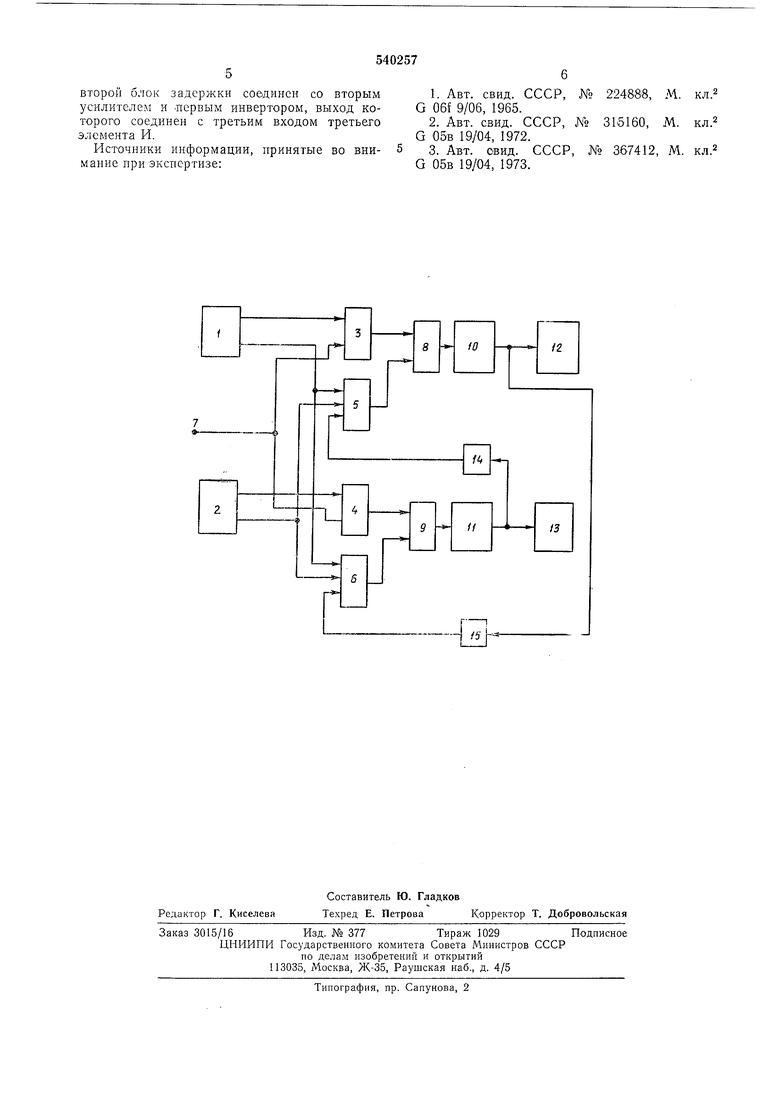
Изобретение относится к автоматическому управлению подъемио-транспортными машинами и может быть использовано для управления реверсивными электроприводами для получения точных конечных положений объекта управления. Известны устройства для управления реверсивными электроприводами, содержащие триггеры, элементы И, ИЛИ, усилители, датчики конечного Положения объекта управления и магнитные пускатели 1, 2. Из известных устройств управления реверсивным электроприводом наиболее близким по технической сущности к предлагаемому является устройство, содержащее первый и второй датчики конечного положения объекта управления, прямые выходы которых соединены с Первыми входами соответственно -первого и второго элементов И, вторые входы которых соединены с шиной запуска, третий и четвертый элементы И, первый и второй элементы ИЛИ, первый и второй блоки задержки, -первый и второй инверторы и первый и второй усилители 3. Наличие в известных устройствах триггеров в качестве элементов памяти на.прявления перемещения снижает надежность устройства. Кроме того, -в случае сбоя известные устройства не имеют возможности обеспечить самостоятельное возвращение объекта управления в одно из крайних положений без вмешательства оператора. Цель изобретения - повышение надежности устройства. Поставленная цель достигается тем, что инверсные выходы датчиков конечного положения объекта управления соединены с соответствующими входами третьего и четвертого элементов И, входы первого элемента ИЛИ соединены с выходами первого и третьего элементов И, а выход через первый блок задержки соединен с входами первого усилителя и второго инвертора, выход которого соединен с третьим входом четвертого элемента И, выход которого соединен с одним из входов второго элемента ИЛИ, другой вход которого соединен с выходом второго элемента И, а выход через второй -блок задержки соединен со вторым усилителем и первым инвертором, выход которого соединен с третьим входом третьего элемента И. На чертеже представлена блок-схема устройства для управления реверсивным электроприводом. Устройство содержит первый 1 и второй 2 датчики конечного положения объекта управления, первый 3, второй 4, третий 5, четвертый 6 элементы И, щину запуска 7, первый 8 и второй 9 элементы ИЛИ, первый 10 и второй 11 блоки задержки, первый 12 и второй 13 усилители, первый 14 и второй 15 инверторы. Устройство работает следующим образом. В начальный момент объект управления находится в одном из конечных положений, т. е. включен один из датчиков, например первый датчик 1. Сигнал с прямого выхода датчика 1 подготавливает к включению элемент И 3, а сигнал с инверСНото выхода блокирует элементы И 5 и 6. Сигнал с прямого выхода второго датчика 2, который в данный момент выключен, блокирует элемент И 4, а сигнал с инверсно-го выхода поступает на вторые входы элементов И 5 и 6 как разрешающий. С приходом запускающего сигнала «Запуск по шнпо 7 элемент И 3 срабатывает и сигнал с его выхода через элемент ИЛИ 8 поступает на вход первого блока задержки 10, и через некоторое время (время отра ботки блока задержки 10) сигнал с выхода блока задержки 10 включает первый усилитель 12, а через второй инвертор 15 блокирует элемент И 6. По мере продвижения объекта управления первый датчик 1 выключается, и сигналы с инверсных выходов выключенных датчиков 1 и 2 конечного положения при отсутствии блокировочного сигнала с выхода инвертора 14 (при отсутствии команды «Реверс) включают элемент И 5, сигнал с выхода которого через элемент ИЛИ 8, блок задержки ГО поддёрживает на выходе усилителя 12 команду «Прямо. При переходе объекта управления во второе конечное положение срабатывает датчик 2, сигнал с прямого выхода KOTOpoiro поступает на вход элемента И 4 как разрешающий, а сигнал с инверсного выхода выключает элемент И 5 и блокирует включение элемента И 6. Выключение элемента И 5 приводит к снятию сигнала с входа усилителя 12 и к снятию сигнала блокировки с выхода инвертора 15. С приходом по шине 7 запускающего сигнала «Запуск на вход элемента И 4 последний срабатывает, и сигнал с его выхода через элемент ИЛИ 9 поступает на вход второго блока задержки 11, и через некоторое время (время отработки блока задержки 11) сигнал с выхода блока задержки 11 включает (второй усилитель 13, а через