(54) ПНЕВМОГИДРАВЛИЧЕСЮЙ ЦИФРОВОЙ ПОЗШЩОНШЙ ПРИВОД
| название | год | авторы | номер документа |
|---|---|---|---|
| Пневмогидравлический цифровой позиционный привод | 1980 |
|
SU906664A1 |
| Пневмогидравлический позиционныйпРиВОд | 1979 |
|
SU795869A1 |
| Пневмогидравлический позицион-Ный пРиВОд | 1979 |
|
SU795870A1 |
| Установка для деформирования трубчатых заготовок | 1982 |
|
SU1065061A1 |
| Пневмогидравлический привод много-МЕСТНыХ зАжиМНыХ пРиСпОСОблЕНий TEXHO-лОгичЕСКОгО ОбОРудОВАНия | 1979 |
|
SU795865A2 |
| Пневмогидравлический привод металлорежущих станков | 1978 |
|
SU779001A1 |
| Пневмогидравлический цифровой позиционный привод | 1981 |
|
SU1021827A1 |
| Установка для формования полых оболочек (ее варианты) | 1982 |
|
SU1101312A1 |
| Пневмогидравлический привод многоместных зажимных приспособлений технологического оборудования | 1977 |
|
SU1022801A2 |
| Пневмогидропривод возвратно-поступательного действия | 1980 |
|
SU907319A1 |
I
Изобретение относится к машиностроению, в частности к станко-агрегатостроению, и может быть использовано в качестве позиционного привода суппортов станков, проМьшшен- ных роботов и других гидрофицированных исполнительных механизмов. Известен пневмогидравлический цифровой привод, в котором перемещение исполнительного гидродвигателя определяется дозой рабочей жидкости, равной разности полного объема гидрополости мультипликатора и объема дозы жидкости, нагнетаемой мультипликаторе в гидравлическую камеру цифрового задатчика при движении поршней разрядов в исходное положение. Предельная точность позиционирования гидродвигателя определяется дискретностью младшего разряда, а его максимальнбе перемещение объемом минимальной дозы задатчика, нагнетаемой при перемещении его выходного звена {, J.
При этом управление двигателя ве дется по косвенному параметру, что увеличивает его ошибку позиционирования.
Цель изобретения - обеспечение точности позиционирования.
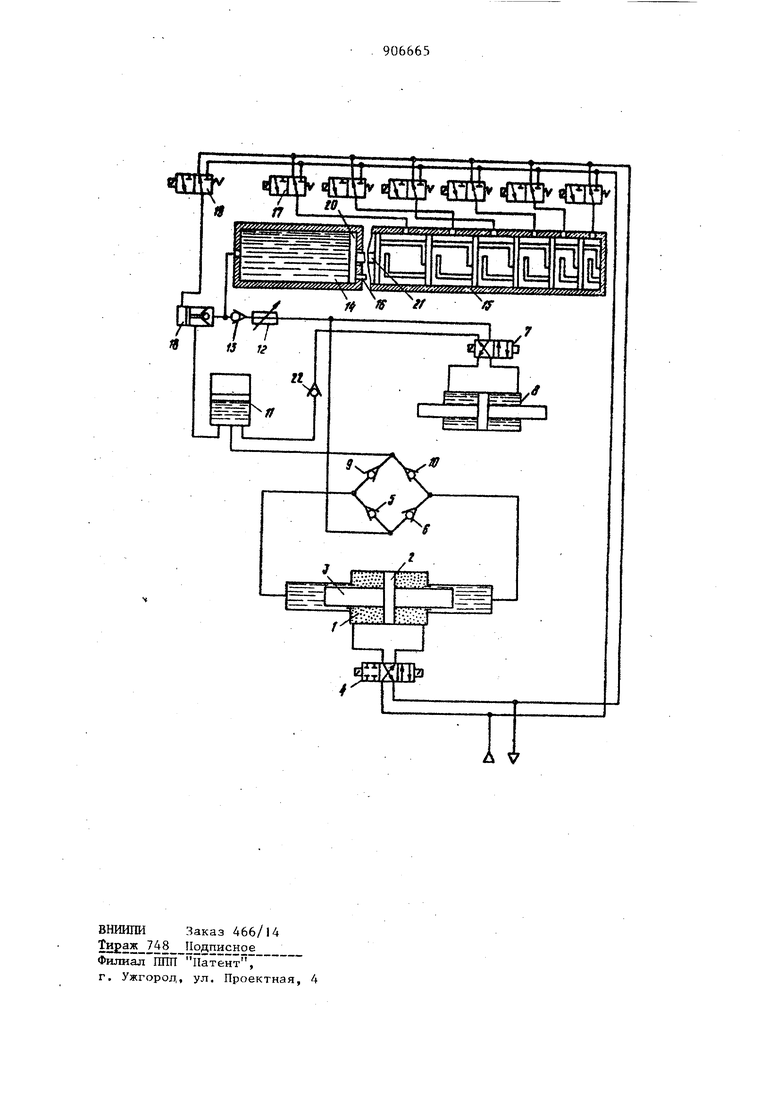
Указанная цель достигается тем, что пара гидравлических обратных клапанов моста мультипликатора своими . входгИШ сообщена с его гидропо10лостями, а выходами - со входом регулируемого дросселя, сообщенного параллельно через обратный гидроклапан с бесштоковой полостью гидравлической камеры цифрЪвого задат15чика координаты и со входом управляемого обратного гидроклапана, выход которого сообщен с компенсационной емкостью, а управляющая камера через двухпозиционный пкевморас20пределитель - с источником сжато го газа, при этом параллельный выход указанной пары обратных гидроклапанов подключен ко входу гидравличес39кого распределителя, сообщенного с напорной полостью гидродвигателя, сливная полость которого через указанный гидрораспределитель подключена ко входу гидравлического обрат ного клапана, выход которого сообще с компенсационной емкостью. На чертеже представлен пневмогидравлический цифровой позиционный привод. Привод состоит из пневмогидравлического мультипликатора 1 дву стороннего действия, содержащего порше 2 с плунжером 3, пневмополости которого сообщены с выходами трехпозиционного силового пневмораспредели- теля 4, запитанного от пневмосети. Гидравлические полости мультипликатора 1 связаны через обратные клапан 5 и 6 со входом гидравлического распределителя 7 исполнительного цилиндра 8 и параллельно через обратные клапаны 9 и 10 с компенсационным бачком 11, а через регулируемый дрос сель 12 и обратный клапан 13 - с гид рокамерой 14 цифрового задатчика 5 В правой торцевой крышке гидрокаме- ры 14 установлен концевой электровыключатель 16. К разрядам цифрового задатчика 15 подключены электропневмоклапаны 17, входы которьк соо щены с пневмосетьюо К гидрокамере 14 цифрового пневматического задатчика 5 подключен своим входом управляемый гидроклапан 18, с управля кщей полостью которого через элек тропневмоклапа1ил 19 сообщается пнев мосеть, а выход гидроклапама f8 сообщается с компенсационным бачком. Задатчик 15 выполнен в виде И разря ного цифрраналогового преобразователя, имеет гидравлическую камеру 14с поршнем 20, который связан с выходным звеном 2 задатчика 15. Сл ная полость гидроцилиндра 8 через гидрораспределитель 7 и обратный клапан 22 связана с компенсациошгым бачком 11.
