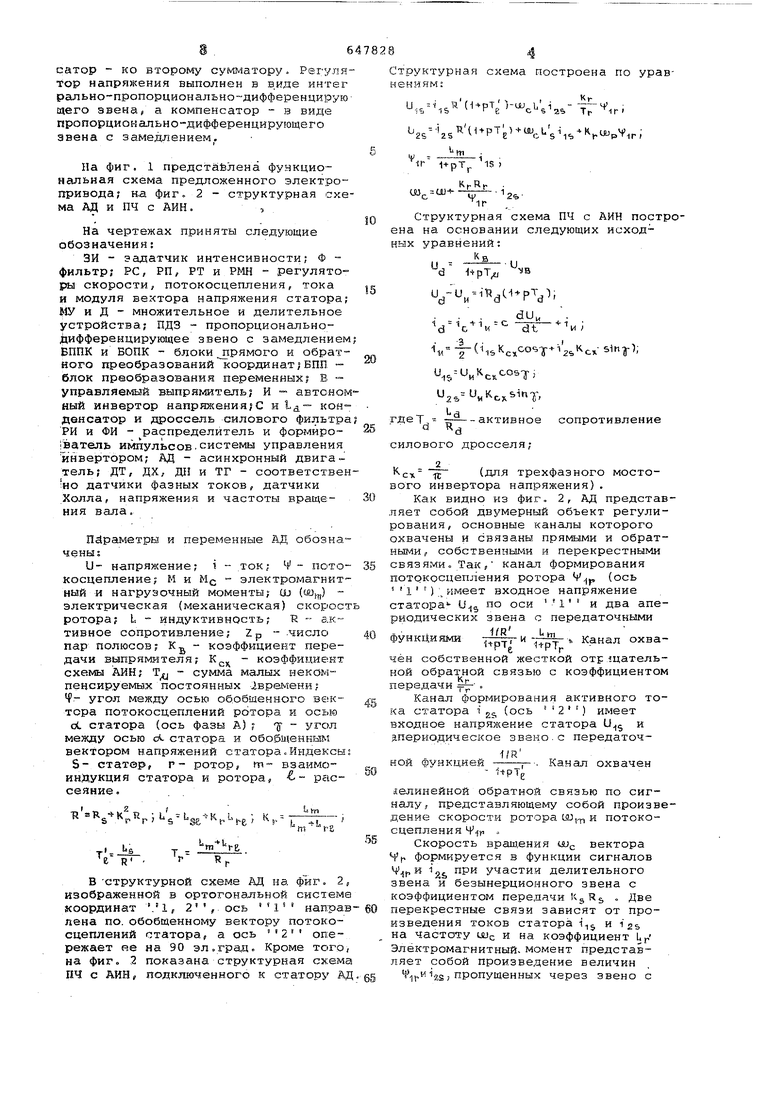
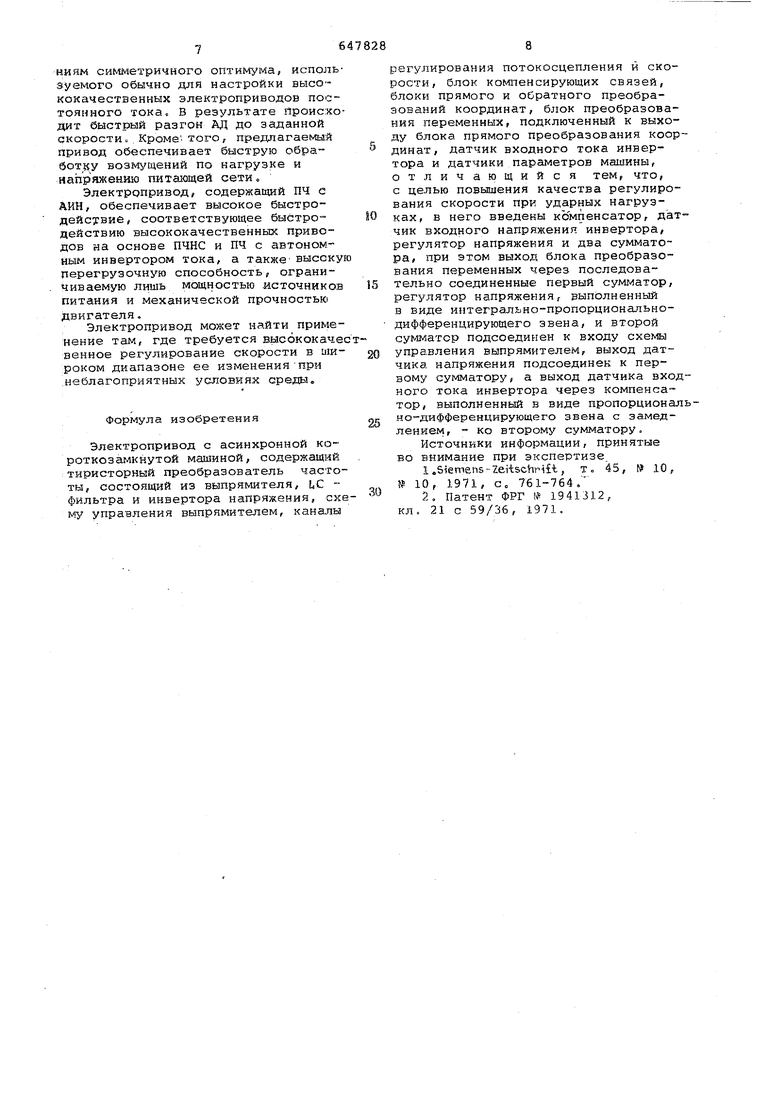
.,... .- ,- ,. - V;.;: Изобретение относится к частотнр управпяеюлм электроприводам и может быть использовано в текстильной Про мышленности (в произйодстве искуественного волокна), для быстроходных шлифовальных станков, быстроход ных HkcocoB большой мощности и в других отраслях. : Динамические и статические свойства частотно-управляемых асинхронных приводов существенно зависят от типа применяемых преобразователей частоты (ПЧ). Известны звысокодинамичные электр приводы на основе (ПЧ) непосредственной связью (ПЧНС) и на основе ПЧ с автономным инвертор)ом тока (АИТ) ll , 2. Существует также многочисленная группа быстро одных приводов , для которых единственно возможным по технико-экономическим соображениям и условиям практической реализаций является преобразователь частоты с автономным инвертором, напряжения (ПЧ с АЙН). Недостатком указанных электропри водов является низкое качество регулирования скорости. Целью изобретения является повншёние качества регулирования скорости при ударных нагрузках. Это дос.тиГается тем, что в предлагаемый электропривод с асййх|5онной короткозамкнутой машиной, содержащий тиристорный. И1реобразователь частоты с выпря1«йтелем и схемой управления им, UC -фильтром, инвертором напря женин и датчиком входного тока инвертора, каналы регулирования потокЬсцеплёииЯ и скорости, блок компенсирующих связей, блоки прямого и обратного преобразований координат, блок преобразования переменных, подключенный к вйходу блока прямого преобразования координат, и датчики параметров машины, введены компенсатор, датчик входного напряжения инвертора, регулятор напряжения и два сумматора, при зтом выход блока преобразования переменных через последовательно соединенные первый сумматор, регулятор напряжения и второй сумматор подсоединен к входу схемы управления выпрямителем преобразователя частоты, выход датчика напряжения подсоединен к первому Сумматору, а выход датчика входного тока инвертора через компенсатор - ко второму сумматору. Регуля тор напряжения выполнен в в.иде интег рально-пропорционально-дифференцирую вдего звена, а компенсатор - в виде пропорционально-дифференцирующего эвена с замедлением. , На фиг. 1 предстаЬлена функциональная схема предложенного электропривода; на фиг. 2 - структурная схе ма АД и ПЧ с АЙН. , На чертежах приняты следующие обозначения: ЗИ - эадатчик интенсивности; Ф фильтр; PC, РП, РТ и РМН - регулято1йл скорости, потокосцепления, тока и модуля вектора напряжения статора Ь1У и Д - множительное и делительное устройства; ПДЗ - пропорциональнодифференцирующее звено с замедлением БППК и БОПК - блоки JIpямoгo и обратного преобразований координат;БПП блок преобразования переменных; В управляемый выпрямитель; И - автоном ный инвертор напряжения;С и ta- конденсатор и дооссель силового фильтра РИ .и ФИ - распределитель и формиро вa тёль импульсов. системы управления инвертором; АД - асинхронный двигатель; ДТ, ДХ, ДН и ТГ - соответствен но датчики фазных токов, датчики Холла, напряжения и частоты враще.