1
Изобретение относится к автоматическим системам стабилизапии рабочего органа автогрейдеров, бульдозеров, асфальтоукладчиков и других строительно-дорожных машин относительно заданной линии, плоскости и т. д.
Известны устройства стабилизации нолон ения рабочего органа строительно-дорожных машин, содержаш,ие датчик положения рабочего органа (маятниковый, пузырьковый, шариковый и так далее), задатчик, релейный блок сравнения, усилители и исполнительные механизмы.
Однако в условиях работы строительно-дорожных машин и воздействия на них внешних возмуш;ений постоянно возникают колебания маятника или иного чувствительного элемента относительно вертикали, вызывая срабатывание блока сравнения и попеременное срабатывание соответствующих исполнительных механизмов, что снижает надежность и долговечность устройства.
В случае применения фильтров, демпфирования маятника, введения цепей задержки сигнала от сравн1шаюн1,его устройства к псполннтельным механизмам ухудшаются динамические свойства этих систем. Целью изобретения является повышение динамических качеств и надежности устройства.
Это достигается тем, что к датчику положения рабочего органа через дифференцирующее
звено подключен дополнительный релейный блок сравнения с регулируемой чувствительностью, выход которого подключен к одному из входов логического блока сравнения, другим входом соединенного с основным релейным блоком сравнения. Выход логического блока сравнения подключен через усилители к исполнительным механизмам. Кроме того, с целью повышения точности
работы устройства логический блок сравнения выполнен со схемами совпадения, входы каждой из которых соединены с соответствующим выходом (ОСНОВНОГО релейного блока сравнения и через инвертор - с соответствующим выходом дополнительного релейного блока сравнения, а к выходам схем сравнения подключены блоки временных задержек.
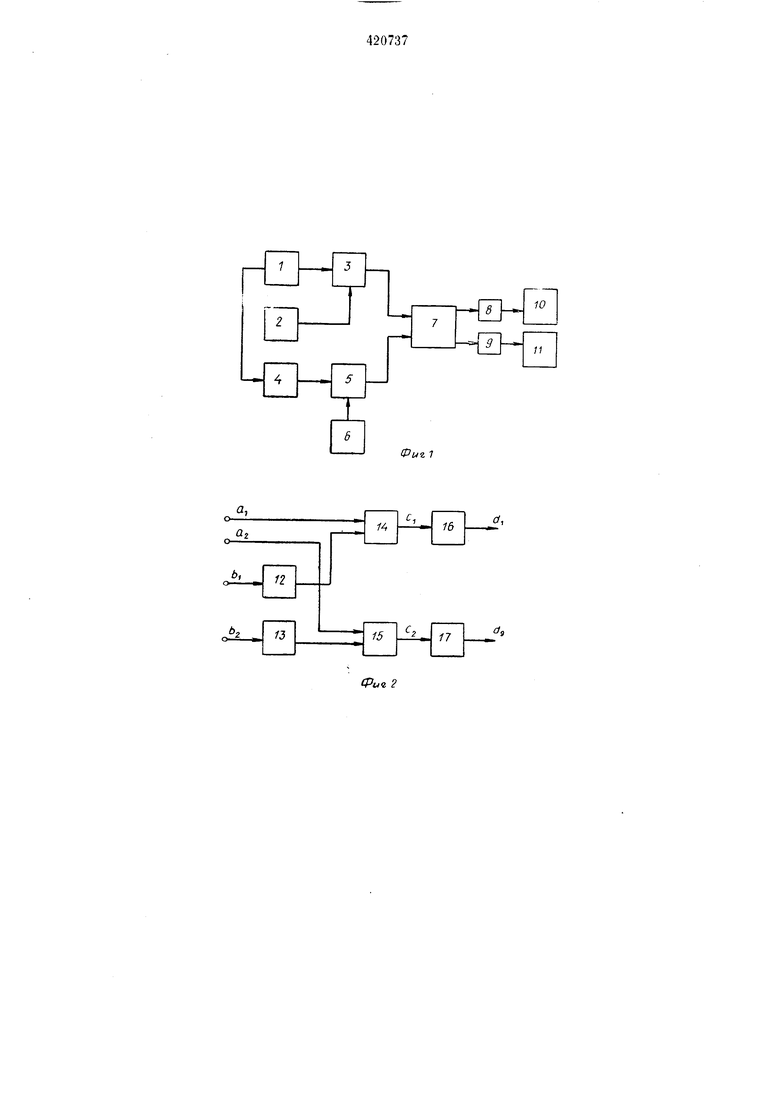
На фиг. 1 изображена блок-схема устройства стабилизацнн; на фиг. 2 - функциональная схема логнческого блока сравнения; на фиг. 3 и 4 - диаграммы работы устройства стабилизации при колебаниях маятника соответственно в случае отсутствия и нри наличии рассогласования между сиг11алом задатчика и
средним значением сигнала датчика.
