исследований непосредственно определить оптимальные параметры виброзащнтных средств.
Целыа изобретения является повышение то юсп) и быстродействия устройства.
Это достигается тем, .что предлагаемое устрсйство содержит блоки моделирования инструмента и виброзаищты, фазовращатель и блок сравиеякя фаз, первый вход которого подсоединен к выходу датчика перемещения, а выход - к первому входу фазовращателя, подключенного выходом к дополнительному входу усилителя, первые входы и выходы блоков моделирования инструмента и виброзащиты соеданены с соответЬтвующими вьь ходами и входами блока оптимизации, второй выход блока моделирования виброзащиты цодключей ко вторым входам блока сравнения, фазовращателя и блока сравнения фаз, а его второй и входы подсоедипе11Ы соответственно к датчику шяы и ко второму выходу блока моделирова{шя инструмента.
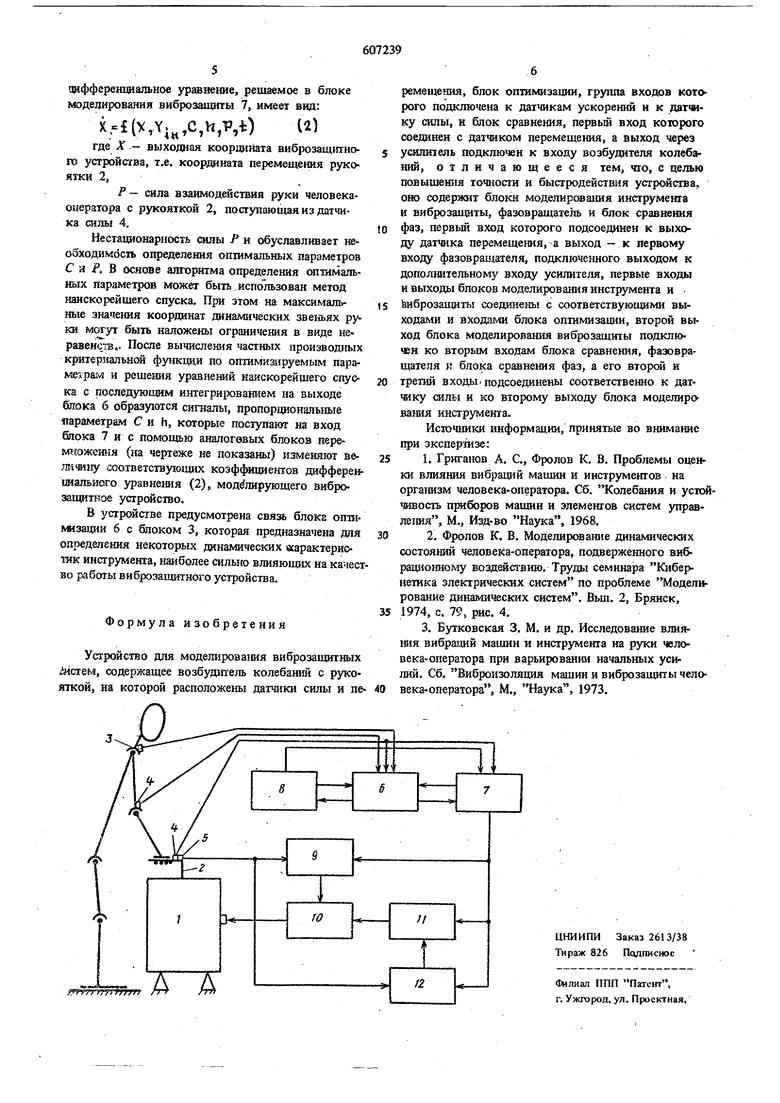
На чертеже представлена блок-схема описьшаемого устройства для моделирования виброзашитных систем.
Устройство для моделирования виброзащитных систем содержит возбудитель колебаний 1 с рукояткой 2, датчики ускорений 3, расположе1шые на динамических звеньях руки. Датчики силы 4 и перемещения 5, расположен1п 1е на рукоятке 2, блок оптимизации 6, блок 7 моделирования виброзащнты, блок моделирования инструмента 8, блок сравнения 9, усилитель JO, фазовращатель 11 и блок 12 сравнения фаз.
Устршство работает следующим образом.