ния вала. ; V Параметры и переменные АД обозна чены; и- напряжение; i - ток; - пото косцепление; М и MQ - электромагнит ный и нагрузочный моменты; ш () электрическая (механическая) скорос ротора; L - индуктивность; тг - активное сопротивление; 2р - число пар полюсов; К - - коэффициент передачи выпрямителя; Кр - коэффициент схемы АЙН; Лд сумма малых некомпенсируемых постоянных времени; V- угол между осью обобщенного вектора потокосцеплёний ротора и осью oL статора (ось фазы А) ; if - угол мёзвду осью сА. статора и обобщенным вектором напряжений статора.Индексы S- статор, р- ротор, т- взаимоиндукция статора и ротора, -С- рассеяние. . . 1, TUJia. Вструктурной схеме АД на фиг. 2 ИзббражённЬй в ортогональной систем направ координат пена по. обобщенному вектору потокосцеплений статора, а ось 2 опережает ее на 90 эл.град. Кроме того на фиг. 2 показана структурная схем ПЧ с АЙН, подключённого к статору А Структурная схема построена по уравнениям:u H nCi-p-rp- i..i.,,; 2s- 2s 4 P e - csS,,,i V - If 1+pTj, 1S ) (JUc,4i-«--i Структурная схема ПЧ с АЙН построена на основании следующих исходных уравнений: з 1+рТ ), . .dUn . dV iM -idT- H; (,.,K.v ); JI«, Uas U Kb sin-y, где Т : -активное сопротивление силового дросселя; К си tc (для трехфазного мостовсзгго инвертора напряжения) . Как видно из фиг. 2, АД представляет собой двумерный объект регулирования, основные каналы которого охвачены и связаны прямыми и обратными, собственными и перекрестными связями. Так, канал формирования потокосцепления ротора (ось 1):. имеет входное напряжение статора- U ° ° .1 и два апериодических звена с передаточными 4 If} Г функциями pfppp-и fc Канал охвачен собственной жесткой отр щательной обратной связью с коэффициентом передачи -. Канал формирования активного тока статора i (ось 2) имеет входное напряжение статора U и периодическое звено.с передаточной функцией :--. Канал охвачен - ItpTg нелинейной обратной связью по сигналу, представляющему собой произведение скорости ротора ии и потокосцепления Slp . Скорость вращения Шс вектора Sr формируется в функции сигналов V.),, и при участии делительного звена и безынерционного звена с коэффициентом передачи Kg Rj, . Две перекрестные связи зависят от произведения токов статора i.,j и igs на частоту uuc и на коэффициент Uj. Электромагнитный, момент представляет собой произведение величин ii- 2s j пропущенных через звено с коэффициентом передачи -|-ZpKp. Интег ральное звено 1)Тр учитывает механическую инерцию привода. Автономный инвертор напряжения содержит апериодическое звено с передаточной функцией - описывающей управляемый выпря -дтель, и фильтр второго порядка с передаточн ; При вычитании функцией из выходного сигнала .этого фильтра сигнала выходного тока i, АЙН, умноженного на передаточную функцию RdU- pTal t ,Cptl получают входное напряжение и„ АЙН. Выходные фазные напряжения АЙН и в системе координат 1, 2 формируются как произведения напряжения (J на направляющие гармонические сигналы Kj- sint и сигнал тока IH как сужала: произведений токов is статора АД на те же направляющие гармонические сигналы. На основании объединенной струк™ турной схе№Л объекта регулирования и силового регулирующего органа сйн тезирована двухканальная структурная система регулирования электропривода (см. фиг. 1). Один канал состоит из инте.