 - признак наличия одной подвески «воздух-воздух»;
G=1 - признак наличия двух подвесок «воздух-воздух»;
F=1 - признак отсутствия подвесок;
nудоп - допустимое значение перегрузки;
nупор - некоторое пороговое значение перегрузки, позволяющее подключать сигнал дополнительного углового отклонения стабилизатора Δϕ для конкретных отдельных вариантов подвесок.
При П=1 контактная группа ключа 12 переводится в разомкнутое положение, т.е. дополнительный сигнал Δϕ на стабилизатор 8 не подается.
Работа системы продольного управления ЛА осуществляется следующим образом. ВУ 1 по сигналам от СВС 2 и от датчиков 3, 4, 5, 6 формирует управляющий сигнал ϕ на вход рулевого привода РП 7, который, отклоняя соответствующим образом орган продольного управления на угол ϕст, обеспечивает вид движения ЛА в продольной плоскости согласно алгоритму, заложенному в ВУ 1. Этот алгоритм содержит, в том числе, и закон ограничения предельных параметров (угла атаки, нормальной перегрузки), реализуемый с помощью интегрального ограничителя предельных режимов, описанного в прототипе. В то же время блок 13 формирует закон отклонения носков крыла ЛА в зависимости от текущих значений числа М из СВС 2 и угла атаки с выхода датчика 6. Реализуемый в блоке 13 закон управления носками формируется в зависимости от высотно-скоростных параметров и параметров пространственного движения и определяется конкретным типом ЛА. В частности, блок 13 может иметь вид, представленный на фиг. 2.
В случае, если ЛА имеет конфигурацию с большой степенью продольной неустойчивости (в том числе из-за большого количества подвесок, смещающих центровку ЛА назад, а фокус ЛА - вперед), когда предельный коэффициент усиления в структуре ОПР становится недостаточным для того, чтобы обеспечить эффективное ограничение предельного параметра с заданной точностью, в логическом блоке 19 формируется сигнал на замыкание контактной группы ключа 12 для подключения дополнительной цепи, позволяющей сформировать дополнительный сигнал, поступающий на РП 7 и обеспечивающий достаточный пикирующий момент для исключения заброса предельного параметра (нормальной перегрузки, угла атаки) выше допустимого значения. Сигнал на выходе логического блока 19 формируется за счет сравнения ряда пороговых значений фазовых координат - таких, как допустимое значение нормальной перегрузки и разовых команд - признаков наличия подвесных грузов на имеющихся узлах подвески. Пример формирования признака «П» переключения ключа 12 приведен выше.
С выхода блока 9 постоянный сигнал Δϕ поступает на первый вход первого блока умножения 10. На второй вход этого блока поступает величина коэффициента усиления кϕ, сформированного на выходе первого нелинейного блока 14 в зависимости от текущего значения числа М, поступающего на управляющий вход блока 14 из СВС 2. Блок 14 в диапазоне опорных значений чисел M1÷М2 обеспечивает «ввод» в действие дополнительной цепи формирования пикирующего момента ЛА в зоне недостаточной эффективности работы основного интегрального ОПР при М≥М1. Полученный сигнал с выхода первого блока перемножения 10 направляется на первый вход второго блока умножения 11.
Сформированный в блоке 13 сигнал текущего значения угла отклонения носков крыла δн поступает с выхода этого блока на первый вход первого сумматора 17, в котором эта величина складывается с поступившим на второй вход этого сумматора выходным сигналом второго нелинейного блока 15, формирующего величину поправки Δδн в зависимости от текущего значения qдин, поступающего из СВС 2. Указанная поправка далее за счет формирования значения сигнала  позволяет определить эквивалент той величине угла отклонения носка крыла, которая после преобразования в третьем нелинейном блоке 16 дает возможность получить дополнительное отклонение стабилизатора, необходимое на данном режиме полета. То есть, опосредованно через значение Δδн осуществляется коррекция по режиму полета необходимой величины Δϕ.
позволяет определить эквивалент той величине угла отклонения носка крыла, которая после преобразования в третьем нелинейном блоке 16 дает возможность получить дополнительное отклонение стабилизатора, необходимое на данном режиме полета. То есть, опосредованно через значение Δδн осуществляется коррекция по режиму полета необходимой величины Δϕ.
Полученная на выходе первого сумматора 17 сумма сигналов в виде сигнала  направляется в качестве аргумента на вход третьего нелинейного блока 16, который формирует переменный в зависимости от
направляется в качестве аргумента на вход третьего нелинейного блока 16, который формирует переменный в зависимости от  коэффициент усиления Kδн, который поступает на второй вход второго блока умножения 11. Переменный коэффициент усиления Kδн позволяет регулировать величину потребного дополнительного отклонения стабилизатора для создания пикирующего момента от 0 до Δϕ в соответствии с текущим режимом полета за счет выбора потребных опорных значений углов отклонения носка крыла δ1, δ2. Эти углы определяют собой интегрально текущие фазовые координаты продольного движения, т.к. сами эти значения являются функциями режима полета за счет того, что носки крыла отклоняются по определенному закону.
