1
Предлагаемые способ и устройство относятся к области балансировочной техники, а именно к технике измерения дисбаланса вращающихся роторов.
Известен способ измерения дисбаланса ротора, при котором величина неуравновещенности прочитывается по шкале индикатора, а угловая координата определяется путем сравнения фаз электрического сигнала от неуравновешенности с опорным сигналом генератора 1.
Известно также устройство для осуществления этого способа, содержащее блок измерения, генератор опорного сигнала с поворотным статором, который в процессе измерения вращается до момента совпадения фаз сигнала блока измерения и генератора, после чего угол дисбаланса считывается с градусной шкалы генератора.
Недостаток способа заключается в том, что измеренные величины дисбаланса не запоминаются из-за отсутствия в устройстве блока запоминания, что затрудняет дальнейшую автоматическую обработку результатов измерений.
Наиболее близким к предлагаемому способу по технической сущности является способ, при котором вектор дисбаланса измеряют и электрически запоминают в измерительной прямоугольной системе координат, а значения
составляющих дисбаланса для одной точки коррекции считывают по соответствующим стрелочным приборам и градусной щкале, связанной с ротором 2.
Устройство для осуществления этого способа содержит блоки измерения и запоминания дисбаланса по проекциям в прямоугольной системе координат, генератор сигнала несущей частоты, модуляторы несущей сигналами
проекций и блок индикации дисбаланса, выполненный в виде градусной шкалы на шпинделе для отыскания угла и величины коррекции на индикаторе.
Недостатком этого способа является то, что
вектор дисбаланса запоминается в пространстве в измерительной системе координат и остается неподвижным, как бы «оторванным от ротора, поэтому далее он отыскивается в механической системе координат на роторе нутем совмещения соответствующих делений шкалы с указателями, выражающими в пространстве направление осей измерительной системы координат. Устройство для осуществления способа выдает информацию о дисбалансе только для одной точки коррекции на роторе.
Однако, в ряде случаев для роторов с ограниченной или дискретной зоной коррекции необходимо иметь информацию о дисбалансе
для любых точек коррекции в виде проекций
вектора дисбаланса на оси, проходящих через выбранные точки.
Такая информация необходима, например, при балансировке крыльчаток вентиляторов, ступиц тормозных барабанов, роторов тур5огенераторов и т. д., для чего измеренный вектор дисбалансов требует донолнительного автоматического пересчета из одной системы координат в другую, определяемую осями коррекции на роторе.
Целью изобретения является автоматический пересчет дисбаланса из измерительной системы координат в отсчетную.
Эта цель достигается тем, что нзмеренный вектор дисбаланса электрически переносят в отсчетную нрямоугольную систему координат, связанную с ротором и согласованную с измерительной системой координат, угол расположения этого вектора задают в отсчетной системе координат нутем поворота ротора относительно осей отсчетной системы координат и электрически проектируют вектор на этн оси.
В предложенном способе вектор дисбаланса после запоминания в измерительной системе координат «привязывается непосредственно к ротору и при повороте ротора вектор, поворачиваясь вместе с ним, раскладывается на проекции в отсчетной системе координат, определяющей в пространстве долол.ение указателей мест коррекции на роторе.
1акой перенос вектора из измерительной системы координат в отсчетную, его «привязка к ротору и электрическое проектирование на оси отсчетной системы координат стали возможными благодаря тому, что блок индикации в устройстве для осуществления предлагаемого спосооа выполнен -в виде синуенокосинусного вращающегося трансформатора, механически связанного с ротором н подключенного двумя входами к выходам модуляторов, и двух синхронных детекторов, подключенных к выходам трансформатора.
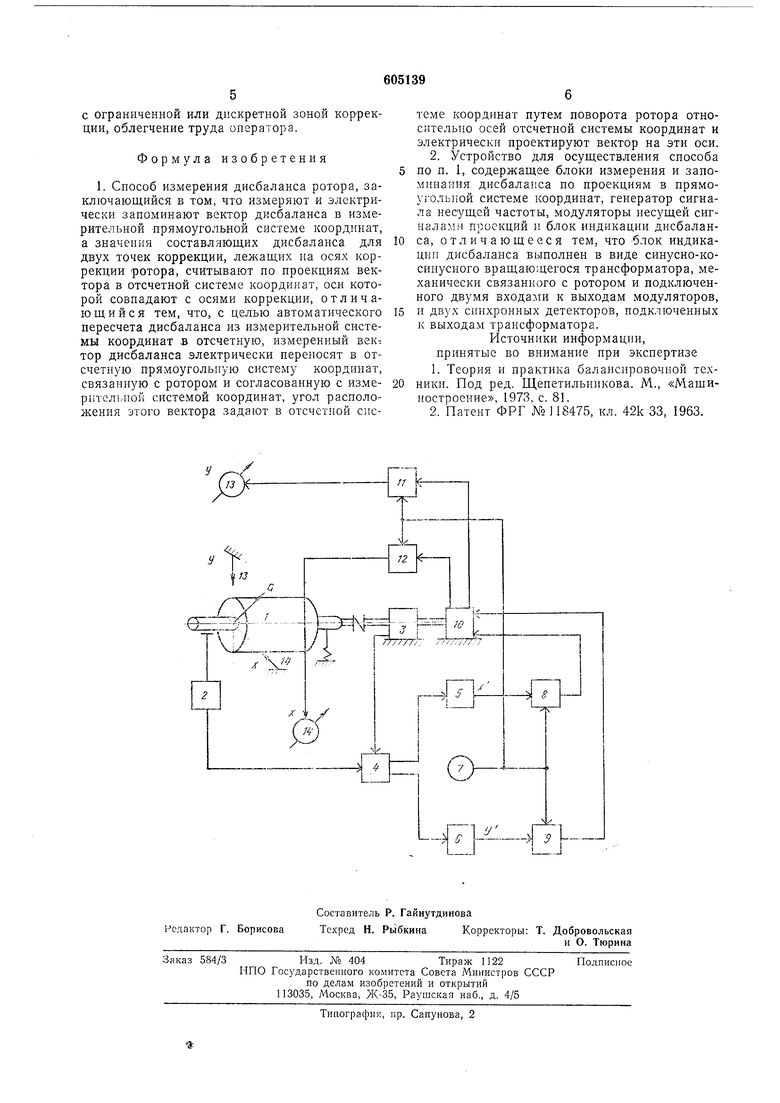
На чертеже изображена блок-схема устройства для осуществления способа измерения дисбаланса ротора.
