Устройство работает следующим образом.
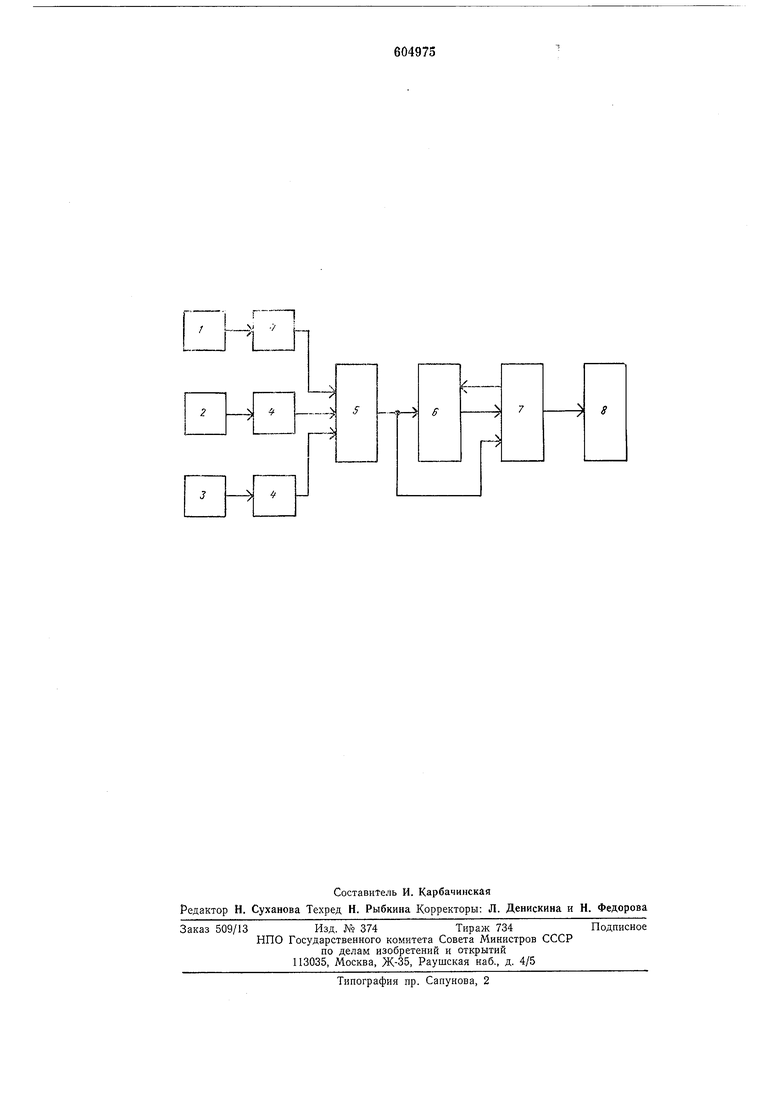
Непрерывные сигналы с датчика 1 азимутального угла, датчика 3 наклонной глубины, датчика 2 угла наклона преобразуются с помощью аналого-цифровых преобразователей 4 в цифровой код и поступают в блок 5 пересчета координат. В последнем производится пересчет поступивших значений в декартовы координаты очередной точки траектории скважины согласно соотношениям
А Д/i sin PJ cos а;; t i
Y- 2 A/i-Sln i-Sina ;
1 1
/y д/.cosp,.
где X, У, H - декартовы координаты очередной точки траектории;
«i - азимутальный угол в i точке траектории;
Рг - угол наклона в / точке траектории;
А/г - приращение наклонной глубины между i-1 и / точками.
