I
Изобретение относится к автоматическому управлению и может быть использовано в качестве силовых следящих приводов с компенсацией упругих деформаций и люфта в редукторе в условиях повышенных требований к точности работы и помехоустойчивости при наличии в управляющем сигнале высокочастотных помех
Известна следящая система, содержащая объект регулирования, измеритель угла рассогласования, выход которого через последовательно соединенные сумматор и усилитель подключен ко входу исполнительного- двигателя и блок дифференциаторов, выход которого связан со входом сумматора. Между валом исполнительного двигателя и валом объекта включен датчик крутящего момента. На валу исполттельного двигателя установлен датчик угловых ускорений. Выход датчика крутящего момента через первый блок преобразования, а выход датчика угловых ускорений через второй блок преобразования подключены ко входам блока дифференциаторов. Управляющий сигнал поступает через сумматор и усилитель на исполнительный двигатель, передающим вращение на
нагрузку. Действие внешнего возмущающего момента, приложенного к объекту регулирования, воспринимается датчиком крутящего момента и датчиком угловых ускорений вала исполнительного двигателя, и после преобразования вводится на вход сумматора в виде компенсирующей обратной связи 1.
Недостатком этой следящей системы является то, что наличие упругих деформаций и люфтов существенно снижают точность слежения
10 в процессе работы следящей системы. Кроме того, наличие в управляющем сигнале вь1сокочастотной помехи приводит к значительному снижению точности слежения и помехоустойчивости следящей системы.
15
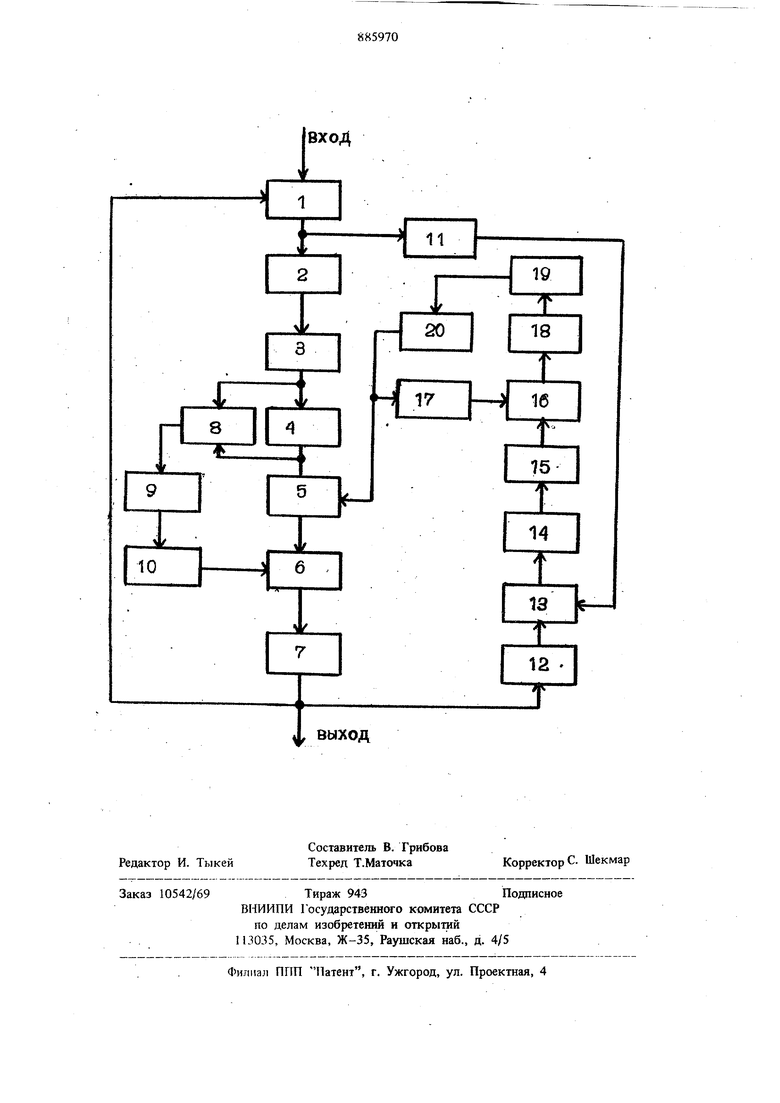
Известна также следящая система, которая содержит управляющий блок, основной и дополнительный двигатели, подключенные через дифференциал к двухступенчатому редуктору, связанному с объектом регулирования, двухполюс20ный датчик угла, подключенный к выходу первой ступени, многополюсный датчик угла, установленный на выходном валу. Выход двухполюсного датчика утла соединен с электричесКИМ входом многополюсного датчика угла, выход которого подключен ко входу управляющего блока. Управляющий сигнал подается через блок управления на основной двигатель, передающий вращение на нагрузку через дифференциал и редуктор. Действие нагрузки при водит к появлению упругих деформаций в редукторе. Разность угловых положений валов на входе и выходе второй ступени редуктора, вызванная упругими деформациями, измеряется двухполюсным и многополюсным датчиками углов поворота и вводится через управляющий блок, дополнительный двигатель. и дифференциал в качестве компенсирующей добавки 2, Недостатком этой следящей системы являет ся то, что влияние нежесткости редуктора на точность слежения не устраняется; Наличие упругих деформаций и люфтов в редукторе в значительной мере снижают точность слежения. Кроме того, в процессе эксплуатации управляю щий сигнал содержит вьгсокочастотную помеху. Это приводит к тому, что точность и помехоустойчивость следящей системы существенно снижаются. Наиболее близкой по технической сущности к предлшаемому является следящая система с компенсацией упругих деформаций и люфта в редукторе, содержащая последовательно соединенные измерительный блок, на который подан входной сигнал, первый усилитель, исполнительный двигатель, корректирующий двигатель, выполненный в виде гидроцилиндра с поворотной лопастью, объект регулирования, выход которого подан на вход измерительного блока, а также блок компенсации, состоящий из измерителя разности углов поворота, входы которого подключены к входному и выходному валам редуктора, а выход включен на вход последовательно соединенных второго усилителя и преобразователя, выход которого подан на вход корректирующего двигателя. Работа следящей системы