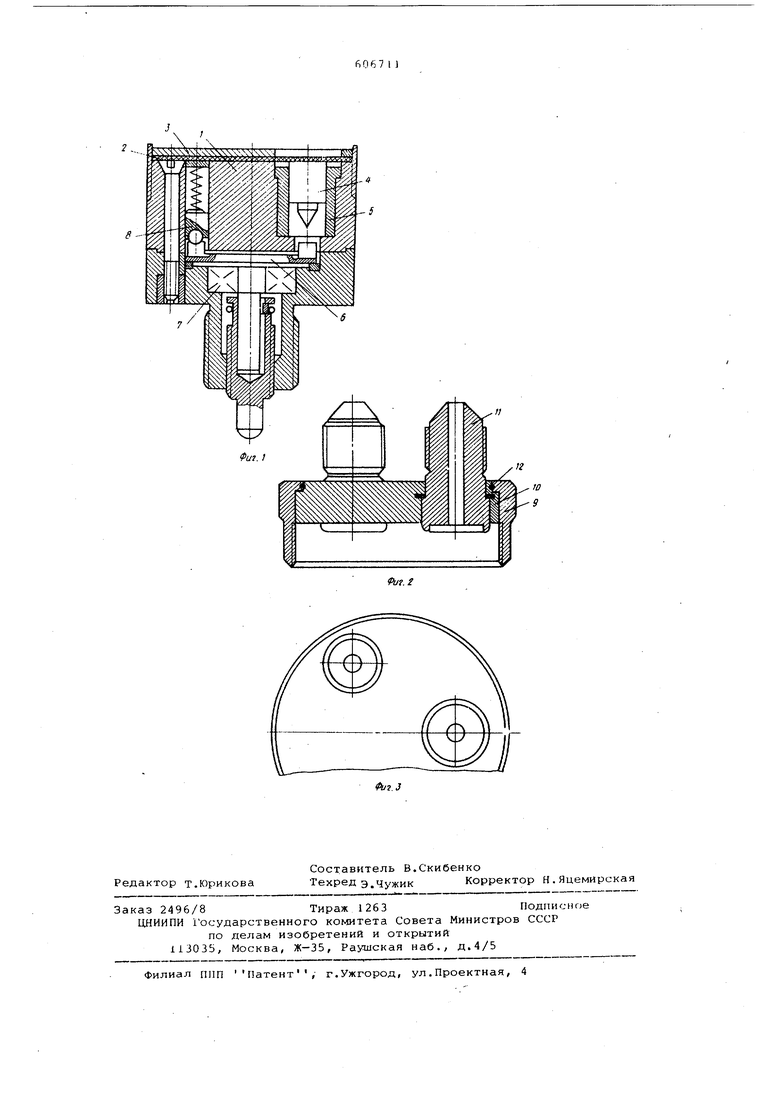
ройства фиксируется в подшипнике 7 и имеет шестерню с профилированными зубьями, выполненную как целое с ротором. Шариковые замки 8 входят между зубьями шестерни ротора. Захватывающая головка (на фиг.1 не показана) соединяется с корпусом 1 накидной гайкой 9, внутри которой сФдержитсн пластина 10 со штуцерами И. Свободный проворот пластины 10 относительно накидкой гайки осуществляетс.я по уплотнительнрму кольцу 12.
Работает устройство следующим образом.
Корпус 1 устройства устанавливают на изделие, затем соединяют его с захватывающей головкой, которая связана с питающими коммуникациями блока управления через штуцера 11. Торцы внутренних полостей штуцеров при соединении захватывающей головки с корпусом устройства прижимают плотно мембрану 2 к верхней проточке стальной втулки 5 и таким образом происходит герметичное отделение внутренней полос ти исполнительной части устройства от регулируемой среды блока управления. При получении импульса давления мембрана прогибается и перемещается плунжер 4 вниз, который своим коническим концо воздейств ует на профилированный зуб шестерни ротора 6 и поворачивает ротор на 1/3 зуба. После воздействия всех трех плунжеров вал ротора, преодолевая сопротивление шариковых замков 8, поворачивается на один зуб и фиксирует- ся им. Мембрана возвращает плунжеры в исходное положение. Для перемещения вала на один оборот необходимо подать от блока управления 60 импульсов, т.е. по 20 импульсов на каждый плунжер. При перемещении ротор, воздействует на .регулируемый узел изделия и фиксирует его в требуемом положении. По окончании процесса регулировки захватывающую головку с коммуникациями отсоединяют о корпуса устройства .
Использование устройства, включающегО корпус с установленной в нем эластичной мембраной vi захватывающую головку с постоянно соединенными с ней питающими коммуникациями от блока управления,- позволяет значительно сократить время на подготовку и проведение этапа регулирования изделий на стенде, в предлагаемом устройстве полости регулируемого узла герметизированы и предохранены от взаимопроникновения и загрязнения. Кроме того, оно имеет меньший по сравнению с известными устройствами вес, конструктивно проще и более удобно в эксплуатации .