грально-Пропорционал ного (ИП) регулятора PT тока намагничивания статора, а другой ка нал - из задатчика интенсивности ЗИ, фильтра Ф, ИП регулятора скорос ти, делительного устройства Д и ИП регулятора РТ активного тока статора. Регуляторы в каждом канале соединены между собой по принципу п чиненного регулирования. Выходы регуляторов РТ и РТ2 подключены к су маторам компенсирующих связей, обес печивающим развязку каналов управления. Сигналы компенсирующих связе формируются при помсаци множительных устройств МУ - МУд и блока обратно го преобразования координат БОПК, соединенного с блоком прямого преоб разования координат ВППК и с ЛатЧик ми фазных токов ДТд и ДТд асинхронного двигателя АД, датчиками Холла ДХ.и ДХ и .датчиком частоты вра щения вала ТГ. Выходы блока БППК соединены с входеоии блока преобразования переменных БПП, формирующег сигнал заданного значения входного напряжения и АНН и задающие j-apмонические сигналы- sinCy ), cpsCTr+v) угла обобщенного вектора и фазных напряжений АД, отсчитывае мого 6т магнитной оси Фазы А статора АД. Сигнал и подается на вход интегрально-пропорционально-диффере циального . (ИПД) регулятора РМН моду ля вектора и (или входного напряжения АЙН), ВЫХОДНОЙ сигнал которого после суммирования с выходным сигналом датчика ДТ входного тока IM автономного инвертора напряжения# пропущенным через пропорциональнодифференцирующее звено с замедлением ПДЗ , подключен к входу системы управления выпрямителем В. Другие выходные сигналы блока БПП б1п(у + ч), сой1-|- ч) подключены к входам распределителя импульсов РИ и формирователя импульсов ФИ системы управления инвертором И, выход которого соединен со статором асинхронного двигателя АД. Между выпрямителем В и инвертором И включен дроссель L и конденсатор С силового фильтра. Сигнал обратной связи регулятора РМН подается с выхода датчика напряжения ДН. Для того чтобы стабилизировать качественные показатели переходного процесса регулирования момента при изменении потокосцепления ротора, вход делитель делительного устройства Д связан с выходным сигналом V,, блока БОПК. Электропривод в типовом режиме работает следующим образом. Сначала подается задающий сигнал Ч,, на вход регулятора потокосцеплений РП, который, компенсируя большую постоянную времени Tj, объекта, формирует переходный процесс установления, заданного потокосцепления ротора I соответствующий модульному оптимуму. Одновременно РП вырабатывает уставку-для регулятора РТ тока намагничивания АД, который компенсирует большую постоянную времени рассеяния Tg двигателя. Регулятор РТ., в свою очередь вырабатывает уставку регулятора РЬШ входного напряжения инвертора,- компенсируявдего больише постоянные чремени силового фильтра ПЧ, и уставку фазового угла вектора напряжения статора. Оптимальный процесс изменения Ч,, формируется совместным действием регуляторов РП, РТ и РМН. Затем на вход PC через фильтр Ф подается сглаженный линейный сигнал задания скорости. Одновременно на выходе PC появляется сигнал задания электромагнитного момента, который после прохождения через делительное устройство Д образует сигнеш задания активноготока igs статора. PC компенсирует электромеханическую постоянную времени PTg - постоянную времени рассеяния. Контуры регулирования