Полученные координаты поступают для запоминания на первые входы анализатора 7 координат ц запоминающего блока 6. В запоминающем блоке 6 хранятся координаты точек траекторий ранее пробуренных скважин и накапливаются координаты буримой скважины. При поступлении координат очередной точки траектории скважины анализатор координат вырабатывает последовательность адресов, которая подается на второй вход запоминающего блока 6. По этим адресам из запоминающего блока 6 выбираются числовые значения координат точек ранее пробуренных скважин, которые принимаются на второй вход анализатора координат 7. В процессе перебора координат точек ранее пробуренных скважин вычисляются расстояния до очередной точки, координаты которой поступили на первый вход анализатора 7 координат. При этом в каждой траектории ранее пробуренной скважины находится точка, наиболее близкая к очередной. Значения координат наиближайших точек ранее пробуренных скважин, а также вычисленные величины расстояний до очередной точки передаются со вторых выходов анализатора 7 координат на входы блока 8 регистрации информации, выполненного на электронно-лучевой трубке. На экране блока 8 регистрации информации в масштабе экрана отображается очередная точка траектории буримой скважины и наиболее близкие к ней точки стволов ранее пробуренных скважин, а также числовые значения «оординат очередной точки и расстояний между очередной точкой и наиболее близкими точками траекторий. По изображению, сформированному на экране блока 8 регистрации информации, оператор имеет возможность оперативно определить взаимное положение очередной точки траектории скважины и ранее пробуренных скважин и, если расстояние между ними становится меньше допустимого, принять меры для предотвращения аварии.
Применение данного устройства позволяет значительно повысить качество и скорость контроля положения забоя в пространстве в процессе бурения и позволяет оперативно
контролировать положение забоя относительно стволов ранее пробуренных скважин, тем самым предупредить аварийные ситуации, возникающие .при пересечении стволов скважин.
j
Формула изооретения
Устройство контроля положения забоя, содержащее датчик азимутального угла, датчик угла наклона, датчик наклонной глубины,
подключенные к входам аналого-цифровых преобразователей, запоминающий блок, блок регистрации информации, отличающееся тем, что, с целью оперативного предупреждения пересечения стволов скважин, оно снабжено блоком пересчета координат д анализатором координат, причем входы блока пересчета -координат подключены к выходам аналого-цифровых преобразователей, а выходы-к первым входам анализатора координат
и к первым входам запоминающего блока, вторые входы которого соединены с первыми выходами анализатора координат, а выходы- с вторыми входами анализатора координат, выходы которого подключены к блоку
регистрации информации.
Источники информации, принятые во внимание при экспертизе
1.Куликовский Л. Ф., Ушмаев В. И. Информационно-измерительные системы для управлепия процессом бурения. М., изд. «Недра, 1972, с. 80-81.
2.Телеметрическая система СТЭ для контроля пространственного положения скважины в процессе бурения. Проспект. М., издание
Лицензторга, 1975.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство контроля положения забоя | 1976 |
|
SU746094A2 |
| Устройство для контроля положения забоя | 1987 |
|
SU1439223A1 |
| Устройство для контроля положения забоя | 1991 |
|
SU1816856A1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ПОЛОЖЕНИЯ ЗАБОЯ | 1994 |
|
RU2092791C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ПОЛОЖЕНИЯ ЗАБОЯ | 1994 |
|
RU2089854C1 |
| СПОСОБ И КОМПЬЮТЕРНАЯ СИСТЕМА ДЛЯ ПРОЕКТИРОВАНИЯ РАЗМЕЩЕНИЯ КУСТОВЫХ ПЛОЩАДОК НА МЕСТОРОЖДЕНИИ | 2017 |
|
RU2685005C1 |
| СИСТЕМА И СПОСОБ КОРРЕКЦИИ НАПРАВЛЕНИЯ СТВОЛА СКВАЖИНЫ НА ОСНОВЕ ПОЛЯ НАПРЯЖЕНИЙ | 2008 |
|
RU2496003C2 |
| СПОСОБ И СИСТЕМА КОМБИНИРОВАННОГО СОПРОВОЖДЕНИЯ ПРОЦЕССА БУРЕНИЯ СКВАЖИНЫ | 2018 |
|
RU2687668C1 |
| Система автоматизированного управления процессом бурения скважин | 2022 |
|
RU2790633C1 |
| СИСТЕМА ОПРЕДЕЛЕНИЯ КООРДИНАТ ТРАССЫ ПОДЗЕМНОГО ТРУБОПРОВОДА | 2001 |
|
RU2197714C1 |