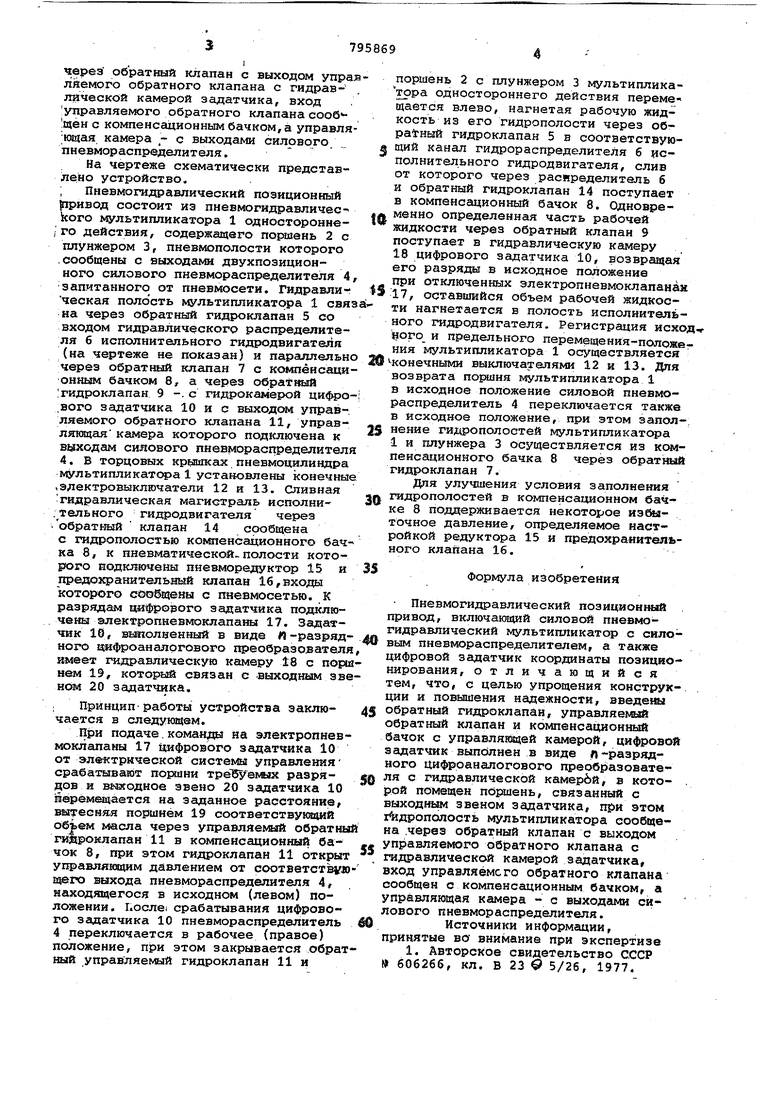
(54) ПHEBMOГ ДPABЛИЧECKИЙ ПОЗИЦИОННЫЙ ПРИВОД через обратный клапан с выходом упрая лйемого обратного клапана с гидравлической камерой задатчика, вход управляемого обратного клапана сооб щен с компенсационным бачком, а управля ющая камера ,- с выходами силового, пиевмораспределителя. На чертеже схематически представлено устройство. ; Пневмогидравлическкй позиционшлй ртривод состоит из пневмогндравличес koro мультипликатора 1 одностороннего действия, содержащего поршень 2 с плунжером 3, пневмополости которого .сообщены с выходами двухпозиционного силового пневмораспределителя 4 запитанного от пневмосети. Гидравлическая полость мультипликатора 1 свя на через обратный гидроклапан 5 со входом гидравлического распределителя б исполнительного гидродвигателя (на чертеже не показан) и пафаллельн через обратный клапан 7 с компенсаци онным бачком 8, а через обратЖа1й :гидроклапан 9 -.с гидрокамерой цифро .вого задатчика 10 и с выходсяш управляемого обратного клапана 11, управлякяцая камера которого подключена к выходам силового пневмораспределител 4. в торцовых крышках пневмоцилиндра мультипликатсфа 1 установлены конечны , электровыклгочатели 12 и 13. Сливная гидравлическая магистраль исполни.тельного гидродвигателя через обратный клапан 14 сообщена с гидрополостью компенсационного бач: ка 8, к пневматической-полости которого подключены пневморедуктор 15 и пред гфанительиый клапан 16,входы которого сообщены с пневмосетью. К разря дам цифрового задатчика подключены алектропневмоклапаны 17. Задатчнк 10, ввшолаенный в виде «-разряд ного цифроаналогового преобразовател имеет гидравлическую камеру 18 с пор нем 19, которьй связан с .выходным зв ном 20 задатчика. ; Принцип работы устройства эаключается в следунвдем. При подаче.команда на электропнев моклапаны 17 цифрового задатчика 10 от электрической системы управления срабатывают поршни требуемых раэрядов и выэсодное звено 20 задатчика 10 нерем дается на заданное расстояние, шатесняя поршнем 19 соответству си1Ий масла через управляеАФ11й обратны г«яроклапан 11 в компенсационный бачок 8, при этом гидроклапан 11 открыт управляющим давлением от соответствую щего выхода пневмораспределителя 4, находящегося в исходном (левом) положении. После срабатывания цифрового задатчика 10 пневмораспределитель 4 переключается в рабочее (правое) положение, при этом закрывается обра или управляемый гидроклапан 11 и поршень 2 с плунжером 3 мультипликатрра одностороннего действия перемещается влево, нагнетая рабочую жидкость из его гидрополости через обратный гидроклапан 5 в соответствующий канал гидрораспределителя б исполнительного гидродвигателя, слив от которого через раснределитель б и обратный гидроклапан 14 поступает в компенсационный бачок 