1
Изобретение относится к судостроению, в частности - к сервомеханизмам для изменения шага лопастей крыльчатого движителя.
Известен сервомеханизм для изменения шага лопастей судового крыльчатого движителя, содержащий ходовой и рулевой сервомоторы с цилиндрами и поршнями, связанные с рычагом управления .
Однако в режиме полного хода вперед крыльчатый движитель с таким сервомеханизмом создает дополнительный упор перпендикулярно диаметральной плоскости судна, что требует затрат мощности на преодоление создающегося сопротивления.
Цель настоящего изобретения заключается в повышении экономичности судовых двигателей. Для этого цилиндр ходового сервомотора выполнен внутри поршня рулевого сервомотора, а оси цилиндров рулевого и ходового сервомоторов взаимно перпендикулярны. Кроме того, поршни сервомоторов расположены симметрично относительно рычага управления.
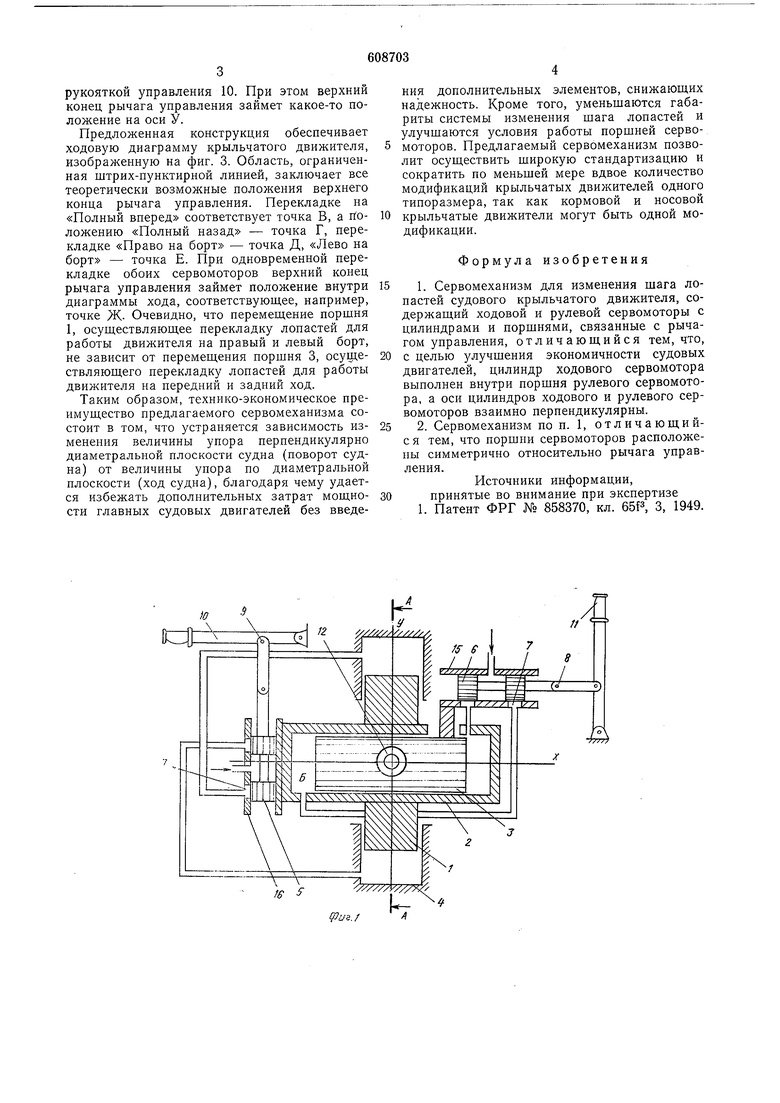
На фиг. 1 изображена принципиальная схема предлагаемого сервомеханизма; на фиг. 2 - разрез А-А; на фиг. 3 - ходовая диаграмма крыльчатого движителя.