Предлагаемое устройство содержит, датчик 1 положения рабочего органа и задатчик 2, соединенные с релейным блоком сравнения 3. К датчику через дифференцирующее звено 4
подключен донолнительный релейный блок
сравнения 5, аналогичны но нринцину ле ствия 3, ю отлича опц Йся от Г ослел1 его тем, что посредством устро ства регулирова1 ия б чувствительность блока 5 может изме ЯТЬСЯ.
Оба блока сравнения 3 и 5 соединен з с логичес им блоком 7, обеспечива1ОН,нм такое нреобразовапне , в результате которого а нз его выходов независимо от состояния датчиков (наличия или ОТСуТСТ15ИЯ колебаний) НОЯВЛЯ ОТСЯ
сигналы, зависяпще только от ноложения рабочего органа магнины. Блок 7 соединен с усилителями 8 и 9, к ОТОрЫМ iCполнительные устро 1ства 10 и II (нанример, для подъема и онускания отвала).
Логически блок сравне ия 7 содержит и 1верторы 12 и 13, схемы совпадения 14 и 15 и схемы 16 и 17, формиру ощие длитель ость унравляющнх сигналов.
Устройство стабилизации работает следующим образом.
При преобладании датчика над сигналом задатчика на из выходов релейного блока сравнения 3 появляется сигнал ai, а нри преобладании сигнала задатчика ia другом выходе - сигнал а. В пределах зоны нечувствительности релейного блока сравне ия 3 сигналы ui и uz отсутству}от.
При колебаниях на обоих выходах дополнительного релейного блока сравне ия 5 появляются сигналы bi и bz. Чувствительность блока 5 уста аБливается устройством 6 большей, чем чувствительность блока 3, в результате чего длительность сигналов 6i и 2 оказывается большей, чем длитель юсть сигналов а и az. Это илл острирует диаграмма, на которой изображе о появление сигналов в oz,iioro периода колебаний. За начало отсчета времени принято положение, соответствующее серединам зон нечувствительности блоков сравнения 3 и 5.
Принцип работы логического блока срав 1ения 7 описывается двумя уравнениями алгебры логики
Ci ---a,b,; С2 - .
где Ct и Cz сигналы на двух выходах блока 7. В соответствии с этими уравне иями, еслн имеют место колебания маятника относительно положения, соответству ощего заданному, то сигналы Ci и С2 отсутству от и исполнительных устройств не происходит.
Если в результате задатчика или измеиения ноложе ия рабочего органа машины, среднее з 1ачение сигнала датчика оказывается не равным , то при колеба иях маятника длительности сиг 1алов fli и а-,, неодинаковы. При этом ia из выходов блока 7 появляется сигнал Ci, тогда как другой сигнал (С2) отсутствует. При рассогласовании сигналов датчика и за датчика в противоиоложиую сторону ноявляется сигнал Са, а сигнал Ci отсутствует.
Для удобства управле 1ия иснол ительными механизмами импульсные сигналы блока 7 (Ci и Cz) увеличива отся по длительности схемами выдержек времени (сигналы d,, и dz) и после усиления усилителями 8 и 9 передаются на исполнительные меха 1измы.
Работа устройства стабилизации подчиняется приведенным выше логическим уравнениям
и в случае рассогласования сигналов датчика и задатчика, но при отсутствии колебаний маятника.
Предмет изобрете ия
1.Устройство стабилизации положения рабочего органа строитель ю-дорож ой машины, включа ощее датчик положения рабочего органа, задатчик, релейный блок сравнения, усилители и исполнительные механизмы, отличающееся тем, что, с повыше ия динамических качеств и надежности устройства, к датчику положения рабочего через
дифференцирующее звено подключен дополнительный релейный блок сравне ия с регулируемой чзвствительностью, выход которого подкл очен к одному из входов логического блока сравнения, други1М входом соединенного
с основным релейным блоком сравнения, а выход логического блока сравнения подключен через усилители к исполнительным механизм а м.