коэффициент усиления Kδн, который поступает на второй вход второго блока умножения 11. Переменный коэффициент усиления Kδн позволяет регулировать величину потребного дополнительного отклонения стабилизатора для создания пикирующего момента от 0 до Δϕ в соответствии с текущим режимом полета за счет выбора потребных опорных значений углов отклонения носка крыла δ1, δ2. Эти углы определяют собой интегрально текущие фазовые координаты продольного движения, т.к. сами эти значения являются функциями режима полета за счет того, что носки крыла отклоняются по определенному закону.
Результирующий сигнал на выходе второго блока перемножения 11 представляет собой величину потребного дополнительного угла отклонения органа продольного управления ЛА для обеспечения нужного уровня ограничения предельного параметра (угла атаки, нормальной перегрузки) для конфигурации с большой степенью продольной неустойчивости. В случае, если ключ 12 находится в замкнутом положении, т.е. когда логический блок 19 определил конфигурацию ЛА, как относящуюся к варианту загрузки с большой степенью продольной неустойчивости, сигнал с выхода второго блока перемножения 11 через ключ 12 поступает на первый вход второго сумматора 18, где «подмешивается» к основному управляющему сигналу ϕ системы, поступившему на второй вход блока 18. Полученный на выходе второго сумматора 18 результирующий управляющий сигнал ϕ∑ обеспечивает надлежащее управление ЛА в продольной плоскости, в том числе ограничение текущих значений предельных параметров (угла атаки, перегрузки) за счет соответствующего отклонения органа продольного управления 8 через привод 7.
На фиг. 3 представлено сравнение изменения текущего значения нормальной перегрузки в центре тяжести ЛА с большой степенью продольной неустойчивости при выполнении «дачи» рычага управления по тангажу «на себя» до полного отклонения. На рисунке обозначено:
КСУисх - исходная система управления с интегральным ОПР;
КСУмод - предлагаемая (модифицированная) система управления;
nудоп - допустимое значение нормальной перегрузки;
Δny - допуск на выдерживание системой управления заданного значения допустимой нормальной перегрузки;
nу - текущее значение нормальной перегрузки;
t - текущее время, с.
Как видно, применение предложенной системы управления существенно уменьшает заброс нормальной перегрузки при выполнении маневра в вертикальной плоскости.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА УПРАВЛЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА В КАНАЛЕ КУРСА | 2021 |
|
RU2768310C1 |
| СПОСОБ И СИСТЕМА УПРАВЛЕНИЯ ДВУХКИЛЕВОГО ПИЛОТИРУЕМОГО ЛЕТАТЕЛЬНОГО АППАРАТА В КАНАЛЕ КУРСА | 2020 |
|
RU2765837C1 |
| СИСТЕМА УПРАВЛЕНИЯ ПИЛОТИРУЕМОГО ЛЕТАТЕЛЬНОГО АППАРАТА С АДАПТИВНОЙ ПЕРЕКРЕСТНОЙ СВЯЗЬЮ | 2019 |
|
RU2736400C1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ ПИЛОТИРУЕМОГО ЛЕТАТЕЛЬНОГО АППАРАТА В КАНАЛЕ КРЕНА | 2020 |
|
RU2753776C1 |
| СИСТЕМА ДИСТАНЦИОННОГО УПРАВЛЕНИЯ САМОЛЕТОМ В БОКОВОМ ДВИЖЕНИИ | 2017 |
|
RU2671063C1 |
| ОГРАНИЧИТЕЛЬ ПРЕДЕЛЬНЫХ РЕЖИМОВ ПОЛЕТА МАНЕВРЕННОГО САМОЛЕТА ПО ПЕРЕГРУЗКЕ | 2019 |
|
RU2711040C1 |
| ДИСТАНЦИОННАЯ РЕЗЕРВИРОВАННАЯ СИСТЕМА АВТОМАТИЗИРОВАННОГО МОДАЛЬНОГО УПРАВЛЕНИЯ В ПРОДОЛЬНОМ КАНАЛЕ МАНЕВРЕННЫХ ПИЛОТИРУЕМЫХ И БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2015 |
|
RU2645589C2 |
| СИСТЕМА АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ САМОЛЕТОМ В ПРОДОЛЬНОМ КАНАЛЕ ПРИ ДОЗАПРАВКЕ В ВОЗДУХЕ | 2022 |
