1
Изобретение относится к области автоматики и. может быть использовано для управления реверсивными электроприводами подъемно-транспортных машин с целью получения точных конечных положений исполнительного органа.
Известны устройства для управления реверсивными электроприводами, содержащие триггеры, элементы И, ИЛИ, усилители, датчики конечного положения объекта управления и магнитные пускатели 1, 2.
Из известных устройств для управления исполнительным органом наиболее близким по технической сущности является устройство для управления реверсивным электроприводом, содержащее первый датчик конечного положения исполнительного органа, выход которого подключен к первому входу первого элемента И и через первый элемент НЕ - к первым входам второго и третьего элементов И, второй датчик конечного положения исполнительного органа, выход которого соединен с первым входом четвертого элемента И и через второй элемент НЕ - со вторыми входами второго и третьего элементов И, вторые входы первого и четвертого элементов И подключены соответственно к первому и второму входам устройства, выходы первого и второго -),лементов Иподключены к первому н второму входам первого элемента , выходы третьего и четвертого элементов И - соответствен но к первому и второму входам второго элемента ИЛИ, к выходам первого и второго з.:о ментов ИЛИ подключены соответственно пепвый и второй усилители 3.
Целью изобретения является повышение надежности устройства в работе.
Это достигается тем, что в известное устройство дополнительно введены третий элемент НЕ и датчик направления вращения, выход которого соединен с третьим входом второго элемента И и через третий элемент НЬ, - с третьим входом третьего элемента И.
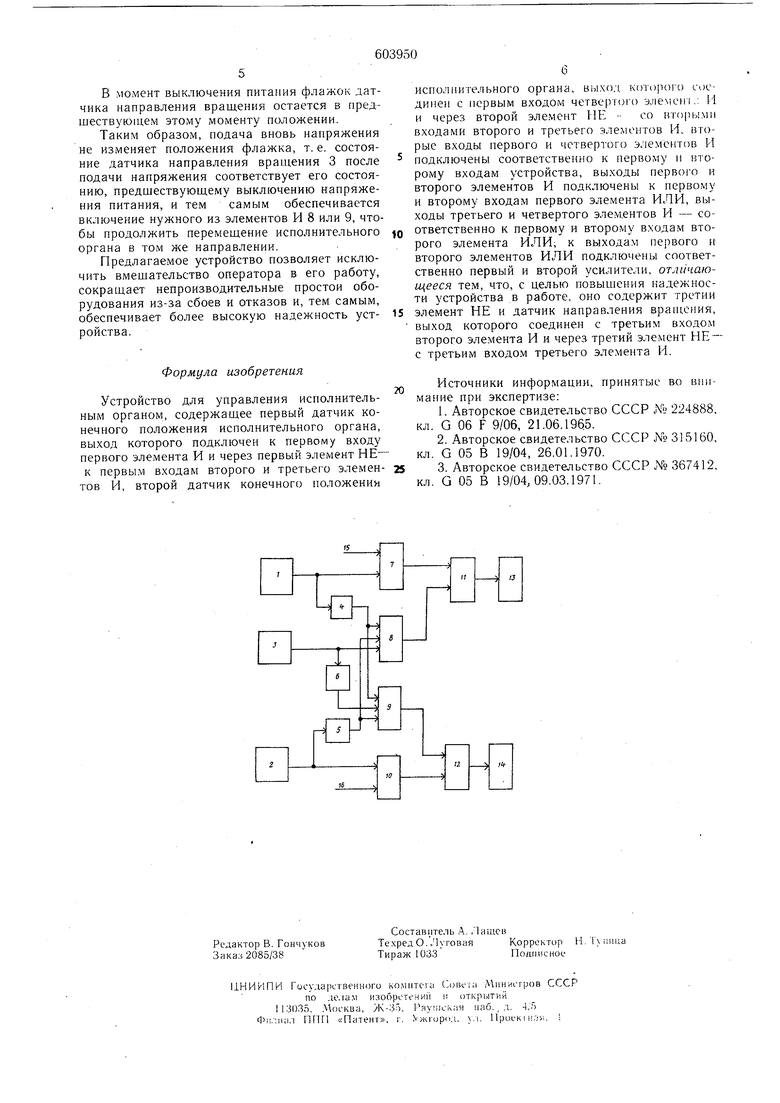
На чертеже представлена структурная схема устройства для управления допо.1нительным органом.