заключается в следую щем. При подаче сигнала с измерительного блока на выходе исполнительного двигателя устанавливается некоторое значение скорости. Если угловые положения входного и выходног валов редуктора совпадают, то сигнал управления блоков компенсации, формируемый измерителем разности углов поворота входного и выходного валов редуктора равен нулю. При появлении углового рассогласования из-за наличия люфтов, упругих деформаций в редукторе и возмущений, связанных с нагрузкой, сигнал рассогласования с измерителя разности углов поворота входного и выходного валов редуктора подается через второй усилитель на преобразователь, управляющий работой корректирующего двигателя, который обеспечивает введени корректирующей добавки. В результате сложения текущего углового положения выходного вала редуктора с корректирующей добавкой происходит компенсация влияния люфтов, упругих деформаций и возмущений, связанных с нагрузкой. При появлении в процессе эксплуатации в управляющем сигнале высокочастотной помехи не обеспечивается высокая точность слежения и помехоустойчивость следящей системы с компенсацией упругих деформаций и люфта в редукторе 3. Недостатком известной системы является |Малая точность слежения и помехоустойчивость. Цель изобретения - повыщение точности и помехоустойчивости следящей системы с компенсацией упругих деформаций и люфта в редукторе. Поставленная цель достигается тем, что в следящую систему, содержащую последовательно соединенные измерительный блок, первый усилитель, исполнительный двигатель, первый редуктор, дифференциал, первый корректирующий двигатель, объект регулирования, выходом подключенный к второму, входу измерительного блока и первому датчику угла, а также измеритель угла рассогласования, два входа которого подключены соответственно к входу и выходу первого редзтстора, а выход - через последовательно соединенные второй усилитель, преобразователь ко второму входу первого корректирующего двигателя, введены ограничитель и последовательно соединенные сумматор, фильтр, экстраполятор, блок сравнения, третий усилитель, второй корректирующий двигатель, второй редуктор и второй датчик угла, выход и вход которого подключены к вторым входам соответственно блока сравнения и дифференциала, выход ограничителя соединен с первым входом сумматора, второй вход которого подключен к выходу первого датчика угла, а вход ограничителя соединен с выходом измерительного блока. На чертеже представлена функциональная схема предлагаемой системы. Следящая система содержит последовательно соединенные измерительный блок 1, первый усилитель 2, исполнительный двигатель 3, первый редуктор 4, дифференциал 5, первый корректирующий двигатель 6, выполненный, например, в виде гидроцилиндра с поворотной лопастью, объект регулирования 7, охваченный отрицательной обратной связью. Канал компенсации упругих деформаций и люфта в редукторе состоит из послегювательно соединенных измерителя 8 угла рассогласования, который соединен с входным и выходным валами редуктора 4, второго усилителя 9, преобразователя 10, подключенного к корректирующему двигателю 6.
Канал формирования низкочастотной составляющей спектра дополнительного про1раммного сигнала состоит из ограничителя 11, вход которого подключен к выходу измерительного блока 1, соединенных последовательно датчика 12 угла, вход которого подключен к выходу объекта 7 регулирования, сумматора 13, фильтра 14, экстраполятора 15, узла 16 сравнения, датчика 17 угла третьего усилителя 18, второго корректирующего двигателя 19 и второго редуктора 20, который соединен со вторым входом силового дифференциала 5, причем выход ограничителя 11 соединен со вторым входом сумматора 13, а выход датчика 17 угла поворота подключен на второй вход узла 16 сравнения.
Устройство работает следующим образом.