|
RU2833735C2 |
| ОГРАНИЧИТЕЛЬ ПРЕДЕЛЬНЫХ РЕЖИМОВ ПОЛЕТА МАНЕВРЕННОГО САМОЛЕТА | 2019 |
|
RU2719711C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ САМОЛЕТОМ ПРИ СНИЖЕНИИ НА ЭТАПЕ СТАБИЛИЗАЦИИ ВЫСОТЫ КРУГА | 2018 |
|
RU2703378C1 |
Система продольного управления летательного аппарата (ЛА) содержит вычислительное устройство (ВУ), систему воздушных сигналов (СВС), датчики перемещения рычага управления ЛА по тангажу, перегрузке, угловой скорости тангажа и угла атаки, рулевой привод (РП), стабилизатор (руль высоты), блок формирования постоянного сигнала на дополнительное отклонение стабилизатора, два блока перемножения и ключ, блок формирования сигнала на отклонение носков ЛА, три нелинейных блока, два сумматора, логический блок, соединенные определенным образом. Обеспечивается повышение надежности системы управления ЛА за счет предотвращения выхода ЛА за допустимые пределы значений угла атаки и нормальной перегрузки. 1 з.п. ф-лы, 3 ил.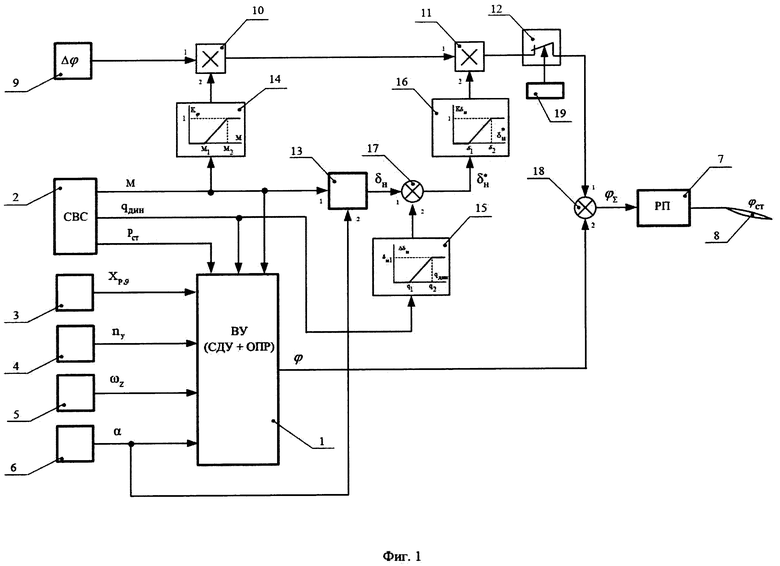
1. Система продольного управления летательного аппарата (ЛА), содержащая вычислительное устройство (ВУ), формирующее алгоритмы функционирования системы дистанционного управления ЛА и ограничителя предельных режимов по перегрузке и углу атаки, систему воздушных сигналов (СВС), сигналы с выходов которой по числу М, динамическому скоростному напору и статическому давлению подключены к входам ВУ, датчики перемещения рычага управления ЛА по тангажу, перегрузке, угловой скорости тангажа и углу атаки, сигналы с выходов которых подключены к входами ВУ, рулевой привод (РП), стабилизатор или руль высоты, соединенный с выходом РП, дополнительно включающая в себя последовательно соединенные блок формирования постоянного сигнала на дополнительное отклонение стабилизатора, первый и второй блоки перемножения и ключ, блок формирования сигнала на отклонение носков ЛА, первый, второй и третий нелинейные блоки, первый и второй сумматоры, логический блок, сигнал с выхода которого подключен к управляющему входу ключа, первый и второй входы первого сумматора соединены соответственно с выходами блока формирования сигнала на отклонение носков ЛА и второго нелинейного блока, входы первого, второго и третьего нелинейных блоков соединены соответственно с выходами СВС по сигналам числа М, динамического давления и с выходом первого сумматора, выходы первого и третьего нелинейных блоков соединены соответственно с вторыми входами первого и второго блоков перемножения, первый и второй входы второго сумматора подключены соответственно к выходам ключа и ВУ, а выход второго сумматора соединен с входом РП.
2. Система продольного управления летательного аппарата по п. 1, отличающаяся тем, что блок формирования сигнала на отклонение носков ЛА реализован в виде нелинейной зависимости от высотно-скоростных параметров и параметров пространственного движения, вид и характер изменения которой определяется конкретным ЛА.
| СПОСОБ И УСТРОЙСТВО ОГРАНИЧЕНИЯ УГЛА АТАКИ И ПЕРЕГРУЗКИ САМОЛЕТА | 2002 |
|
RU2248304C2 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПОЛЕТОМ ВЫСОКОМАНЕВРЕННОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2010 |
|
RU2459230C2 |
| САМОЛЕТ С СИСТЕМОЙ ДИСТАНЦИОННОГО УПРАВЛЕНИЯ | 2011 |
|
RU2472672C1 |
| CN 108883824 A, 23.11.2018 | |||
| CN 106347636 A, 25.01.2017. | |||

