Изобретение относится к приборам автоматики, может быть применено в прецизионных телеметрических следящих системах непрерывного действия и цифровых следящих системах.
В существующих телеметрических следящих системах, которые содержат электродвигатель с двумя обмотками управления и обмоткой возбуждения, суммирующее устройство, тахогенератор, усилитель и иитегрирующее устройство для компенсации динамических ошибок, используют электромеханические сглаживающие системы с астатизмом второго порядка. Корректирующий сигнал от входного воздействия в таких системах, как правило, подается в цепь усилителя следящей системы, где суммируется с самим воздействием. Часто на вход усилителя подается и производная воздействия.
Недостатком этих систем является необходимость суммирования нескольких величин на линейном участке характеристики усилителя, что усложняет настройку и сказывается на точности и помехоустойчивости. Корректирующие сигналы в системах малоэффективны.
ключена к выходу интегрирующего устройства, вырабатывающего корректирующий сигнал. Это позволяет повысить эффективность коррекции и благодаря этому повысить точ5 иость и помехоз стойчивость следящей системы.
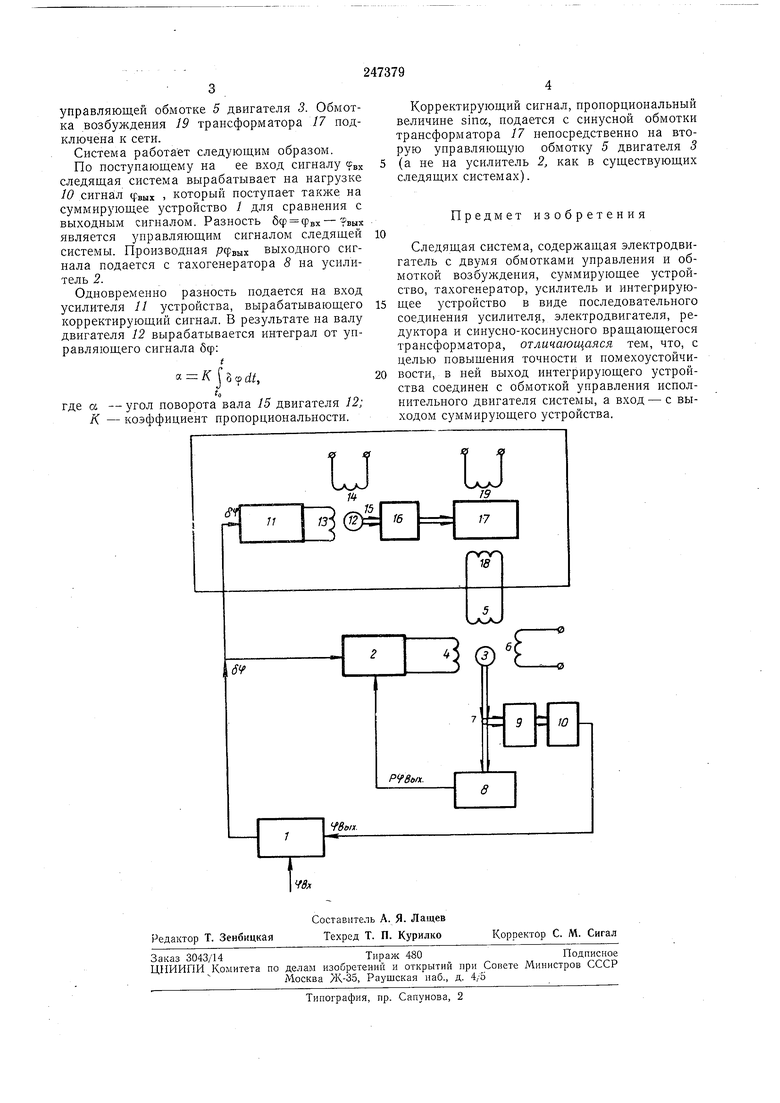
Па чертеже представлен пример построения следящей системы.
Следящая система содержит последовательно включенные суммирующее устройство Л усилитель 2 и двигатель 3 с двумя управляющими обмотками 4 н 5 (как, например, двигатели серий ДИД, ДГ, ДКМ). Выход усилителя 2 подключеи к управляющей обмотке 4
5 двигателя 3. Обмотка 6 - обмотка возбужденпя. К валу 7 двигателя 3 присоединены тахогенератор 8 и - через редуктор 9 - нагрузка 10, электрически соединенная с суммирующим устройством /.
0 Устройство выработки корректирующего сигнала состоит из последовательно включенных усилителя 11, двигателя 12 (с управляющей обмоткой 13 и обмоткой возбуждения 14) и ирисоединенного к валу 15 двигателя 12
5 через редуктор 16 синусно-косинусного вращающегося трансформатора 17, питаемого от сети переменного тока. Вход усилителя 11 подключеи к выходу суммирующего устройства 1, а выходная синусная обмотка 18
управляющей обмотке 5 двигателя 3. Обмотка возбуждения 19 трансформатора 17 подключена к сети.
Система работает следующим образом.
По поступающему на ее вход сигналу следящая система вырабатывает на нагрузке 10 сигнал фвых , который поступает также на суммирующее устройство / для сравнения с
выходным сигналом. Разность бф
является управляющим сигналом следящей системы. Производная рфвых выходного сигнала подается с тахогенератора 8 на усилитель 2.
Одновременно разность подается на вход усилителя 11 устройства, вырабатывающего корректирующий сигнал. В результате на валу двигателя 12 вырабатывается интеграл от управляющего сигнала бф:
а С j 3 ср Л,
0
где а - угол поворота вала 15 двигателя 12; К - коэффициент пропорцнональпости.
Корректирующий сигнал, пропорциональный величине sina, подается с синусной обмотки трансформатора 17 непосредственно на вторую управляющую обмотку 5 двигателя 5 (а не на усилитель 2, как в существующих следящих системах).
Предмет изобретения
Следящая система, содержащая электродвигатель с двумя обмотками управления и обмоткой возбуждения, суммирующее устройство, тахогенератор, усилитель и интегрируЕОщее устройство в виде последовательного соединения усилителр, электродвигателя, редуктора и синусно-косинусного вращающегося трансформатора, отличающаяся тем, что, с целью повышения точности и помехоустойчивости, в ней выход интегрирующего устройства соединен с обмоткой управления иснолнительиого двигателя системы, а вход - с выхо/аом суммирующего устройства.
(f
| название | год | авторы | номер документа |
|---|---|---|---|
| Следящая система для отработки арктангенсной функции | 1973 |
|
SU488223A1 |
| Бесконтактный регулируемый электропривод | 1986 |
|
SU1361697A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ЭЛЕКТРОВОЗОМ | 1968 |
|
SU207966A1 |
| Следящий электропривод | 1991 |
|
SU1833828A1 |
| Следящая система | 1982 |
|
SU1118961A1 |
| Интегрирующий привод переменного тока | 1984 |
|
SU1275365A1 |
| СИСТЕМА УПРАВЛЕНИЯ ПРИВОДОМ АНТЕННЫ | 1999 |
|
RU2184991C2 |
| Вентильный электропривод | 1988 |
|
SU1633477A1 |
| Следящая система | 1981 |
|
SU999014A1 |
| Бесконтактный регулируемый электропривод | 1982 |
|
SU1075344A1 |
6Ч
5 Сз.
Pf8t,n.
