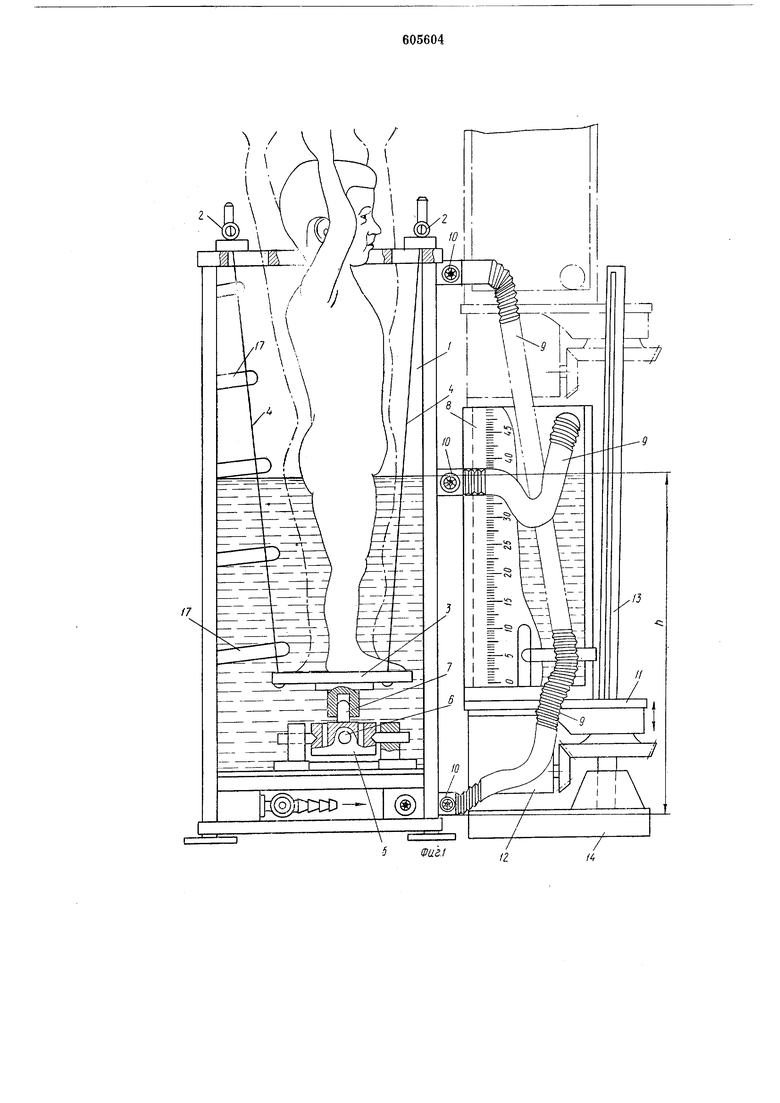
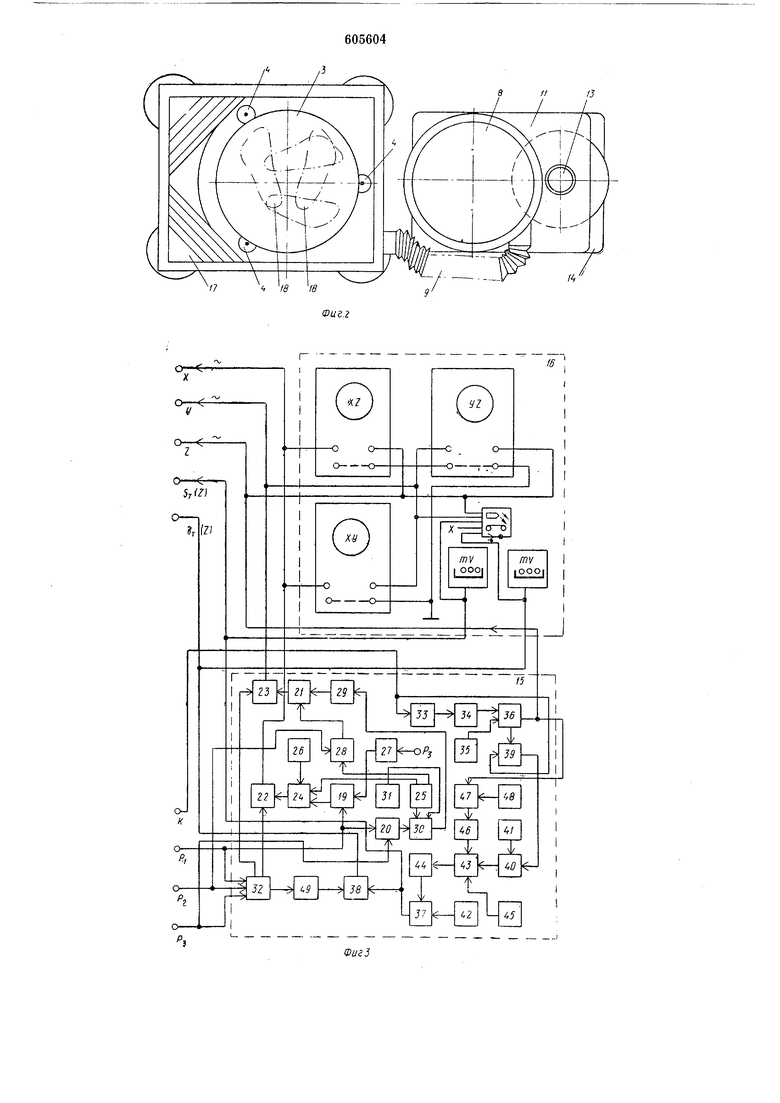
ходами датчиков 2, располагаемых иа одинаковом угловом расстоянии друг от друга. Число датчиков - не менее трех. Устройство работает следующим образом. Исследуемого опускают посредством перепоеной лестницы по угловым наклонны.м ступекькам 17, ставят па платформу 3 по отметкам 18 и взвешивают в сухом резервуаре, а затем измеряют объем вытесненной чистой воды при полном его погружении. На основании полученных данных определяют концентрацию добавок, необходимых для выравнивания плотности жидкости, контролируемой аэрометром, со средней плотностью тела. Для наполнения резервуара 1 жидкостью, нагретой до 40°С, и постепенного его опорожнения до требуемого уровня переключают направление движения электропривода 12 соответственно на подъем или на опускание переливного резервуара 8. Статический момент массы для каждого исследуемого уровня, получаемый по показаниям индикаторных приборов 16, соединенных с датчиками 2 динамометрической платформы 3, позволяет определить положения парциальных центров масс (координат z) части тела. Координата z изменяется по экспоненциальному закону, выраженному дифференциальным уравнением процесса изменения уровня при истечении жидкости d2, - кг, решением которого я яется интеграл (t)dt + z, который заложен в основу построения вычислительного прибора с индикатором, оценивающим координату z с помощью датчика в виде потепциометрического иоплавка (на чертеже ие показан), где k - постоянный коэффициент пропорциональности, подбираемый в соответствии с требованиями оптима.тьности процесса; го - начальный уровень жидкости. Автоматическое вычисление координат У, X центров тяжести (масс) сегментов тела соответственно во фронтальной и сагиттальной плоскостях выполняют при трех датчиках 2, установленных на динамометрическую платформу 3, по зпрощенным формулам; P2-R - 0,5R(Pj +РЗ) Pj + Рг + РЪ 0,866/; (Pi-РЗ) Р, + Рг + РЗ R - радиус окружности, по которой расположены датчики 2; PI, Р2, PS - величины сигналов датчиков. Нахождение в трех проекциях гравитационных линий парциальных центров масс исследуемых сегментов тела, площадей исследуемых сечений тела и средней плотности тканей сегментов в исследуемых сечениях благодаря вычислительному блоку 15, выходы