Внутри крестообразного поршня 1 выполнен цилиндр 2 ходового сервомотора и поршень 3. Поршень 1 перемещается в цилиндре 4 рулевого сервомотора. Золотники 5 и 6 служат
для подачи рабочей жидкости через окна питания 7 в полости рулевого и ходового сервомоторов. Посредством рычагов 8 и 9 золотники соединены с рукоятками управления 10 и И. В поршень 3 встроена шаровая опора 12 рычага управления 13. Цилиндр 4 жестко прикреплен к корпусу 14 крыльчатого движителя. Гильза 15 золотника 6 жестко связана с поршнем 3, а гильза 16, золотника 5 - с цилиндром 2 ходового сервомотора.
При нулевом положении поршней начало координат XV совпадает с точкой пересечения осей поршней и верхним концом рычага 13 управления. При смещении золотника 6 рукояткой управления 11 вправо рабочая жидкость через открывшееся окно питания 7 поступает в полость Б цилиндра 2, что приводит к перемещению поршня 3 и гильзы 15 вправо до тех пор, пока окно питания 7 не перекроется первым буртиком золотника 6 и не прекратится подача жидкости в полость Б. При смещении золотника влево движение всех указанных элементов будет происходить в противоположном направлении, а верхний конец рычага управлепия займет какое-то положение на оси X. Подобным же образом, но в перпендикулярном направлении, будет происходить двилсение поршня 1 и вместе с ним поршня 3 и верхнего конца рычага управления в цилиндре 4 при смещении золотника 5
рукояткой управления 10. При этом верхний конец рычага управления займет какое-то положение на оси У.
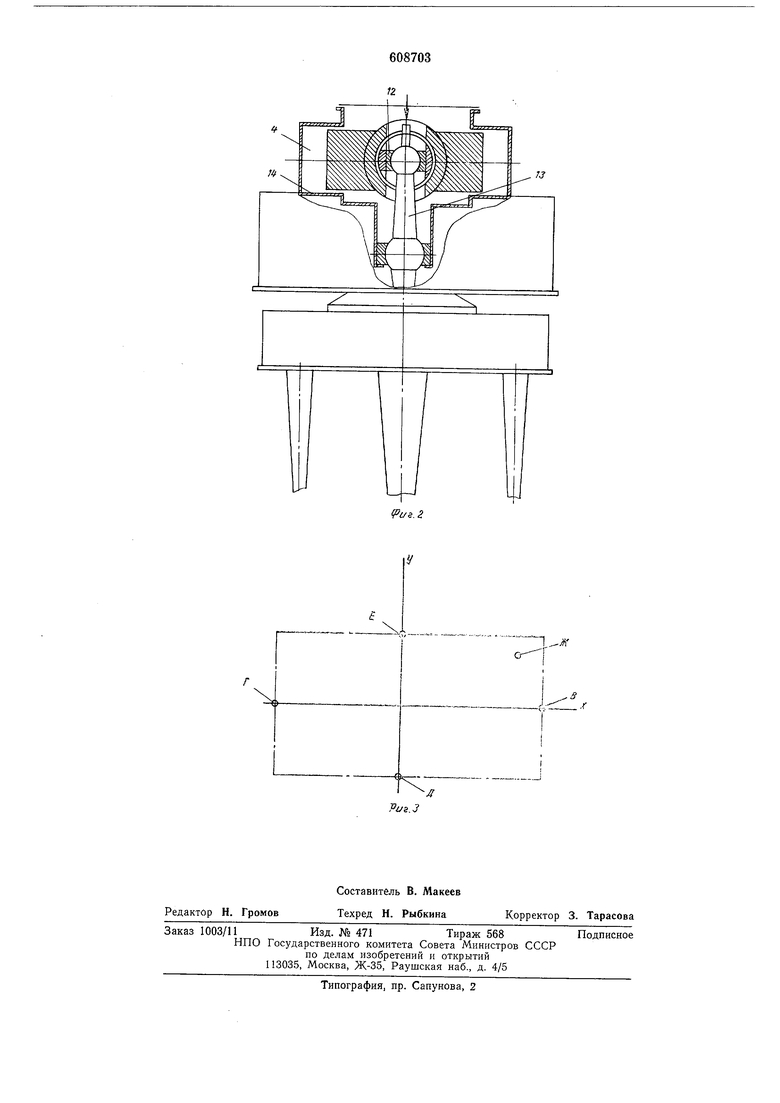
Предложенная конструкция обеспечивает ходовую диаграмму крыльчатого движителя, изображенную на фиг. 3. Область, ограниченная штрих-пунктирной линией, заключает все теоретически возможные положения верхнего конца рычага управления. Перекладке на «Полный вперед соответствует точка В, а nfoложению «Полный назад - точка Г, перекладке «Право на борт - точка Д, «Лево на борт - точка Е. При одновременной перекладке обоих сервомоторов верхний конец рычага управления займет положение внутри диаграммы хода, соответствующее, например, точке Ж. Очевидно, что перемещение поршня 1, осуществляющее перекладку лопастей для работы движителя на правый и левый борт, не зависит от перемещения поршня 3, осуществляющего перекладку лопастей для работы движителя на передний и задний ход.