Формула изобретения
1.Устройство для дистанционного управления исполнительным органом, содержащее корпус,в котором расположены чувствительные элементы в виде плунжеров, связанных с шестернями ротора, и захватывающую головку, соединенную
с корпусом, отличающееся тем, что, с целью упрощения устройств оно содержит штуцера, установленные в захватывающей головке, и эластичную мембрану, закрепленную на корпусе и соединенную с торцами плунжеров.
2.Устройство ПОП.1, отличающееся тем, что соединение захватывающей головки с корпусом выполнено разьемным.
Источники: информации, принятые во внимание при экспертизе:
1.Авторское свидетельство СССР № 437602, кл. В 23 Q 5/06, 1974.
2.Сосонкин В.А. Дискретная гидроавтоматика, М., Машиностроение, 1972, с.42.
2 ..
8 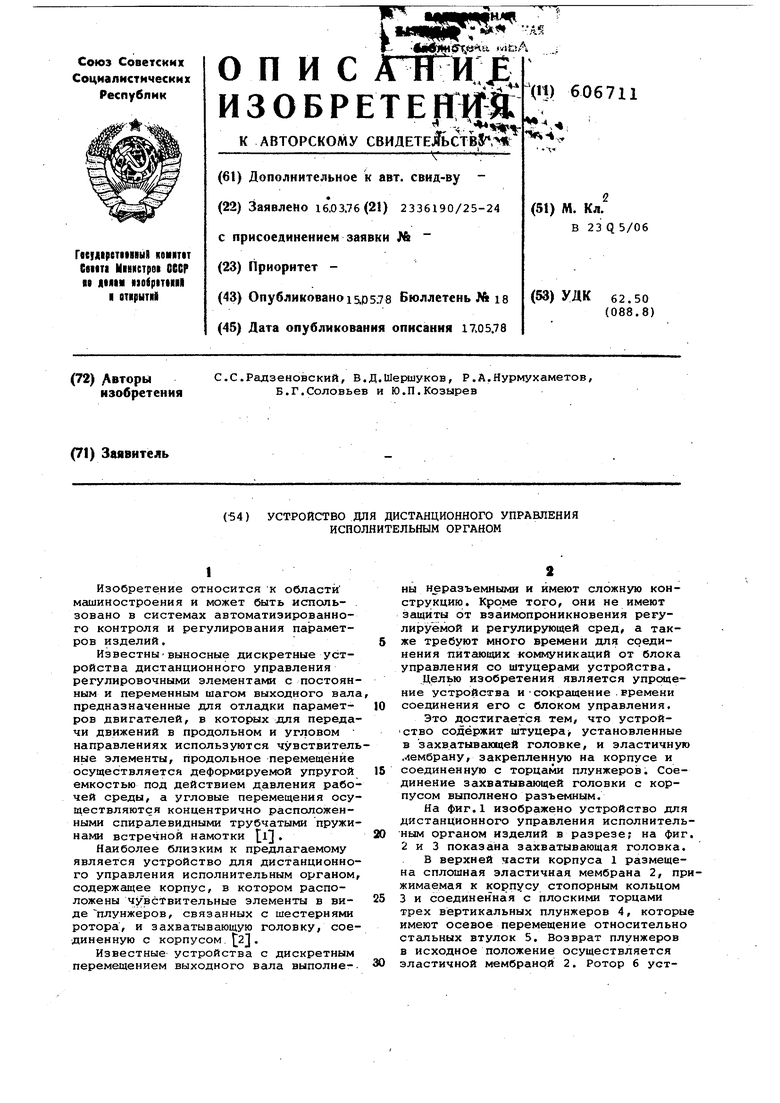
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство дистанционного управления исполнительным органом | 1977 |
|
SU681233A1 |
| Устройство для дистанционного управленияиСпОлНиТЕльНыМ ОРгАНОМ | 1979 |
|
SU796833A1 |
| Устройство дистанционного регулирования параметров двигателя | 1976 |
|
SU619685A1 |
| ПНЕВМАТИЧЕСКИЙ МНОГОДОЗОВЫЙ БЕЗЫГОЛЬНЫЙ ИНЪЕКТОР | 2003 |
|
RU2241413C1 |
| НАТЯЖНОЕ УСТРОЙСТВО | 2000 |
|
RU2191938C2 |
| СВЕРЛИЛЬНО-КЛЕПАЛЬНЫЙ АВТОМАТ | 1968 |
|
SU220010A1 |
| КЛАПАН НИЖНЕГО СПУСКА С ВСТРОЕННЫМ ПНЕВМАТИЧЕСКИМ ПРИВОДОМ | 2012 |
|
RU2503867C1 |
| Устройство для формования изделий "мюзле | 1977 |
|
SU751485A1 |
| СИЛОВАЯ УСТАНОВКА | 1989 |
|
RU2029880C1 |
| Машина для исследования сложного напряженного состояния трубчатых образцов материалов | 1958 |
|
SU121586A1 |