которого соединены с индикаторными приборами 16 и входы - с выходами датчиков 2, связанных с динамометрической платформой 3, достаточно провести один раз, не заставляя исследуемого иодвергаться повторным процедурам и поворотам тела на 90°, обычно необходимых в данном неразрывно связанном комплексе биомеханических исследоваиий, для чего стенки резервуара 1 строго параллельны. Автоматическое вычисление за, одно исследование парциальных центров масс, площадей, занимаемых телом исследуемого, и средиих плотностей тканей при непрерывпом истечении жидкости, по плотности равной средней плотности тела исследуемого, производят по уравнениям: ST.(Z)B - dp 1 B - V-SO где ST - площадь, занимаемая телом, характеризующая место расположения проекции центра тяжести в исследуемом сечении; YT - средняя плотность, необходимая для определения измеряемой массы, характеризуемой проекцией центра тяжести;В - площадь еплощного поверхностного слоя жидкости в резервуаре 1. Вычисление происходит в вычислительном блоке 15, работа которого заключается в следующем. Сигналы датчиков 2, пропорциональные весам РЗ, Pi, PZ, поступают на входы сумматоров 19-21, причем сумматоры 20, 21 связаны с блоками 22, 23 деления. При этом на входы сумматора 20 иоступают сигналы PI и На блок 22 деления поступают переменные сигналы с блока 24 неремножения, входы которого связаны с блоком 25 в виде, например, трехканального источника постоянного напряжения, соответствующего величине, пропорциональной рабочему радиусу платформы 3 с блоком 26, который можно выполнить, например, в виде схемы, вычисляющей постоянную величину 0,866, и суммирующим блоком 19 в виде, например, делителя напряжения, на в.коды которого поступают сигналы PI непосредственно и РЗ после инвертора 27. На выходе блока 22 появляется координата центра тяжести. Координата У появляется на выходе блока 3, связанного с сумматорами 20 и 21. На ход сумматора 21 ноступают сигналы с блоа 28 перемножения, связанного со входной еличиной PZ, и с инвертора 29, на который оступают сигналы с блока 30 перемножения,
связанного с сумматором 20, с блоком 25 и с блоком 31, формирующим сигнал постоянной величины 0,5. Сигнал РЗ поступает на сумматор 20 и на один из входов сумматора 32, на второй вход которого поступают сигналы РЬ а на третий - сигналы Pz.
