крыльчатым движителем Цель изобретения -повыпение скорости обработки движителем заданного угла поворота.Система управления содержит устройство 1, блок 2 сравнения, два основных 3, и два дополнительных 5,6 усилителя, один основной 9 и один дополнительный 12 золотники постоянного расход рабочей жидкости, причем расход рабочей жидкости дополнительного золот ника больше или равен, чем у основного, а коэффициент усиления и чувствительность дополнительных усилителен меньше, чем у основных0 1 ил0
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖИТЕЛЕМ | 2011 |
|
RU2458818C1 |
| СИСТЕМА УПРАВЛЕНИЯ СУДОВЫМ ДВИЖИТЕЛЕМ | 2016 |
|
RU2647335C1 |
| УСТРОЙСТВО ДЛЯ АКТИВНОГО УПРАВЛЕНИЯ СУДНОМ | 1996 |
|
RU2142894C1 |
| Способ управления мобильным агрегатом и устройство для его осуществления | 1988 |
|
SU1808233A1 |
| Транспортное средство | 1983 |
|
SU1154117A1 |
| СПОСОБ КООРДИНИРОВАННОГО МАНЕВРИРОВАНИЯ СУДНА | 2010 |
|
RU2429161C1 |
| СПОСОБ АВТОМАТИЧЕСКОЙ ПРОВОДКИ СУДОВ | 2005 |
|
RU2277495C1 |
| V-ОБРАЗНО СПАРЕННЫЙ ШНЕКОВЫЙ ДВИЖИТЕЛЬ ДЛЯ ПЛАВСРЕДСТВ (ВАРИАНТЫ) | 2015 |
|
RU2613472C1 |
| СПОСОБ СОЗДАНИЯ СИСТЕМЫ СИЛ ЛЕТАТЕЛЬНОГО АППАРАТА САМОЛЕТНОЙ СХЕМЫ И НАЗЕМНО-ВОЗДУШНАЯ АМФИБИЯ (НВА) ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1998 |
|
RU2127202C1 |
| СПОСОБ АВТОМАТИЧЕСКОЙ ПРОВОДКИ СУДНА | 2012 |
|
RU2501708C1 |
Итооретение относится к судостроению, в частности к системам управления чвш rii онями,п гом 4HCjie вин- 1 ом регулируемого шага, подруливающим устройством, водометным движителем с реверсшшо-рулевым устройством, состояищм m рулей и парабанов, и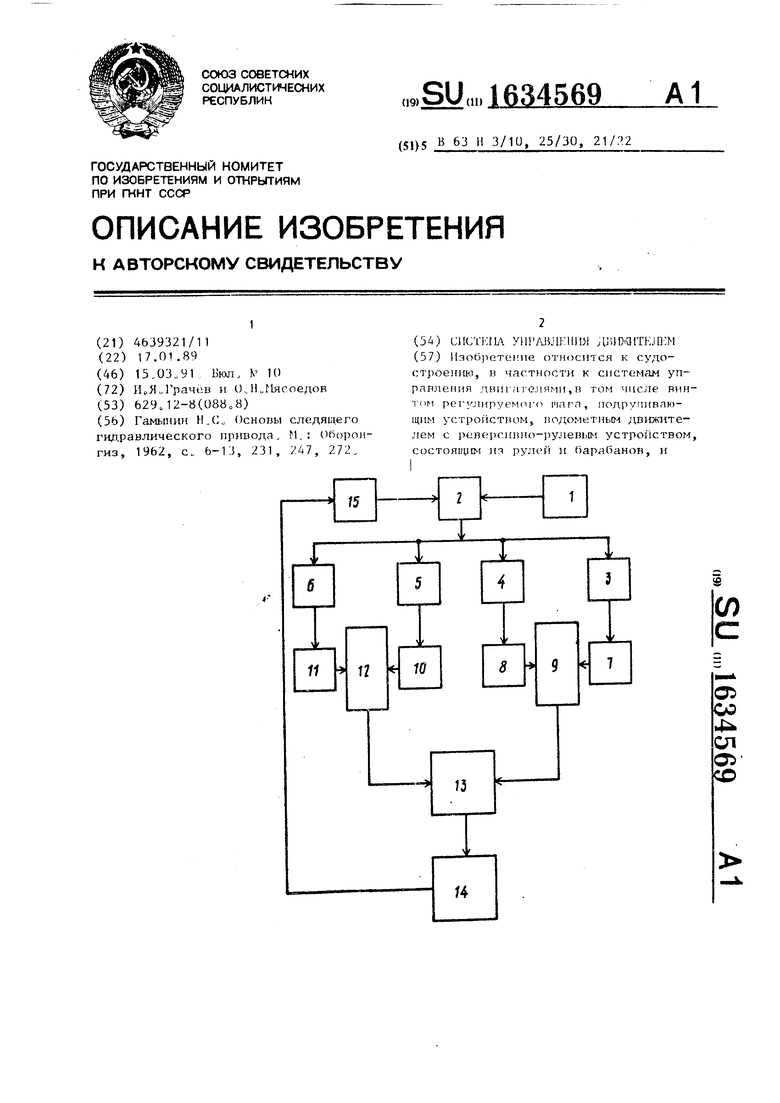
Изобретение относится к судостроению, в частности к системам управления движителями, в том числе винтом
регулируемого пага (ВРИО, подрули- ваюцим устройством (НУ), водометным движителем (БД) с реверсивно-руле- выми устройствам (РР), состоящими из рулей и барабанов, и крыльчатым движителем (КД)
а
Целью изобретения является повышение скорости отработки движителем
ГЦ1 JKuUl у:фав;:иНЯЯс
На чертеже изображена блок-схема предлагаемой системы управленияв
Система, управления содержит задающее устройство 1, к выходу к, горого подключен один из входов блока сравнения 2, своим выходом соединенного с входами основных усилителей 3 и 4 с большими коэффициентами усиления и большей чувствительностью и входами дополнительных усилителей 5 и 6 с коэффициентами усиления и чувствительностью меньшими, чем у основных, к выходам которых соответственно подключены электромагниты 7 и 8 золотника У постоянного расхода рабочей жидкости и электромагниты 10 и 11 дополнительного золотника 12 с большим или равным, чем у основного золотника проходным сечением и расходоми Золотники 9 и 12 соединены своими выходами с исполнительным механизмом 13 движителя 14, своим выходом соединенного с входом датчика 15 обратной связи, который своим входом соединен с вторым входом блока сравнения 2С
Из соображений большей надежности и меньшей стоимости желательно применить дискретные усилители и золотники с постоянным расходом рабочей жидкости, но возможно применение золотников с переменным расходом
Система управления работает следующим образом
5
0
5
0
5
0
5
0
5
При отклонении задающего устройства 1 на сравнительно небольшой угол блок сравнения 2 формирует небольшой сигнал соответственно вперед или назад, который поступает на входы усилителя. соответственно 3 и 5 (вперед) или 4 и 6 (назад)„