В блоке 8 модулируются дифференциальные уравнения, описьшаюиие дшшлшку рабочих частей исследуемого инструмента. Результатом решения з(гах.уравнений является функдая перемещения корпуса инструмента от времеш. Сигнал, пропорциональный этой функщга, поступает на вход блока 7, в котором моделируются дифференциальные уравнения, описывающие виброзащитное устройство На вход блока 7 поступает сигнал, пропорциональный силе взаимодействия руки с рукояткой; из датчика силы 4. Таким образом, на виброзащитюё устройство, моделируемое в блоке 7, действует со стороны корпуса инструмента кинематическое и силовое возбуждения, которые в виде электр{ческих сигналов поступают на соответствующий вход. Результатом совместного решешя уравнений, модеашруемыхв блоке 8 и в блоке 7, является функция перемещения рукоятки исследуемого инструмента от времени, сигаал, пропорциональньш которой, поступает на выход блока 7.
Этот сшнал через фазовращатель 11 и усилитель 10 поступает на вход возбудителя колебаний 1, который трансформирует электрический сигнал в механическое движение и прикрепленная к нему рукоятка 2 имитирует перемещение рукоятки иссле дуемого инструмента. Сила взаимодействия руки человека-оператора с укрепленной на столе возбудателя колебаний 1 рукояткой 2 регастрируется датчиком (эщы 4. Ввиду того, что для имитации перемеще шя рукоятки исследуемого инструмента требуется высокая точность трансформации злектрического сигнала, а присоединенная масса руки человека-оператора к рукояже 2 является переменной величииой, для управления возбудителем колебаний введена обратная связь. Она осуществлен с помощью блока сравнения 9 и блока сравнения фаз 12, фазовращателя Ни усилителя 10. На входы блока сравнения фаз 12 поступает сигнал, пропорциональный перемещению рукоятки 2 с датчика S, и задающий сигнал с выхода блока 7. Отклонение, появивщееся При сравнении на ишьных фаз зтих сигналов, управляет фазовращателем 11, управляющий вход которого соединен с выходом блока 12. Для поддержания амплитуды перемещения рукоятки 2, соответствующей сигналу с выхода блока 7, служит блок сравнения 9, входы которого соединены с выходом перемещения бис выходом блока 7, а выход с управляющим входом ушлителя 10.
Блок оптимизации 6 предназначен для автоматической настройки параметров жесткости и диссипативности по заранее заданному критертю качества работы виброзащиты. Критерием качества работы виброзащиты могут быть наименьшие амплитуды перемещения рукоятки и последующих звеньев руки при ограниченных виброскоростях или наименьшие амплитуды виброускорений при наличии ограничений на перемещение рукоятки относительно корпуса инструмента.
Таким образом, на входы блока оптимизации6 поступает информафя о текущих значениях координат из датчиков 4, 4, 2, а также значение координаты перемещения корпуса инструмента с выхода блока 8 и иекоторьге динамические характеристики само виброзащиты с выхода блока 7,
Пусть моделируемый инструмент описывается системой дифференциальных уравнешш;
li(j4 i fi CjK)Y,,I,(i) Ш
и координата YJM() является функций) перемеще{шя корпуса инструмента. Если рукоятка бы.ла бы прикреплена к корпусу инструмента непосредственно, то и ее движение, соответствовало бы коор динате Yjjj(t). Однако для снижения уровня вибрации на рукоятке используется виброзащитное устройство, состоящее из упругих и диссилативных элементов. Система уравнешй (1) моделируется в блоке 8 и сигнал, пропорциональный коордатате Yi-j (i) j с выходов поступает на вход блока 7 моделирования виброзащиты и в блок оптимизации 6.
В простейшем случае виброзащитное устройство состоит из упругого элемента жесткости С и демпфера с коэффициентом сопротивления h, и
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для моделирования виброзащиты оператора | 1979 |
|
SU864304A1 |
| Устройство для полунатурногоМОдЕлиРОВАНия | 1976 |
|
SU822218A2 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ ГАСИТЕЛЬ КОЛЕБАНИЙ | 1971 |
|
SU310068A1 |
| Устройство для полунатурного моделирования | 1976 |
|
SU734734A1 |
| Устройство для моделирования виброударных механических систем | 1977 |
|
SU714420A1 |
| Устройство для виброзащиты сиденья транспортного средства | 1983 |
|
SU1124266A1 |
| Устройство виброзащиты кабины машиниста экскаватора | 1987 |
|
SU1537774A1 |
| Устройство для моделирования ротор-НыХ СиСТЕМ | 1979 |
|
SU822221A1 |
| Устройство для полунатурного моделированияМЕХАНичЕСКиХ КОлЕбАТЕльНыХ СиСТЕМ | 1979 |
|
SU840963A1 |
| Устройство для моделирования нелинейных колебательных систем | 1975 |
|
SU516057A1 |
