Изобретение относится к устройствам управления положением рабочего органа землеройных, планировочных и иных строительно-дорожных машин относительно их курса или угла наклона в поперечной или продольной плоскости.
Известна аппаратура для автоматической стабилизации наклона мобильной машины относительно горизонта, включаюш,ая датчик положения, задатчик/усилитель сигнала рассогласования, усилитель мош,ности и электрогидравлическое исполнительное устройство 1.
Однако в этом устройстве выходной сигнал представлен напряжением постоянного тока, величина которого пропорциональна сигналу ошибки, что не позволяет получить пропорцио.нальную характеристику регулятора при его работе на электрогидравлическом исполнительном устройстве дискретного действия.
Известна также система автоматической стабилизации поперечного наклона отвала автогрейдера, включающая датчик положения отвала, задатчик, генератор, усилитель сигнала рассогласования, демодулятор, усилитель мощности и электрогидравлическое исполнительное устройство 2.
Недостатком этого устройства является то, что длительность импульсного управляющего
сигнала не изменяется с изменением величины рассогласования, что не позволяет достигнуть высокой позиционной точности системы.
Известно устройство управления положением рабочего органа строительно-дорожных мащин, содержащее датчик и задатчик положения рабочего органа, блок сравнения, модулятор сигналов, усилитель и исполнительный механизм, которое устраняет недостаток, присущий указанной системе стабилизации и вырабатывает управляющий сигнал, пропорциональный величине рассогласования 3.
Устройство имеет ряд существенных недостатков. Прежде всего, в данной систе ;1 :пдулированный сигнал рассогласоБа}П1я пост пает на два сравнивающих устройства (триггеры Шмидта), чувствительность которых должна настраиваться индивидуально. В таком устройстве невозможно уиравление чувствите;1ьностью системы путем изменения одного из параметров, например чувствительности измерительного участка схемы. Отсутствует возможность регулировки статической характеристики устройства управления, не обеспечивается возможность работы системы с исполнительными механизмами пропорционального управления, так как имеет зону нечувствительности,
плохо регулируемую в области нулевого сигнала (косла ист рассогласования), к|:1()ме того невозможно в широком диапа зоне управлять чувствительностью и диапазоном изменения линейного {LHHpoTHO-модулированного) сигнала за счет изменения крутизны треуголыиях имнульсов,-так как их урове1н в значительнон мере онределяется уровнем срабатывания трисIepOB Шмидта, что в конечном итоге приводит к уменьн1ен1но точности унравлення.
Цель изобретения - упрощение конструкции и повышенне точности управления.
Для этого предлагаемое устройство снабжено блоком регулирования уровня и блоком суммнр()ва1П1я, к входам которого подключены задатчик иоложення рабочего органа и моду.чятор еигналов, подключенный к выходу блока регулнровки уровня, а выход блока суммирова1Н1Я и выход датчика положения иодключены к блоку сравнения.