Оно содержит первый и второй 2 датчики конечного положения исполнительного органа, датчик 3 направления вращения, первый, второй, третий элементы НЕ 4-6, первый, второй, третий, четвертый элементы И 7-10, первый и второй элементы ИЛИ 11 и 12, первый и второй усилители 13 и 14, первый и второй входы устройства 15 и 16.
Выход первого датчика 1 конечного положения исполнительного органа подключен к первому входу первого элемента И 7, а через первый элемент НЕ 4 - к первым входам второго и третьего элементов И 8 и 9.
Выход второго датчика 2 конечного положения исполнительного органа подключен к первому входу четвертого элемента И 10, а через второй элемент НЕ 5 - ко вторым входам второго и третьего элементов И 8 и 9.
Выход датчика 3 направления вращения, представляющего собой бесконтактный конечный выключатель, флажок которого связан с выходным валом электродвигателя за счет силь1 трения, подключен к третьему входу второго элемента И 8, а через третий элемент НЕ 6 - к третьему входу третьего элемента И 9.
Вторые входы первого и четвертого элементов И 7, 10 подключены соответственно к первому и второму входам устройства 15 и 16, служащим для подачи на устройства соответственно команд «прямо и «реверс.
Выходы первого и второго элементов И 7, 8 подключены соответственно к первому и второму входам первого элемента ИЛИ 11, выход которого подключен ко входу первого усилителя 13, служащего для выдачи на исполнительный орган команды «прямо.
Выходы третьего и четвертого элементов И 9, 10 подключены соответственно к первому и второму входам второго элемента ИЛИ 12, выход которого подключен ко входу второго усилителя 14.
Устройство работает следующим образом.
В исходном состоянии исполнительный орган находится в одном из конечных положений, т. е. включен один из датчиков, например первый датчик конечного положения. Сигнал с выхода датчика 1. подготавливает к включению элемент И 7, а через элемент НЕ 4 блокирует элементы И 8 и 9. Сигнал с выхода выключенного датчика 2 блокирует элемент И 10. При подаче на первый вход устройства 15 команды «прямо срабатывает элемент И 7, сигнал с выхода которого через элемент ИЛИ 11 включает усилитель 13, который выдает на исполнительный орган команду «пря.мо, обеспечивая включение его электродвигателя в направлении «прямо.
Вращение электродвигателя в направлении «прямо обусловливает включение датчика 3 направления вращения, т. е. флажок, связанный с выходным валом электродвигателя исполнительного органа за счет силы трения, входит Б бесконтактный выключатель датчика и удерживается в нем, таким образом поддерживается включенное состояние датчика направления врап1ения.
Сигнал с выхода включенного датчика направления вращения 3 подготавливает к включению элемент И 8, а через элемент НЕ 6 блокирует элемент И 9.
При перемещении исполнительного органа включается датчик 1, обеспечивая через элемент НЕ 4 снятие блокировочного сигнала со входа элемента И 8, который срабатывает, и сигнал с его выхода через элемент ИЛИ 11
поддерживает включенное состояние усилителя 13.
При подходе исполнительного органа ко второму конечному положению включается датчик 2, сигнал с выхода которого через элемент НЕ 5 блокирует элемент И 8, тем самым обеспечивая через указанные выше связи выключение усилителя 13, т.е. снятие с исполнительного органа команды «прямо, что приводит -к прекращению его перемещения. 0 Включенный второй датчик конечного положения 2 подготавливает к включению элемент И 10, а через элемент НЕ 5 блокирует элементы И 8, 9.
Перемещение исполнительного органа из второго конечного положения начинается с 5 подачей на второй вход устройства 16 команды «реверс, обеспечивая срабатывание элемента И 10, сигнал с выхода которого через элемент ИЛИ 12 включает усилитель 14, который выдает на исполнительный орган команду «реверс, обеспечивая включение его электродвигателя в направлении «реверс.
Вращение электродвигателя в направлении «реверс обуславливает выключение датчика направления вращения 3, так как флажок за счет силы трения выходит из бесконтактного 5 выключателя датчика и удерживается в этом положении, таким образом поддерживая выключенное состояние датчика направления вращения.
Сигнал с выхода выключенного датчика 3 блокирует элемент И 8, а через элемент НЕ 6 снимает сигнал блокировки элемента И 9.