8. Одновременно определенная часть рабочей жидкости через обратный клапан 9 поступает в гидравлическую камеру 18 цифрового задатчика 10, возвращая его разряды в исходное положение при отключенных электропневмоклапанах 17, оставшийся объем рабочей жидкости нагнетается в полость исполнительного гидродвигателя. Регистрация исход. ||ого и предельного перемещения-положения мультипликатора 1 осуществляется конечными выключателями 12 и 13. Для возврата поршня мультипликатора 1 в исходное положение силовой пневмораспределитель 4 переключается также в исходное положение, при этом заполнение гидрополостей мультипликатора 1 и плунжера 3 осуществляется из компенсационного бачка 8 через обратный гидроклапан 7. Для улучшения условия заполнения гидрополостей в компенсационном бачке 8 поддерживается некоторое из точное давление, определяемое настройкой редуктора 15 и предохранительного клапана 16. Формула изобретения Пневмогидравлический позиционный привод, включающий силовой пневмогидравлический мо льтипликатор с силовым пневмораспределителем, а также цифровой задатчик координаты позиционирования, отличающийся тем, что, с целью упрощения конструкции и повышения надежности, введеиы обратный гидроклапан, управляемый обратный клапан и компенсационный бачок с управляймцей камерой, цифровой задатчик выпсхлнен в виде п-разрядного цифроаналогового преобразователя с гидравлической камербй, в кото- . рой помещен поршень, связанный с выходньш звеном задатчика, при этом г дрополость мультипликатора сообщена .через обратный клапан с выходом управляемого обратного клапана с гидравлической камерой задатчика вход управляемого обратного клапана сообщен с компенсационным бачком, а управляющая камера - с выходами силового пневмораспределитепя. Источники информации, принятые ВО внимание при экспертизе 1. Авторское свидетельство СССР 606266, кл. В 23 5/26, 1977.
СЩР

| название | год | авторы | номер документа |
|---|---|---|---|
| Пневмогидравлический позицион-Ный пРиВОд | 1979 |
|
SU795870A1 |
| Пневмогидравлический цифровой позиционный привод | 1980 |
|
SU906665A1 |
| Пневмогидравлический цифровой позиционный привод | 1980 |
|
SU906664A1 |
| Пневмогидравлический привод много-МЕСТНыХ зАжиМНыХ пРиСпОСОблЕНий TEXHO-лОгичЕСКОгО ОбОРудОВАНия | 1979 |
|
SU795865A2 |
| Установка для деформирования трубчатых заготовок | 1982 |
|
SU1065061A1 |
| Пневмогидравлический привод металлорежущих станков | 1978 |
|
SU779001A1 |
| Пневмогидравлический привод многоместных зажимных приспособлений технологического оборудования | 1977 |
|
SU1022801A2 |
| Пневмогидравлическая насосная установка | 1977 |
|
SU1036964A1 |
| Установка для формования полых оболочек (ее варианты) | 1982 |
|
SU1101312A1 |
| Пневмогидравлический дозатор | 1976 |
|
SU606266A1 |