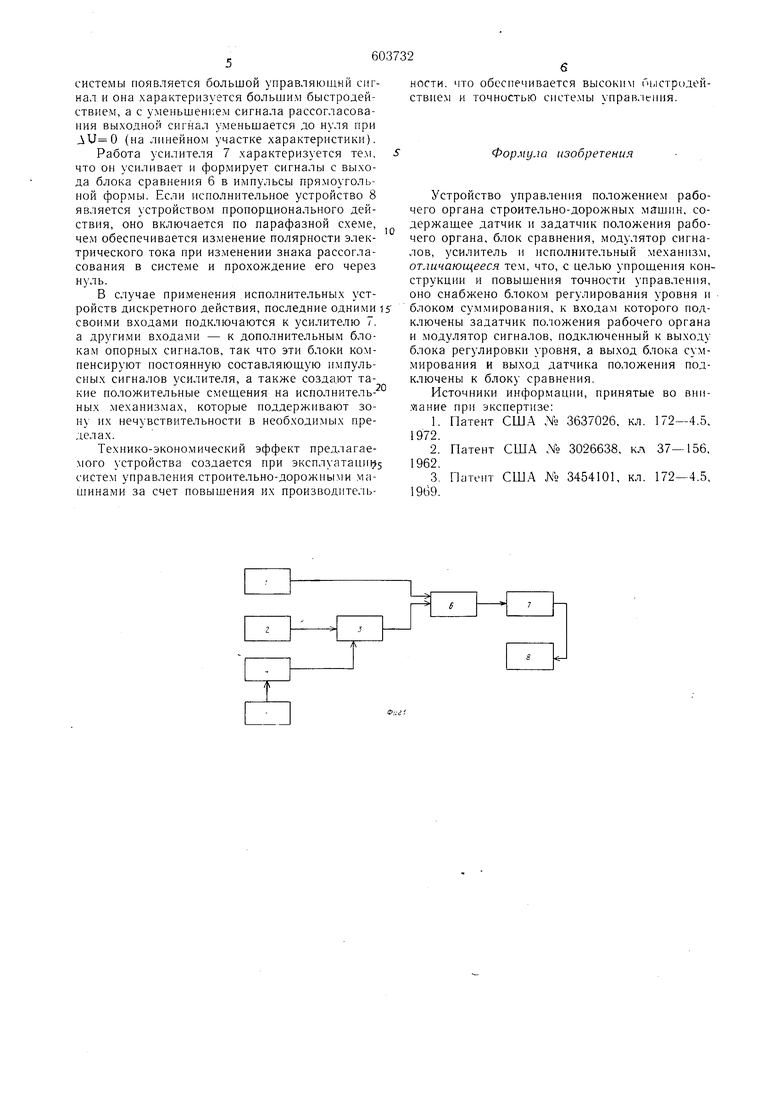
Ыа фнг. 1 изображена блок-схема устройстlia уиравлення; на фиг. 2 даны диаграммы сигналов устройства управления; на фиг. 3 статнчеекие характеристики устройства.
Устройство имеет датчнк 1 фактического положения рабочего органа, каковым может б1,|ть иотенцнометрическое, индуктивное, емкостное илн иное устройство, имеющее на в,1ходе нанряженне постоянного тока (После выпрямления и фильтрации в случае питания преобразователей неременным током) п изменяющее еигнал в соответствии с изменением положеппя коптролируемого объекта. Задатчик 2 необходимого положения рабочего органа может п.меть аналогнчный датчику илн иной преобразователь также с выходным напряже1Н1е.м поетоянного тока. Задатчик 2 подсоединен к одному входу блока суммирования 3, а к другому входу подключен модулятор 4, который нредетавляет собой генератор периодического линейно изменяющегося напряжения (пилообразного напряжения) В блоке суммнроваиня 3 сигнал модулятора 4 накладывается на сигiia.i задатчнка 2, т. е. .мируетея неременная составляющая сигнала модулятора н ноетоянная составляюн1ая снгнала задатчика, не изменяя ноеледней. К модулятору 4 подсоедииеп блок регулировки уровня линейно изменяющегоея нанряжения 5.
К блоку суммирования 3 подсоединены задатчик 2 н модулятор 4 (см. фиг. 1), но к нему быть подсоединены также датчик 1 н модулятор 4, что не меняет характера преобразовання сигналов и сущности изобретения.
Датчик, и блок суммирования 3 подсоединены к входам блока сравнения 6, каковым может быть любое быстродействующее устройство с высокой чувствительностью, например, выполненное на основе дифференциального уси,1нтеля. Блок сравнения соединен с усилителем 7, нодключеиным в свою очередь к исполнительному механизму.
В случае работы системы с нснолннтельными механнз.мами нронорционального действия уси/1ите,1Ь 7 имеет два выхода, сигналы от которых снимаются но нарафазной схеме для обесисчеиия нулевого сигнала на исиолнительном мехаинзме 8 ири равенетве снгиалов датчика и задатчика. При j)a6i)Te системы с нсиолнительными Mexaini3MaNHi дискретного действия выходы усилителя 7 соеднне}1Ы с двумя исполнительными механиз.мамн 8, к которым для обеснечения нулевого сигнала подсоединены блоки опорных напряжений с регуляторами чувствительности.