Принцип работы изобретения заключается в следующем.
При подаче команды на один или несколько электропневмоклананов 17 цифрового пневмозадатчика 15 от элетрической системы управления срабатывают поршни соответствующих разрядов и выходное звено 21 задатчика 15 перемещается на заданное расстояние, вытесняя поршнем 20 соотФормула изобретения
1 Пневмогидравлический цифровой позиционный привод, включающий гшунжерный пневмогидравлический мультншшкатор, сообщенный через мост обратных клапанов и цифровой задатчик координаты, включающий гидрокамеру ветствукаций объем масла через управляемый обратный гидроклапан 18 в компенсационный бачок 11, при этом гидроклапан 18 открыт управляющим давлением от пневмораспределителя 19, который срабатывает одновременно с подачей команды на любой из электропневмоклапанов 1 7. После срабаты°вания цифрового задатчика 15 пневмораспределитель 4 переключается в одно из рабочих положений, при этом закрывается обратный клапан 18 и поршень 2 со штоком 3 мультипликатора двухстороннего действия 1 перемещается влево или вправо в соответствии с управляющим сигналом, поданным на пневмораспределитель 4, нагнетая рабочую жидкость из соответствукщей гидрополости через обратный клапан 5 (если поршень движется влево) или 6 (если поршень движется вправо) в соответствукйций канал гидрораспределителя 7 исполнительного гидроцилиндра 8, слив от которого через распределитель 7 и обратный гидроклапан 23 поступает в компенсационный бачок 1. Одновременно определенная часть жидкости, количество которой регулируется дросселем 12, через управляемый дроссель 12, обратный клапан 13 поступает в гидравлическую камеру 14 цифрового задатчика 15, возвращая его разряды в исходное положение при отключенных электропневмоклапанах 17. Регистрация исходного положения разрядов цифрового пневмо- задатчнка 13 осуществляется концевым выключателем 16. Заполнение гидрополостей мультипликатора происходит через обратные клапаны 9 (если поршень 2 движется вправо) или 10 (если поршень 2 движется вЛево) из компенсационного бачка 1I. Таким образом, при грубой разрешающей способности младшего разряда достигается необходимая точность перемещения исполнительного двигателя.
со штоковой. и бесжтоковой полостями, с гидравлическим двигателем с напорной и сливной полостями и компенсационную емкость, отличающийся тем, что, с целью обеспечения точности позиционирования, введены регулируемый дроссель пара обратных .клапанов и управляемый обратный клапан, входы моста обратных клапанов сообщены с гидрополостями мультипликатора, а выходы - с входом регулируемого дросселя, сообщенного параллельно через один из обратных клапанов с бесштоковой полостью гидрокамеры цифрового задатчика и с входом управляемого обратного клапана, выход которого сообщен с компенсационной емкостью, а управляющая камера через пневмораспределитель - с источником сжатого газа, при этом параллельный выход моста обратных клапанов подключен через гидравлический распредет{тель к напорной полости гидродвигателя, сливная полость которого через тот же распределитель и другой обратный клапан сообщена с компенсационной емкостью,
2-. Привод по п. 1, отличающийся тем, что в крышке гидрокамеры щфрового задатчика со стороны штоковой полости установлен концевой выключатель.
Источники информации, принятые во внимание при экспертизе
I о Авторское свидетельство СССР по заявке № 2763858, кл. В 23 Q 5/26, 1979,