Автоматическое вычисление координаты z, ST(Z), ут(г) для совокупной характеристики линий направленностей центров тяжести во всех исследуемых проекциях на фоне занимаемых исследуемым телом площадей с учетом средних плотностей окружающих проекций центров тяжести тканей одновременно с определением координат X, Y выполняет вычислительный блок 15 следуюи.им образом.
Выходные сигналы с датчика лрор-ня в виде. 1тапример, потенциометрического поплавка (на чертеже не показан), пропорциональные коэффициенту «к, обпатиая величина которого представляет собой проекцию касательной к экспоненте, которая выражает скорость понижения уровня жидкости в данном сечении с учетом задаваемого режима, поступает на блок 33 на экспоненциальных элементах, вычисляющих коэффициент пззложеиия скорости пои интеграле задаваемо о объема измеряемого сегмента тела k с учетом верхнего и нгтжиего углов но редством интегральных соотнощений вольтампептюй хпрактеристтши нелинейного элет -тента. о- носительно которого действует н точигтк переменного напряжения, зависящей от за даваемой пежимом амплитуды, например, по мостовой схеме, плечами которой резисторы и конденсаторы, и диагональю - дттоц или траттзистор, последний начинает пропускать ток после того как в плечах мостовой схемы напряжение на конденсаторе становится равным напряжению на резистопе. Л а лее. с блока 33 через инвертор 34 и с блока 35, выполиенного, например, в виде исто ятгка постоянного напряжения, соответств ютцего величине, пропорцтоиальной .значению глчалыгого объема жидкости в резервларе 1. перементтые си -иальт поступают на сумматор 36, соединеииый обратной связью в качестве действительной системы воздействия с эталонным блоком 33 формирования нового управляюитего воздействия, с целью сглаживания возможных отклонений и возмущений в системе во время исследований.
Таким образом, на с мматоре 36 автоматически появляются координаты z исследуемых центров тяжести.
Автоматические вычислегтия Sr(z, (Z} для каждого момента измерения координат X, Y. Z центров тяжести сегментов тела в горизонтальной плоскости выполняются сумматором 37 и соответственно блоком 38 деления.
Блоки 37 и 38 работают во .взаимосвязи с остальными блоками следующим образом.
Сигналы, пропорциональные «к, с потенциометрического поплавка (на чертеже не показан) и с с шматора 36 через блок 39 перемножения поступают па блок 40 , другой вход которого связан с блоком 41. формиpyюцj;иI г сигнал постоянной величины, равной единице. Ка один вход сдмматора 37 постлпают сигналы с блока 42, выподцеииого в виде нссточника постоянного напряжения, соответствзЮ1цего пропорциональной величине площади зеркала резервуара 1, п после блока 43 перемножения через иипертор 44 - иа его
0 другой вход. На один из входов блока 43 перемножения поступают перемеитыя с гиалы с блока 40, а на второй и третгй входы - соотвстстренио с блока 45, вь пол;1еиого-в виде сточиика постоянного иаппяжения, соответствующ.его пропорц гоналы1ой величине плоитади живого сечешя иа выходе резервуара 1 устройства, и с блока 46 извлечения квадратиого корня, который строят, например, итерацией, связанного с блоком 47 перемножения, на один вход которого поступают перемет-мые сигналы с блока 36, а другой вход связан с блоком 48, формирующим сигнал постоянной величины, равной удвоенному коэффициенту земного ускорения.
5
Во введениом в уетройсттю общем вычисдительиом блоке 15 содержится блок диффереин.гфования 49. через который переменные сигтады с сумматора 32 поступают на блок 38.