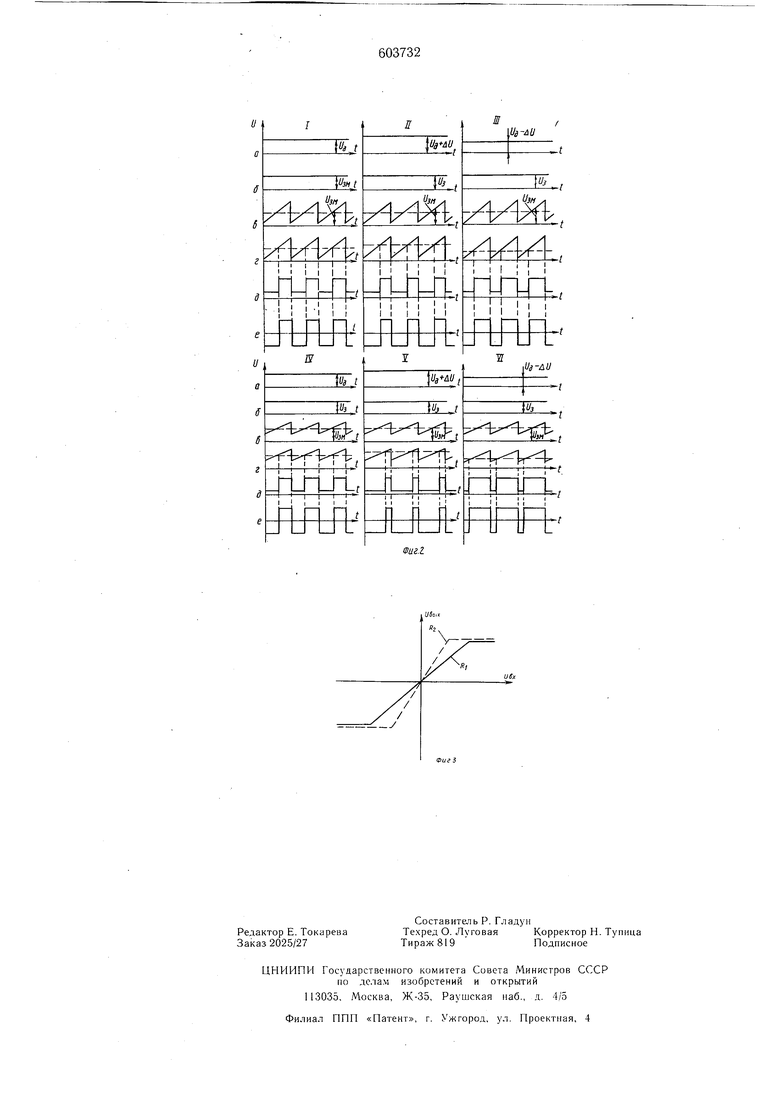
Работа устройства осуществляется в соответствии с диаграммами (см. фиг. 2) следующим образом. Уровни сигналов датчика 1 и задатчика 2 задаются неремепхением движков
потенциометров н иредставлены на днаграммах линиями «а и «б соответственно.
Уровни пилообразного напряжения модулятора 4 устанавливаются блоком регулировки уровня 5. На фиг. 2 представлены диаграммы с
5 высоким уровне.м линейно из.меняющегоея напряжения но амплитуде (низкой чувствительностью системы - диаграммы Г, Г Г, ТП), н низким уровнем линейно из.меняющегоея нанря жеиия (высокой чувствительностью систе.мы -
Q диагра.ммы IV, V и 1). Это напряжение в блоке сум.мирования 3 накладывается на наиряжение задатчика и представлено на диаграммах л ИНН я.ми «в.
