преобразования угловых величин и расширение диапазона изменения преобразуемых углов.
Это достигается тем, что в устройство иреобразования угловых величин в код введены доиолиительные двухполюсные приемники угла, усилитель п исполнительный двигатель, устаиовленный на одном валу с доиолнительными двухполюсными приемниками угла, входы которых соединены с выходами соответствующих многодолюсных датчиков угла, выход одного из донолнительных двухполюсных приемников угла через дополнительный усилитель подключен к дополнительному исполнительному двигателю, выход другого дополнительного двухполюсного прпемника угла - к другому входу блока сравпепия.
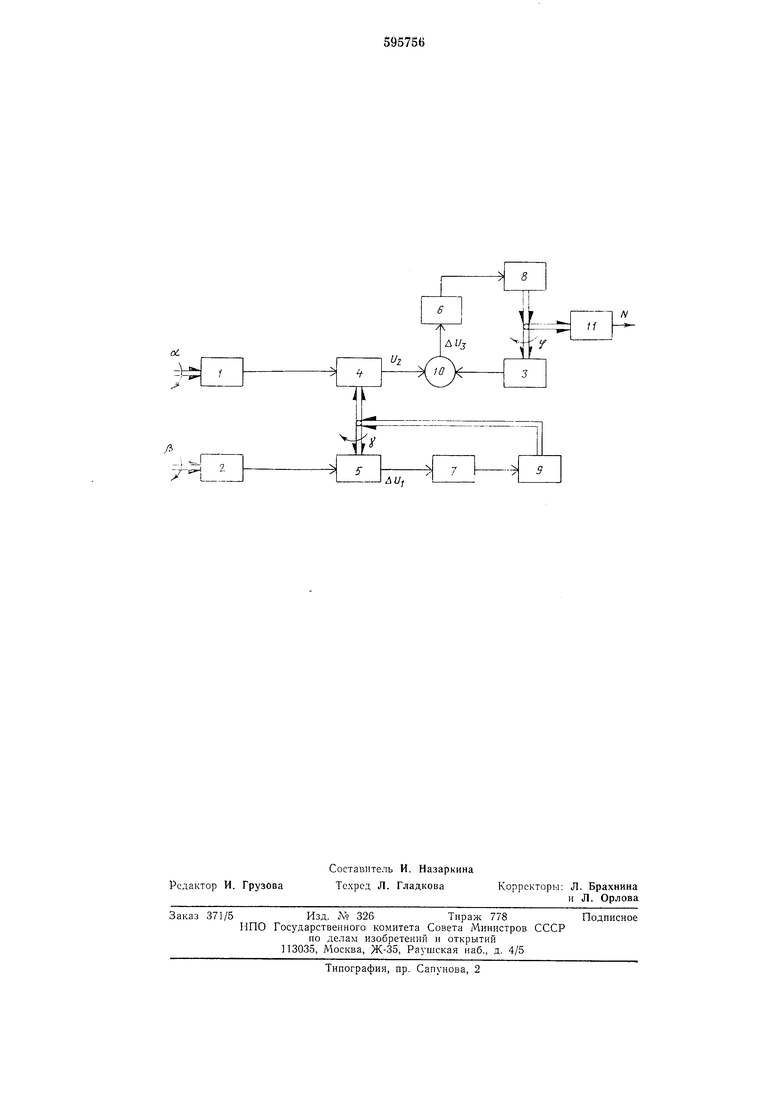
На чертеже представлепа схема предлагаемого устройства.
Устройство преобразовапия угловых величин в код содерл ит многополюсные датчики 1 11 2 угла, основной 3 п дополнительные 4 и 5 двухполюсные приемники угла, основной 6 и дополнптельный 7 усилители, основной 8 п дополнптельный 9 пспо.тнительные двпгатели, блок 10 сравненпя п отсчетное устройство И.
Выходные сигналы многонолюсных датчиков 1 и 2 угла пропорциональны угловым положеииям а и р с коэффициентом электрической редукции Р. Эти сигналы поступают на вход приемников 4 и 5 угла. Выходной сигнал приемника 5 пропорциопальный разностп
А Е б/ - Т + Д + Т.