Все выходы вычислительного блока 15 устройства связаны с иидикаторнымт приборами 16, причем выходы блоков 22, 23, 36, иа которых появляются соответственно координаты X, У, Z, локально ском.тутированы, например, с тиестиканальным осщтллоскопом или с тре5мя двухканальными, вставленными в одной плоскости так, чтобы на экранах появились комбинации размеиаеиия из трех элементов, отличаюн1;иеся друг от друга по два элемента, а именно в трех ироекциях - XZ, YZ. XY -
0 соответственно в сагиттальной, фронталыюй и горизонтальной п,лоскостя, с обеспечением возможиости сиДТультанной кттиофотосъемки с экраттов, обладающих памятью послесвечения, например двойной,
В комплекте индикаторных ппнборов 16
5 имеются также индикаторы для одиовре; т нной оценки показаиий ST(Z}. с выходов сумматора 37 и блока 38 леления, например, в виде и.иФровых милливольтметров. Все выходы вычислительного блока 15 связаиы с пя0тикаиальньтм устройство т, заиисывающим на фотопленку.
Тросы 4 натягивают равномерно под прибо5рами контроля и, как правило, распо.лагают вертикально. При этом , где Т - показание прибора. На фиг. 1 ТРОСЫ расиоложены под небольщцм углом к вертикали. В этом слЧЧае показания прибора корректируют
0 умножением на косинус угла отклонения троса от вертикали.
С учетом различных требований к режиму проведения исследований перепускные краны 10 можно градуиро ть пропорционально смецным задающим поправочным коэффициентам «к датчика уровня по контрольному набору сменных гидравлических насадок.
Формула изобретения
1. Устройство для определения центра тяжести тела человека, содержащее динамометрическую платформу с датчиками и индикаторные приборы, отличающееся тем, что, с целью измерения центров тяжести отдельных сегментов тела человека в горизонтальной плоскости, в нем установлены прозрачный резервуар, на верхнем открытом торце которого закреплены датчики динамометрической платформы, соединенные с платформой гибкими нерастяжимыми тросами, шарнир с двумя степенями свободы, основание которого закреплено на дне резервуара, а ось, расположенная соосно с динамометрической платформой, связана с ней пальцевым соединением, имеющим одну степень свободы, и соединенный с первым резервуаром тремя шлангами с тремя перепускными кранами переливной резервуар, установленный на площадке самоподъемного реверсивного электропривода с возможностью перемещения цо вертикальным направляющим, жестко закрепленным на основании первого резервуара.
2.Устройство по п. 1, отличающееся тем, что число датчиков устанавливают не менее трех и располагают их на одинаковом угловом расстоянии друг от друга.
3.Устройство по п. 1, отличающееся тем, что в него введен вычислительный блок, выходы которого соединены с индикаторными приборами, а входы - с выходами датчиков.
Источиики информации, принятые во внимание при экспертизе 1. Л1аррей М. и др. Центр тяжести, центр давления и реакция опоры при деятельности человека. J. of Applied Physiology, 1967, т. 23, № 6, с. 831. 17 -
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления магнитным подвесом транспортного средства | 1989 |
|
SU1812143A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАВИГАЦИОННЫХ ПАРАМЕТРОВ УПРАВЛЯЕМЫХ ПОДВИЖНЫХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2339002C1 |
| Устройство для определения ускорений произвольной точки судна | 1989 |
|
SU1816968A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ АВТОНОМНЫМ РОБОТОМ | 2008 |
|
RU2424105C2 |
| СТЕНД ДЛЯ ИЗМЕРЕНИЯ МАССЫ И КООРДИНАТ ЦЕНТРА МАСС ИЗДЕЛИЙ | 2013 |
|
RU2525629C1 |
| УСТРОЙСТВО КОНТРОЛЯ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2013 |
|
RU2536365C1 |
| СПОСОБ И УСТРОЙСТВО КОНТРОЛЯ ГОРИЗОНТАЛЬНОЙ ОРИЕНТАЦИИ АППАРАТА | 2007 |
|
RU2373562C2 |
| Обратимый преобразователь координат | 1975 |
|
SU590765A1 |
| МНОГОКАНАЛЬНАЯ СИСТЕМА ОБНАРУЖЕНИЯ ГИДРОАКУСТИЧЕСКИХ СИГНАЛОВ НА ОСНОВЕ ИНФОРМАЦИОННЫХ ПРИЗНАКОВ | 2024 |
|
RU2832248C1 |
| ПРОГРАММНО-АППАРАТНЫЙ КОМПЛЕКС И СПОСОБ ДЛЯ ВЫЧИСЛЕНИЯ ПОЛОЖЕНИЯ ЦЕНТРА ТЯЖЕСТИ ЧЕЛОВЕКА В ТРЕХМЕРНОМ ПРОСТРАНСТВЕ С ИСПОЛЬЗОВАНИЕМ БЕСКОНТАКТНОГО СЕНСОРА | 2021 |
|
RU2768183C1 |