На выходах блока сравнения 6 ноявляю ся напряжения (линии «г), нриче.м на днаг5 раммах 1 и IV изображены случаи равенства сигналов датчика и задатчика (постоянной составляющей), на диаграммах 11 и V - случаи преобладания сигнала датчика, а на диаграммах 111 и VI ;- случаи преобладания сигнала задатчика. Сигналы на выходе блока сравнения (линии «д) и на выходах усилителя, сннмае.мые но нарафазной схеме (линии «е) оказываются Н1иротно-модулированными, причем при равенстве сигналов датчика длительность импульсов оказывается равной длительности интервала между ними, а положительные или отрицательные приращения сигналов (например датчика) вызывают соответственно приращения д.чительности импульсов или паузы между ними.
Принцип управления чувствительностью иллюстрируется диаграммами 11, 111 и V, VI соответственно, из которых видно, что одинаковому по величине приращению сигнала датчика ди соответствуют (при разном угле наклона импульсов линейно изменяющегося напря5 жепия) различные прнращения длительностн импульсов. Управление чувствительностью за счет изменения угла наклона этих импульсов достигается изменением параметров блока регулирования уровня, в результате чего статическая характеристика системы приобретает
0 вид, изображенный на фиг. 3. При этом R 1 R;, в результате чего для Rj уменьщается крутизна и увеличивается дианазон линейностн статической характеристики.
Если ирнра ения сигнала датчика (или задатчика) ли превысит величину-, где «б - диапазон изменения но амплитуде линейно изменяющегося сигнала, модуляция прекращается и статическая характеристика нриобретает вид ,, ±1. Этим обеспечивается то преимупшство систем, при котором в случае боль0 щого сигнала рассогласования AU на выходе системы появляется большой управляющий сигнал и она характеризуется большим быстродействием, а с уменьшен1;ем сигнала рассогласования выходной сигнал уменьшается до нуля при (на линейном участке характеристики). Работа усилителя 7 характеризуется тем, что он усиливает и формирует сигналы с выхода блока сравнения 6 в имиульсы прямоугольной формы. Если исполнительное устройство 8 является устройство.м ироиорционального действия, оно включается ио парафазной схеме, че.м обеспечивается изменение полярности электрического тока при изменении знака рассогласования в системе и прохождение его через нуль. В случае применения исполнительных устройств дискретного действия, последние одними своими входами подключаются к усилителю 7. а другими входа.