скорости, активного и намагничивающего токов статора совместно с контуром регулирования входного напряжения инвертора и каналом управления фазой обобщенного вектора напряжений статора формируют типовую диаграмму электромагнитного момента, соответствующую предписа76 симметричного ойтиМумаГй йШь зуемого обычно для настройки высокбкачественных электроприводов постоянного тока. В результате происхо дит быстрый разгон АД до заданной скорости. Крометого, предпагае№ай привод обеспечивает быструю обра ;ЙОТДУ воэмутёнйй йь;л1 руэ ё1й-™ напряжению питающей сети. Электропривод, содержащий ПЧ с АЙН, ое5ёспёчивает высокое быстрб действие/ соотвефствующее быстродействию высококачественных приводов на основе ПЧНС и ПЧ с автоном ййй инвертором тока, агакже° тЗ&:ук перегрузочную способности, ограни. чиваемую лишь мощностью источников питания и Механической прочностью двигателя. Электропривод может найти применение там, где требуется высококаче венное регулирование скорости в широком диапазоне ее изменения при неблагОг1рйя нйХ условиях среда. Формула йз6б:рётёния )5прйбЬд с асинхронной ко зоткозамккутой майиной, содержащий тйрийтор яый .преоЙразоеате ь- ч аЪ о ты, сйстрящий из шапрякйтелй, КС фИ 1Ьтр1й И инвертора напряжения, сх W упраййбния вйирямителем, каналы регулирования потокосцепления и скорости, блок компенсирующих связей, блоки прямого и обратного преобразований координат, блок преобразования переменных, подключенный к вйходу блока прямого преобразования координат, датчик входного тока инверtopa и Датчики nai aMeTpoB машина, от ли ч а ю щ и и с я тем, 1тЬ, с целью пбвы аейия качества регулирования скорости при ударных нагрузках, в него введены ксгмпенсатор, датчик входнбго йапряжения инвертора, регулятор напряжения и два суАШатора, при этом выход блока преобразования переменны1« через последовательно соединенные первый сумматор, 114гулятор напряжения, выполненный в виде и1 т1§грсшьно-пропорционгшьнодифференцирующего звена, и второй сумйатор подсоединен к входу схемы управлен|Гя вб5Прямйтелем, выход датчика напрйжения подсоединен к первому суййатору, а выход датчика входного тока инвертора через компенсатор, вьШолненный в виде пропорциональнО-дйффё &1нцирующего звена с замедлением j - ко второму сумматору. источники информации, принятые во вииманиё при экспертизе. 1.Siemens-Zeitschrift, Т. 45, И 10, ; id, 1971, с. 761-764. 2. Патент ФРГ № 1941J12, кл. 21 с 59/36, 1971. INX, „ i -v s -4 j
if
.,,...

| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод с асинхронным двигателем с массивным обмотанным ротором | 1976 |
|
SU610276A1 |
| Асинхронный электропривод | 1975 |
|
SU809461A1 |
| Электропривод с асинхронным короткозамкнутым двигателем | 1976 |
|
SU615584A1 |
| Электропривод с асинхронной машиной с фазным ротором | 1973 |
|
SU517126A1 |
| Электропривод с асинхронным короткозамкнутым двигателем | 1975 |
|
SU611282A1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| Устройство для управления электроприводом переменного тока | 1977 |
|
SU738090A1 |
| Устройство управления электроприводом переменного тока | 1976 |
|
SU657558A1 |
| ЭЛЕКТРОПРИВОД С СИНХРОННЫМ ДВИГАТЕЛЕМ | 1995 |
|
RU2092967C1 |
| Электропривод | 1987 |
|
SU1515324A1 |