где Ар - погрешность датчика 2; AY - погрешность прпемника 5;
Y - угловое положенпе приемпика 5, поступает через усилитель на исполнительный двигатель 9. Под действием этого сигнала ошибки двигатель 9 разворачивает ротор прпемника 5, а вместе с ним ротор приемника 4 до согласоваииого положения, т. е. на угол 7 рР+А|3+А - При этом на вход блока 10 сравнения поступает сигнал U с выхода приемника 4, пропорциопальный сумме
У,/(д + &)+Да+Де + Ау,
где Аа - погрешность датчика 1.
На выходе блока сравнения образуется сигнал ошибки АС/з, пропорциональный разности
Е - р (+ Г) + Да + Д + Af + Дс,
где Аф - погрешность приемника 3;
Ф - угловое иолол ;ение прпемпика 3. Под действием этого сигнала ошибки исполнительный двигатель 8 разворачивает ротор приемника 3 угла до согласованного положения, т. е. на угол
. ;(а-|-р)+Да + + А .
На выходе отсчетного устройства 11 фпксируется числовой эквивалент Л (код), пропорпио5 пальный велич1П1:е
Да
V .-- а + 4- Р
Поскольку для мпогополюсных датчиков угла
число пар полюсов обычно составляет 64- 128, а величины Аа, , Ау, Аф составляют несколько минут (для синусно-косинусных вращаюшихся трансформаторов, сельсинов), то числовой эквивалент соответствует сумме
угловых положений аликов объекта с ошибкой, не превышаюшей единицы угловых секунд.
Иепользованне новых элементов: усилителя, двигателя п двух приемников угла, выгодно
отличает предлагаемое устройство от известного. Точность преобразования двух угловых велич1П1 повышается в несколько десятков раз, так как становится возможным нрименение многополюеных нрепизионных датчиков угла
и ликвидируется методическая погрешность нрсобразования, характерная дли прототипа.
Форм у /( а п 3 о б р е т е и и я
Устройство преобразования угловых величпн в код, содержащее многополюсные датчпки угла, блок сравнения, выход которого через усилитель подключен к исполнительному двигате.по, иа валу которого установлены отсчетное устройство, двухнолюсный приемник
угла, выход которого соединен с одним из входов блока сравнения, отличающееся тем, что, с целью повышенпя точности устройства, в него введены дополнительные двухполюсные приемники угла, усилитель и исполнительный
двигатель, который установлен на одном валу с дополнитель}1ыми двухполюспыми приемниками угла, входы которых соединепы с выходами соответствующих многополюсных датчиков угла, выход одного )з дополнительных
двухполюсных приемников угла через донолпительный усилитель подключен к дополпительиому исполнительному двигателю, выход другого дополнительного двухполюсного приемннка угла соединен с другим входо.м блока
сравнеиия.
Нсточникп информации, принятые во внимание при экспертизе
1.Артамонов В. М. Следящие системы радиолокационных станций автоматического сопровождения н управления. Л., «Судостроение, 1965, с. .
2.Ходоров Т. Я. Электромеханические индукционные счетно-реша ощне устройства. Л., Судпромгиз, 1960, с. 73-74.
| название | год | авторы | номер документа |
|---|---|---|---|
| Преобразователь угла поворота вала в код | 1978 |
|
SU788140A1 |
| Преобразователь угла поворота вала в код | 1977 |
|
SU660072A1 |
| Устройство для преобразования угла поворота вала в код | 1974 |
|
SU610148A1 |
| Двухканальный преобразователь угла поворота вала в код | 1976 |
|
SU607248A1 |
| Фазовая система для преобразованияуглА пОВОРОТА B КОд | 1979 |
|
SU842901A2 |
| Устройство для измерения погрешности многополюсного датчика угла | 1980 |
|
SU877723A1 |
| Поворотное устройство | 1980 |
|
SU898484A1 |
| Устройство для отсчета угловых положений вала | 1975 |
|
SU627498A1 |
| Устройство для задания угла поворота | 1979 |
|
SU849269A1 |
| ПОВОРОТНОЕ УСТРОЙСТВО | 1972 |
|
SU421021A1 |