ми - к дополнительным блокам опорных сигналов, так что эти блоки компенсируют постоянную составляющую импульсных сигналов усилителя, а также создают такие положительные смещения на исполнительных механизмах, которые поддерживают зону их нечувствительности в необходимых пределах. Технико-экономический эффект предлагаемого устройства создается при эксплуатаии1; 5 систем управления строительно-дорожными машинами за счет повышения их производительнести, что обеспечивается высоким Г ыстридействие.м и точностью систе.мы управ.1ения. Формула изобретения Устройство управлеиия положением рабочего органа строительно-дорожных мзшин, содержащее датчик и задатчик положения рабочего органа, блок сравнения, модулятор сигналов, усилитель и исполнительный механизм, отличающееся тем, что, с целью упрощения конструкции и повышения точности управления, оно снабжено блоком регулирования уровня и блоком суммирования, к входам которого подключены задатчик положения рабочего органа и модулятор сигналов, подключенный к выходу блока регулировки уровня, а выход блока суммирования и выход датчика положения подключены к блоку сравнения. Источники информации, принятые во вни.«ание при экспертизе: 1.Патент СШ.Л № 3637026, кл. 172-4.5, 1972. 2.Патент США JMb 3026638, кл 37-156, 1962. 3.Патент США 3454101, кл. 172-4.5, 1969.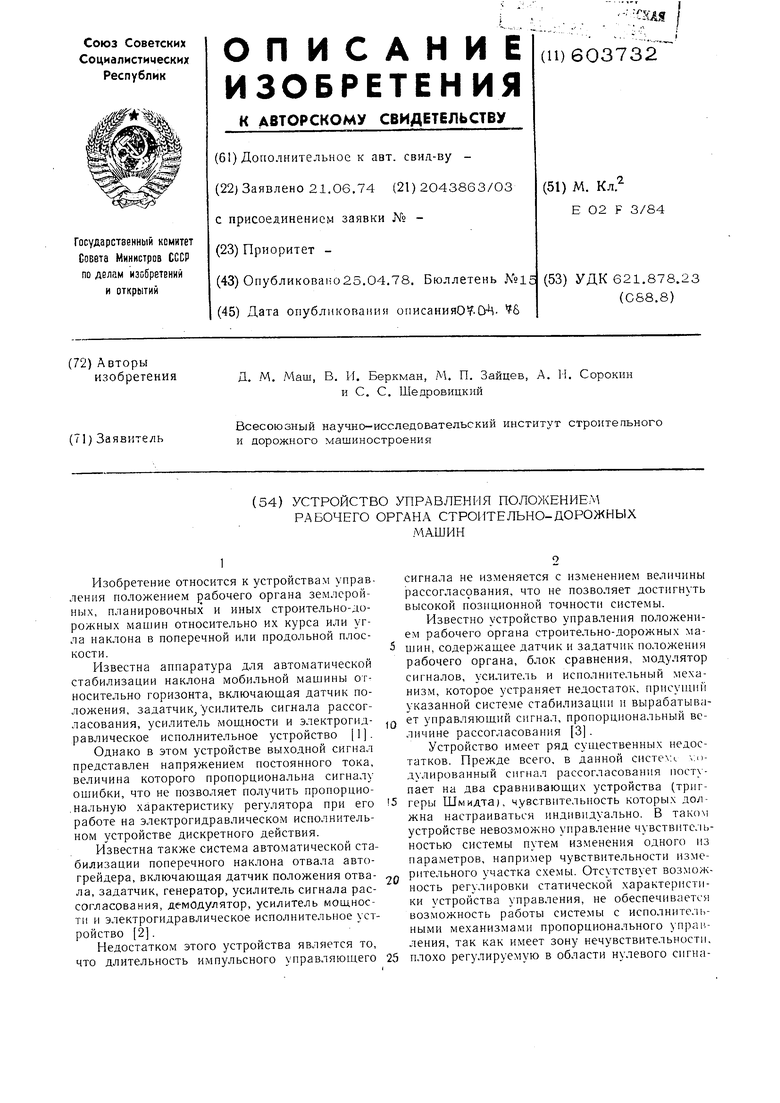
| название | год | авторы | номер документа |
|---|---|---|---|
| ЛАЗЕРНАЯ СИСТЕМА УПРАВЛЕНИЯ ДОРОЖНО-СТРОИТЕЛЬНОЙ МАШИНОЙ | 1994 |
|
RU2090707C1 |
| Система автоматического регулирования гранулометрического состава загрузки в мельницах самоизмельчения | 1984 |
|
SU1158239A1 |
| Устройство для стабилизации вакуума | 1983 |
|
SU1149060A1 |
| Устройство для широтно-импульсного управления электромагнитом | 1982 |
|
SU1084730A1 |
| Устройство управления рабочим органом землеройно-транспортной машины | 1985 |
|
SU1342981A1 |
| УСТРОЙСТВО СТАБИЛИЗАЦИИ ПОЛОЖЕНИЯ РАБОЧЕГО ОРГАНА СТРОИТЕЛЬНО-ДОРОЖНОЙ Л1АШИНЫ | 1972 |
|
SU420737A1 |
| Устройство для замораживания биоматериалов | 1989 |
|
SU1714309A1 |
| Следящая система | 1982 |
|
SU1081622A1 |
| Устройство для автоматической центрировки линз | 1982 |
|
SU1118882A1 |
| Устройство управления положением рабочего органа землеройно-транспортной машины | 1989 |
|
SU1647091A1 |