первый инвертор ,14 блокирует включение элемента И 5. По мере нродвил ения объекта управления выключается датчик 2 конечного положения, и сигналы с инверсных выходов выключенных датчи-ков 1 и 2 при отсутствии блокировочного сигнала с выхода инвертора 15 включают элемент И 6, сигнал с выхода которого через элемент ИЛИ 9, блок задержки 11 поддерживает на выходе усилителя 13 команду «Реверс. С приходом объекта управления в первое конечное положение срабатывает датчик 1, сигнал с инверсного выхода которого выключает элемент И 6 и тем самым по описанным выще цепям снимает сигнал со входа усилителя 13. Рассмотрим вариант, когда в случае -сбоя объект управления оказался в положении, при котором «выключены датчики 1 и 2. В этом случае сигналы с инверсных выходов выключенных датчиков 1 и 2 включают элементы И 5 и 6 (при отсутствии сигналов блокировок с выходов инверторов 14 и 15). Сигналы с выходов элементов И 5 и 6 через соответствующие элементы ИЛИ -8 и 9 поступают на входы блоков задержки 10 и М. Пусть, например, время задержки блока 10 больше, чем блока И, тогда сигнал на выходе блока задержки 11, появивщись раньше, чем на выходе блока задержки 10, включает усилитель 13 команды реверс, а через инвертор 14 блокирует включение элемента И 5, который через элемент ИЛИ 8 снимает сигнал .с входа блока задержки 10, который так и не отработал. Таким образом, введение блоков задержки 10 и 11 позволяет осуществлять возврат в одно из конечных положений объекта унравления в случае сбоя или какой-либо другой причины (например, в случае первоначального включения питания). В случае равенства времени задержек блоков 10 и И, если объект управления находится IB нейтральном положении (датчики конечных положений 1 и 2 выключены), то в случае сбоя или включения напряжения питания схема может выдать любую (только одну) команду 1«Прямо или «Ревер.с, что определяется конкретным ностроением схемы. Таким образом, предлагаемое устройство позволяет исключить вмешательство оператора в его работу, сокращает непроизводительные простои объекта управления из-за сбоев и отказов и тем самым обеспечивает увеличение помехозащищенности устройства. Формула изобретения У.стройство для управления реверсивным электроприводом, содержащее первый и второй датчики конечного положения объекта управления, прямые выходы которых соединены с первыми входами соответственно первого и второго элементов И, вторые входы которых соединены -с шиной запуска, третий и четвертый элементы И, первый и второй элементы ИЛИ, первый и второй блоки задержки, первый и второй инверторы и первый и второй усилители, отличающееся тем, что, с целью повышения надежности устройства, в нем инверсные выходы датчиков конечного положения объекта управления соединены с соответствующими входами третьего и четвертого элементов И, входы первого элемента ИЛИ соединены с выходами первого и третьего элементов И, а выход через первый блок задержки соединен с входами первого усилителя и второго ипвертора, выход которого соединен с третьим входом четвертого элемента И, выход которого соединен с одним из входов второго элемента ИЛИ, другой вход которого соединен с выходом второго элемента И, а выход через
второы О.ЧОК задержки соединен со вторым усилителем и .первым инвертором, выход которого соединен с третьим входом третьего элемента И.
Источники информации, принятые во внимание при экспертизе:
1.Авт. свид. СССР, № , Л1. G 06{ 9/06, 1965.
2.Авт. свид. СССР, № 315160, М. G 05в 19/04, 1972.
3.Авт. овид. СССР, № 367412, М. G 05в 19/04, 1973.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления реверсивным электроприводом | 1976 |
|
SU675401A1 |
| Устройство для управления реверсивным электроприводом | 1991 |
|
SU1833840A1 |
| Устройство для управления реверсивным электроприводом | 1978 |
|
SU767706A1 |
| Устройство для управления реверсивным электроприводом | 1975 |
|
SU699489A1 |
| Электропривод постоянного тока | 1990 |
|
SU1741247A1 |
| Устройство для управления исполнительным органом | 1974 |
|
SU603950A1 |
| Устройство для управления реверсивным электроприводом | 1981 |
|
SU993209A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ШАГОВЫМ ДВИГАТЕЛЕМ | 1997 |
|
RU2125762C1 |
| Устройство для регулирования температуры | 1986 |
|
SU1403025A1 |
| Цифровой электропривод | 1983 |
|
SU1102002A1 |