,стройство содержит балансируемый ротор i, блок измерения, состоящий из датчика i дисбаланса, генератора 3 опорного сигнала и блока измерения дисбаланса в прямоугольной системе координат, на вход которого поступают сигналы от датчика 2 дисбаланса и генератора 3 опорного сигнала. Ьлок заноминания дисбаланса по проекциям состоит из двух элементов 5 и 6, входы которых соединены с выходом блока 4 измерения дисбаланса. Генератор 7 сигнала несущей частоты соед11нен с входами соединенных между собой модуляторов 8 н 9 несущей сигналами нроекций, вторые входы модуляторов 8 и 9 соединены с выходами элементов 5 и 6 соответственно. Блок индикации дисбаланса образован си.нусно-косинусным вращающимся трансформатором 10 (СКБТ), механически связанным с ротором 1 и подключенным двумя входами к выходам модуляторов 8 и 9, и двумя синхронными детекторами И и 12, подключенными к выходам СКВТ. Выходы синхронных детекторов 11 и 12 соединены с указателями 13 и 14 проекций дисбаланса соответственно. Устройство работает (для одной из плоскостей измерения) следующим образом.
Информация о дисбалансе G ротора 1 поступает с датчика 2 в блок 4 измерения. Туда же поступает опорный сигнал от генератора 3,
механически связанного с вращающимся ротором и определяющего направление осей измерительной (например, прямоугольной) системы координат. Вектор дисбаланса раскладывается в измерительной системе координат на проекции и запоминается по этим проекциям в элементах 5 и 6. С номощью генератора 7 сигнала несущей частоты эти проекции модулируются в модуляторах 8 и 9 и подводятся к роторным
(статорным) обмоткам СКВТ. Ротор СКВТ механическп связан с балансируемым ротором, а его статорные (роторные) обмотки определяют в пространстве направление осей новой, отсчетной системы координат, в которую
и переносится запомненный вектор дисбаланса.
После синхронного детектирования в детекторах 11 и 12 постоянные нанряжения, выражающие проекции вектора в отсчетной системе координат, поступают на указатели 13 и 14 нроекций дисбаланса. Показания этих указателей определяют величину дисбаланса для точек коррекции на роторе, расположенных против соответствующих указателей..
За счет мехаиической связи СКВТ с балансируемым ротором угловое положение вектора дисбаланса в отсчетной системе координат и его проекции определяются угловым положением ротора. Таким образом, происходит
автоматический пересчет значения дисбаланса на проекции для произвольного положения ротора относительно- указателей. Положение указателей согласовывают с измерительной и отсчетной системами один раз при настройке
всей измерительной системы.
Предлагаемый способ по сравнению с известными обеспечивает свободу выбора точек коррекции на роторе, позволяет исключить операцию привязки измерительной системы
координат к механической системе координат на роторе при наладке станка, позволяет исключить субъективную операцию отсчета угла дисбаланса и отыскания этого угла на роторе, обеснечнваст автоматический пересчет
проекций вектора дисбаланса в произвольпо выбранной системе координат на роторе.
Все это создает в балансировочной технике ряд положительных эффектов, папример иовыщение производительности балансировки за счет свободы выбора точек коррекции па роторе, сокращение времени измерения путем исключення операции электрического измерения угла дисбаланса, расщирение уннверсальности станков благодаря балансировке изделий
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ индикации дисбаланса ротора и устройство для осуществления способа | 1976 |
|
SU605140A1 |
| Способ двухцикловой балансировки роторов и устройство для его осуществления | 1987 |
|
SU1446506A1 |
| ИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО К БАЛАНСИРОВОЧНОМУ СТАНКУ | 1992 |
|
RU2054644C1 |
| Измерительное устройство к балансировочному станку | 1985 |
|
SU1270595A1 |
| Измерительное устройство к балансировочному станку | 1985 |
|
SU1320670A1 |
| Измерительное устройство к балансировочному станку | 1983 |
|
SU1095042A2 |
| Измерительное устройство к балансировочному станку | 1983 |
|
SU1167463A1 |
| Измерительное устройство к балансировочному станку | 1990 |
|
SU1746232A1 |
| Измерительное устройство к балансировочному станку | 1985 |
|
SU1259118A1 |
| Измерительное устройство к балансировочному станку | 1987 |
|
SU1420418A1 |