2.Устройство по и. 1, от л и ч а О щее с я те.м, что, с повыше1 ия работы
устройства, логический блок сравнения выполиен со схемами совнаде ия, входы каждой из которых соединены с соответству ощим выходом основного релейного блока сравнения и через инвертор - с соотБетству ощим выходом дополнительного релейного блока сравнения, а к выходам схем совпаде 1ия нодкл оче1 ы блоки времен ых задержек.
10
-П.
11
Фыг 1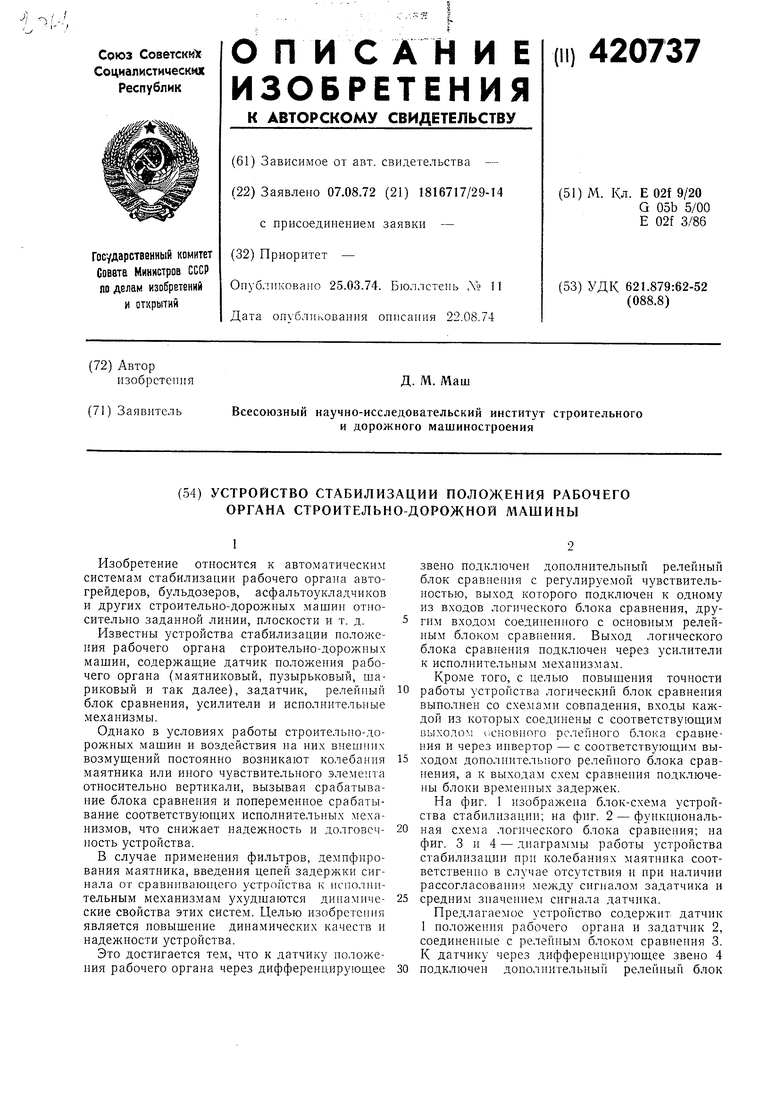

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство стабилизации положенияРАбОчЕгО ОРгАНА зЕМлЕРОйНыХ МАшиН | 1979 |
|
SU804791A1 |
| Управляющее устройство к землеройным машинам | 1978 |
|
SU754001A1 |
| Устройство управления рабочим органом землеройно-транспортной машины | 1985 |
|
SU1342981A1 |
| Регулятор нагрузки горной машины | 1983 |
|
SU1167325A1 |
| Устройство для автоматической стабилизации положения рабочего органа дорожно-строительных машин | 1979 |
|
SU883280A1 |
| Способ управления горной машиной и устройство для его осуществления | 1983 |
|
SU1105640A1 |
| Устройство для вождения колесного машинно-тракторного агрегата на рабочем гоне и поворотной полосе | 1980 |
|
SU934942A1 |
| УСТРОЙСТВО СТАБИЛИЗАЦИИ, УСКОРЕННОГО ВОССТАНОВЛЕНИЯ И КОНТРОЛЯ СИЛОВОЙ ГИРОСКОПИЧЕСКОЙ ВЕРТИКАЛИ | 2000 |
|
RU2172934C1 |
| Устройство для автоматического управления рабочим органом землеройно-транспортной машины | 1986 |
|
SU1420126A1 |
| Устройство управления положением рабочего органа строительно-дорожных машин | 1974 |
|
SU603732A1 |
а,
Ь,