Таким образом, технико-экономическое преимущество предлагаемого сервомеханизма состоит в том, что устраняется зависимость изменения величины упора перпендикулярно диаметральной плоскости судна (поворот судна) от величины упора по диаметральной плоскости (ход судна), благодаря чему удается избежать дополнительных затрат мощности главных судовых двигателей без введения дополнительных элементов, снижающих надежность. Кроме того, уменьшаются габариты системы изменения шага лопастей и улучшаются условия работы поршией сервомоторов. Предлагаемый сервомеханизм позволит осуществить широкую стандартизацию и сократить по меньшей мере вдвое количество модификаций крыльчатых движителей одного типоразмера, так как кормовой и носовой крыльчатые движители могут быть одной модификации.
Формула изобретения
1. Сервомеханизм для изменения шага лопастей судового крыльчатого движителя, содержащий ходовой и рулевой сервомоторы с цилиндрами и поршнями, связанные с рычагом управления, отличающийся тем, что,
с целью злучшеиия экономичности судовых двигателей, цилиндр ходового сервомотора выполнен внутри поршня рулевого сервомотора, а оси цилиндров ходового и рулевого сервомоторов взаимно перпендикулярны.
2. Сервомеханизм по п. 1, отличающийс я тем, что поршни сервомоторов расположены симметрично относительно рычага управления.
Источники информации,
принятые во внимание при экспертизе
1. Патент ФРГ № 858370, кл. 65Р, 3, 1949.
| название | год | авторы | номер документа |
|---|---|---|---|
| Гидравлический привод судовой рулевой машины | 1983 |
|
SU1109337A1 |
| Рулевое устройство судна | 1990 |
|
SU1787865A1 |
| Судовой гребной винт регулируемого шага | 1972 |
|
SU468835A1 |
| МНОГОЦЕЛЕВОЕ СУХОГРУЗНОЕ СУДНО | 2005 |
|
RU2297942C2 |
| Рулевое устройство судна | 1982 |
|
SU1041414A1 |
| Система управления движителем | 1989 |
|
SU1634569A1 |
| КОМБИНИРОВАННЫЙ КРЫЛЬЧАТЫЙ ДВИЖИТЕЛЬ ПОДВОДНЫХ АППАРАТОВ | 2023 |
|
RU2806471C1 |
| Исполнительный механизм судового винта регулируемого шага | 1981 |
|
SU977274A2 |
| СИСТЕМА ДИСТАНЦИОННОГО АВТОМАТИЗИРОВАННОГО | 1973 |
|
SU383651A1 |
| УСТРОЙСТВО для КОРРЕКТИРОВАНИЯ | 1967 |
|
SU199698A1 |
0
л
./
I /
ь
Ж
Г