В связи с тем, что, по сравнению с усилителями 5 и 6, усилители 3 и 4 имеют большие коэффициенты усиления и большую чувствительность и, следовательно, меньшую зону нечувствительности, они выдают сигнал управления соответственно на электромагнит 7 (вперед) или 8 (назад) золотника У, который подает рабочую жидкость на исполнительный механизм 13 движителя 14 на отработку поворота движителем небольшого угла с малой скоростью вперед или назад0
i
При отклонении вперед-назад задающего устройства 1 на большой угол, достаточный для формирования сигнала на срабатывание усилителей 5 и 6, имеющих по сравнение с усилителями 3 и 4 меньшие коэффициенты усиления и меньшую чувствительность и, следовательно, большую зону нечувствительности, блок сравнения 2 формирует од повременно малый и большой сигналы соответственно вперед или назад и подает их одновременно на усилители 3 и 5 (вперед) или 4 и 6 (назад), которые соответственно подают сигналы срабатывания на электромагниты 7 (вперед) или 8 (назад) золотника 9 малого постоянного расхода рабочей жидкости и 10 (вперед) или 11 (назад) большего или равного расхода рабочей жидкости, .которые подают на исполнительный механизм 13 суммарное количество рабочей жидкости, в результате чего отработка поворота движителя 14 происходит на большой угол с большой скоростью
Предлагаемая система позволяет получить в режиме поддержания курса судна на переднем-заднем ходу (или при маневрировании вправо-влево) воя- можность отработки поворота движителя на небольшие углы с небольшой скоростью, необходимой для обеспечения заданной точности установки угла поворота движителя (лопастей ВРЫ, баллера, рулей и барабанов и
ТоПо)о
Кроме того, в режимах реверса или маневрирования возникает возможность отработки поворота движителя на боль- шие углы с большой скоростью, т„е0 повысить быстродействие системы управления движителем, что значительно сокращает время маневрирования, улучшая маневренность и управляемость судном, например, при швартовке, прохождении узкостей и вблизи других судов, облегчает работу судоводителя„
Таким образом, предлагаемая система управления с двумя скоростями отра- ботки движителем сигналов управления значительно повышает тактико- технические качества судна, его маневренность и позволяет снизить вероятность возникновения аварийных ситуации и столкновения судов при швартовке, проходах узкостей и вблизи других судов„
о
рмула изобретения
Система управления движителем, содержащая задающее устройство, выход которого соединен с одним из входов блока сравнения, подключенного к входу по крайней мере одного усилителя, выход которого соединен с электроприводом золотника, сообщенного с входом исполнительного механизма движителя, и датчик обратной связи, соединенный с другим входом блока сравнения, отличающая- с я тем, что, с целью повышения скорости обработки движителем заданного угла поворота, она снабжена по крайней мере одним дополнительным усилителем и дополнительным золотником с электроприводом, соединенными между собой идентично усилителю и золотнику, причем вход дополнительного усилителя подключен к выходу блока сравнения, а выход дополнительного усилителя сообщен с другим входом исполнительного механизма, при этом площадь проходного сечения дополнительного золотника не меньше плоцади проходного сечения первого золотника, а коэффициент усиления дополнительного усилителя меньше коэффициента усиления первого усилителя м
| Гамынин Л Основы следящего гидравлического привода, М.: Оборонгиз, 1962, с | |||
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