При подаче управляющего сигнала, содержащего высокочастотную помеху на выходе измерительного блока 1 появляется рассогласование и исполнительный двигатель 3 приходит в движение. Если угловые положения входного и выходного валов редуктора совпадают, то сигнал управления каналом компенсации, формируемый измерителем 8 разности углов поворота равен нулю. При появлении углового рассогласования из-за наличия люфтов, упругих деформаций в редукторе и возмущений, связанных с нагрузкой, сигнал рассогласования канала компенсации поступает через второй усилитель 9 на преобразователь 10, управляющий первым корректирующим двигателем 6. В результате сложения текущего углового положения выходного вала редуктора с компенсирующей добавкой, вводимой nepBbiM корректирующим двигателем, влияние люфтов, упругих деформаций и возмущений, связанных с нагрузкой, существенно уменьщается.
Для обеспечения повыщения точности слежения и помехоустойчивости сигнал рассогласования с блока 1 поступает через ограничитель 11 на сумматор 13, на который также подается сигнал с датчика 12. Суммарный сигнал проходит через низкочастотный фильтр 14 и зкстраполятор 15. В результате формируется дополнительный программный сигнал, содержащий низкочастотную составляющую спектроуправляющего сигнала. Экстраполятор необходим для формирования упреждения и обеспечения условий устойчивости следящей системы. Второй замкнутый контур, состоящий из блока сравнения 16, третьего усилителя 18, второго корректирующего двигателя 19, редуктора 20, датчика 17, должен быть 1нирокополосным и обеспечивать введение в контур следящей системы через силов,ой дифференциал допониительного программного сигнала с низкочастотным спектром. Путем настройки параметров блока 11 ограничителя и фильтра 14 устанавливаются
такие параметры низкочастотной составляющей спектра программного сигнала, которые обеспечивают существенное повыщение точности слежения и помехоустойчивости следящей системь с компенсацией упругих деформаций с люфта в редукторе.
Существенное преимущество системы в точности имеет место в случае, когда обеспечена высокая корреляция между управляющим и программным сигналами. Так, например, для значений коэффициентов корреляции 0,2, 0,6 и 0,8 выигрыщ по точности составляет соответственно 4, 56 и 278 процентов. Эффективность с точки зрения помехоустойчивости может быть определена как отнощение оптималь ных значений дисперсии ошибки воспроизведения прототипа )И предлагаемой следящей системы ,. Выполнение условия1 п,1и|1)( свидетельствует о преимуществе следящей системы с дополнительным программным сигналом.
Таким образом, формируя дополнительный программный сигнал в соответствии с предложенной схемой, можно обеспечить значительное повышение точности слежения и помехоустойчивости. Формула изобретения
Следящая система, содержащая последовательно соединенные измерительный блок, первый усилитель, исполнительный двигатель, первь1Й редуктор, дифференциал, первый корректирующий двигатель, объект регулирования, выходом подключенный к второму входу измерительного блока и первому Датчику угла,, а также измеритель угла рассогласования, два входа которого подключены соответственно к входу и выходу первого редуктора, а выход - через последовательно соединенные второй усилитель, преобразователь ко второму входу первого корректирующего двигателя, отличающаяся тем, что, с целью повыщения точности и помехоустойчивости системы, в нее введень ограничитель и последовательно соединенные сумматор, фильтр, экстраполятор, блок сравнения, третий усилитель, второй корректирующий двигатель, второй редуктор и второй датчик угла, выход и вход которого подключены ко вторым входам соответственно блока сравнения и дифференциала, выход ограничителя соединен с первым входом сумматора, второй вход которого подключен к выходу первого датчика угла, а вход ограничителя соединен с выходом измерительного блока. Источники информации,
принятые во внимание при зкспертизе
1.Авторское свидетельство СССР № 376752, кл. G 05 В 11/01, 1971.
2.Авторское свидетельство СССР № 366454, кл. G 05 В 11/12, 1971.
3.Авторское свидетельство СССР № 376753, кл. G 05 В 11/06, 1973 (прототип).
вход
| название | год | авторы | номер документа |
|---|---|---|---|
| Следящая система | 1981 |
|
SU1012197A1 |
| Следящая система для управления гелиостатом | 1981 |
|
SU964575A1 |
| Двухканальная следящая система | 1973 |
|
SU446027A1 |
| Следящая система | 1983 |
|
SU1109712A1 |
| Двухканальная следящая система | 1974 |
|
SU503205A1 |
| Следящая система с компенсацией лифта механической передачи | 1976 |
|
SU620940A1 |
| Следящий электропривод наведения механической системы | 1988 |
|
SU1562333A2 |
| Следящий привод с коррекцией люфта в механической передаче | 1976 |
|
SU647646A1 |
| Следящая система | 1975 |
|
SU742871A1 |
| Трехканальная следящая система | 1989 |
|
SU1716479A1 |
выход