При перемещении исполнительного органа выключается датчик 2, обеспечивая через элемент НЕ 5 снятие блокировочного сигнала со входа элемента И 9, который срабатывает и 5 сигнал с его выхода через элемент ИЛИ 12 поддерживает включенное состояние усилителя 14.
При подходе исполнительного органа к первому конечному положению включ-ается датчик 1, сигнал с выхода которого через элемент НЕ 4 блокирует элемент И 9, тем самым обеспечивая через указанные выще связи выключение усилителя 14, т. е. снятие с исполнительного органа команды «реверс, что приводит к прекращению его перемещения.
Рассмотрим вариант, когда при на.хождении исполнительного органа в промежуточной точке траектории перемещения (выключены дат.чики конечных положений 1 и 2) происходит выключение питания. В этом случае при возобновлении подачи напряжения исполнительный орган будет продолжать перемен1ение в том же направлении, что и до выключения питания. Это свойство обусловлено наличием датчика направления вращения 3.
При нахождении исполнительного органа в промежуточной точке траектории сигналы с выходов выключенных датчиков 1. 2 блокируют соответственно элементы И 7. 10, а через элементы НЕ4, 5подготавливаютжлючение элементов И 8, 9. В момент выключения питания флажок датчика направления вращения остается в предшествуюн1,ем это.му моменту положении. Таким образом, подача вновь напряжения не изменяет положения флажка, т. е. состояние датчика направления вращения 3 после подачи напряжения соответствует его состоянию, предществующему выключению напряжения питания, и тем самым обеспечивается включение нужного из элементов И 8 или 9, чтобы продолжить перемещение исполнительного органа в том же направлении. Предлагаемое устройство позволяет исключить вмещательство оператора в его работу, сокращает непроизводительные простои оборудования из-за сбоев и отказов и, тем самым, обеспечивает более высокую надежность устройства. Формула изобретения Устройство для управления исполнительным органом, содержащее первый датчик конечного положения исполнительного органа, выход которого подключен к первому входу первого элемента И и через первый элемент НЕ к первы.м входам второго и третьего элементов И, второй датчик конечного положении нсполпительного органа, выход ()го cot динен с первым входом четвертого элемеш.. И и через второй элемент НЕ - со вторыми входами второго и третьего элементов И. ггорые входы первого и четвертого элементов И подключены соответственно к первому и второму входам устройства, выходы первого и второго элементов И подключены к первому и второму входам первого элемента ИЛИ, выходы третьего и четвертого элементов И - соответственно к первому и второму входам второго элемента ИЛИ, к выходам первого и второго элементов ИЛИ подключены соответственно первый и второй усилители, отличающееся тем, что, с целью повыщения надежности устройства ,в работе, оно содержит третий элемент НЕ и датчик направления вращения, выход которого соединен с третьим входом второго элемента И и через третий элемент НЕ - с третьим входом третьего элемента И. Источники информации, принятые во вппмание при экспертизе: 1.Авторское свидетельство СССР Ai. 224888, кл. G 06 F 9/06, 21.06.1965. 2.Авторское свидетельство СССР № 315160, кл. G 05 В 19/04, 26.01.1970. 3. Авторское свидетельство СССР № 367412. кл. G 05 В 19/04,09.03.1971.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления реверсивным электроприводом | 1976 |
|
SU675401A1 |
| Устройство для управления реверсивным электроприводом | 1975 |
|
SU699489A1 |
| Устройство для управления реверсивным электроприводом | 1974 |
|
SU540257A1 |
| ГИДРАВЛИЧЕСКАЯ СИСТЕМА РЕГУЛИРОВАНИЯ УГЛА УСТАНОВКИ ЛОПАСТЕЙ ВЕТРОТУРБИНЫ | 2015 |
|
RU2605490C2 |
| Устройство для управления исполнительным органом | 1982 |
|
SU1149217A1 |
| КОМБИНИРОВАННЫЙ ПОЧВООБРАБАТЫВАЮЩИЙ АГРЕГАТ | 2005 |
|
RU2295216C1 |
| Устройство для программного управления самоходной машиной | 1981 |
|
SU1008700A1 |
| Устройство для токовой защиты трехфазных цепей с зависимой выдержкой времени | 1985 |
|
SU1277279A1 |
| СИСТЕМА ПРОГРАММНОГО УПРАВЛЕНИЯ СБОРОЧНЫМ УСТРОЙСТВОМ | 1991 |
|
RU2029335C1 |
| Устройство для ориентации деталей | 1986 |
|
SU1399064A2 |
