гидроблоки неподвижно закреплены на передних стенках 11 агрегата с помощью кронштейнов 12. Со штоком гндродомкрата 2 соеднлен полззн 13, установленный в направля1ош,ей передней стенке, к которому крепятся опорные муфты 6. На ползуне и передней стенке имеются соответственно шкала 14 вертикальных перемеш,ений и указатель 15 положения. Кривошип тягой 16 и приводным рычагом 17 связан с кронштейном 18, жестко закрепленным на ползуне 13. Связь плунжера следящего гидроблока с приводным рычагом осуществляется толкателем 19. Для крепления толкателя приводной рычаг имеет продольный паз 20, а точка крепления толкателя делят рычаг по длине на два пропорциональных участка БВ .и ВГ, соотношение .которых определяет точность и диапазон настройки устройства. Подвод жидкости к гидроблоку осуществляется по жесткому шлангу 21, а к исполнительному домкрату - гибким шлангом 22.
При монтаже агрегата резцы устанавливаются по линиям резания, при этом с помощью гидродомкрата 2 исполнительный орган 5 с нижними резцами 23 выставляется так, чтобы резцы находились на уровне подошвы става 1. В этом положепии производится фиксация всех элементов устройства с помощью рукоятки 9 кривошипов и зубчатого сектора 10, а указатели 15 устанавливаются па нулевых делениях ш,калы 14. При изменении гипсометрии почвы пласта на отдельных секциях крепи производится корректировка положения кареток с нижними резцами относительно подошвы става. С этой целью соответственно величине изменения гипсометрии мепяют положение кривошипов 8. Например, при необходимости поднять резцы 23 кривошип 8 поворачивают вниз.
При этом тяга 16 опускается и поворачивает приводной рычаг 17 относительно точки соединения его с кронштейном 18 (точка Б). Точка Г (соединение тяги с приводным рычагом.) опускается в положение PI, а точка В (соединение толкателя 19 с приводными рычагами) - в положение BI. В связи с перемещением толкателя 19 следящего блока 3 на величину BBi в гидродомкрат 2 подается рабочая жидкоеть и происходит подъем ползуна 13 с направляюииьми 4 и резном 23 на новую линию резания.
Вместе с ползуном подн-имается кронштейн
18, поворачивая приводной рычаг 17 относительно точки FI- Подъем осуществляется до тех пор, пока точка, .крепления толкателя 19 к рычагу снова пе вернется из положения Bj Б положение В, и прекратится подача жидкоети, при этом точка Б переместится в положение БЬ
Отрезки ГГ, BBi и bbi строго пропорциональны друг другу, так как являются сторонами подобных треугольников. Отношение
между ними зависит от соотношения отрезков БВ и ВГ, на которые делит приводной рычаг точка крепления толкателя. Изменяя соотношение этих отрезков можно менять отношение отрезков .FFi и ББх, т. е. менять точность работы устройства и его диапазон. При смещении точки В к точке Б по продольному пазу 20 диапазон настройки устройства уменьщается, но возрастает точность. При значительном изменении гипсометрии пласта точку В смещают к точке F « быстро выводят агрегат в новое полол ение согласно гипсометрии. В дальнейшем, а при слабом изменении гипсометрии, точку В смещают к точке Б, увеличивая точность работы устройства при малых колебаниях изменений по вертикали.
Формула изобретения
Устройство для управления исполнительными органами угледобывающих агрегатов в вертикальной плоскости, включающее став, гидроцили.ндры управления с ползупами, о.порные направляющие, следящие гидроблоки и механизмы управления, содержащие торсионный вал, кривощипы, тяги и приводные рычаги, отличающееся тем, что, с целью повышения точности настройки агрегата по почве пласта, следящие гидроблоки механизма управления за.креплены неподвижно и соединены толкателями с приводными рычагами, каждый из -которых выполнен с пазом под узел соединения с толкателем и связан с ползуном посредством кронштейна.
16
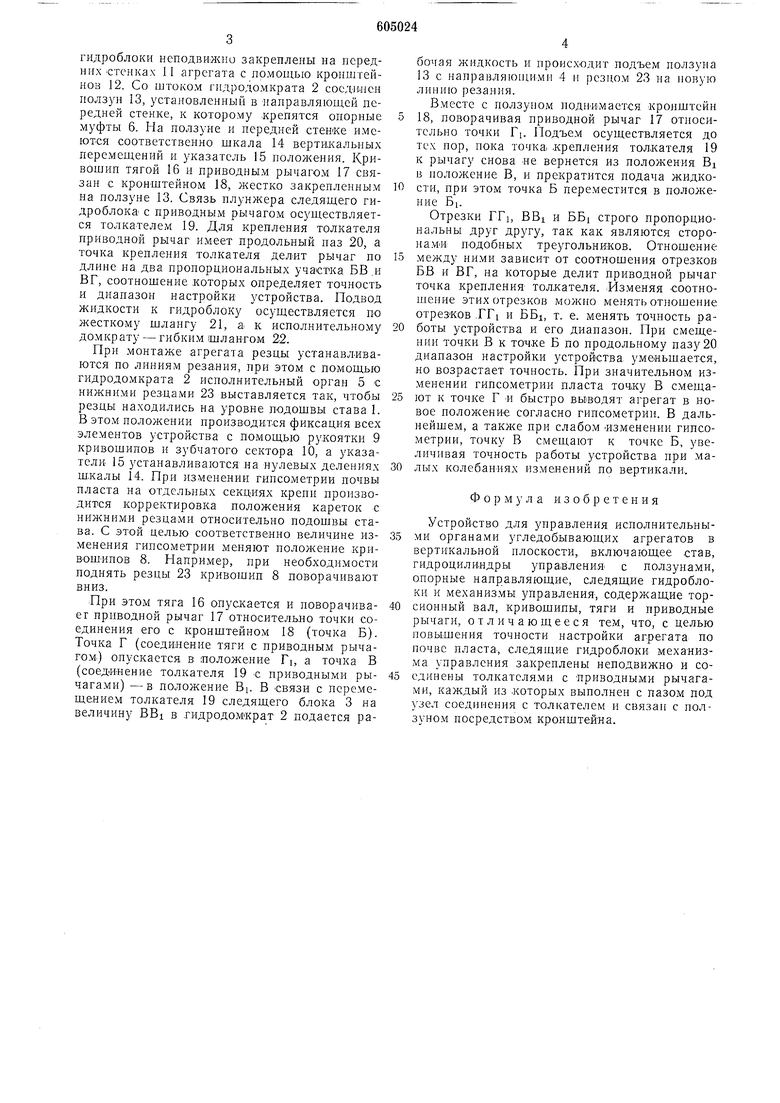

Фиг. 2
